单端反激(离散系统仿真)
指令电压为0,电机微速旋转,补足指令电压。
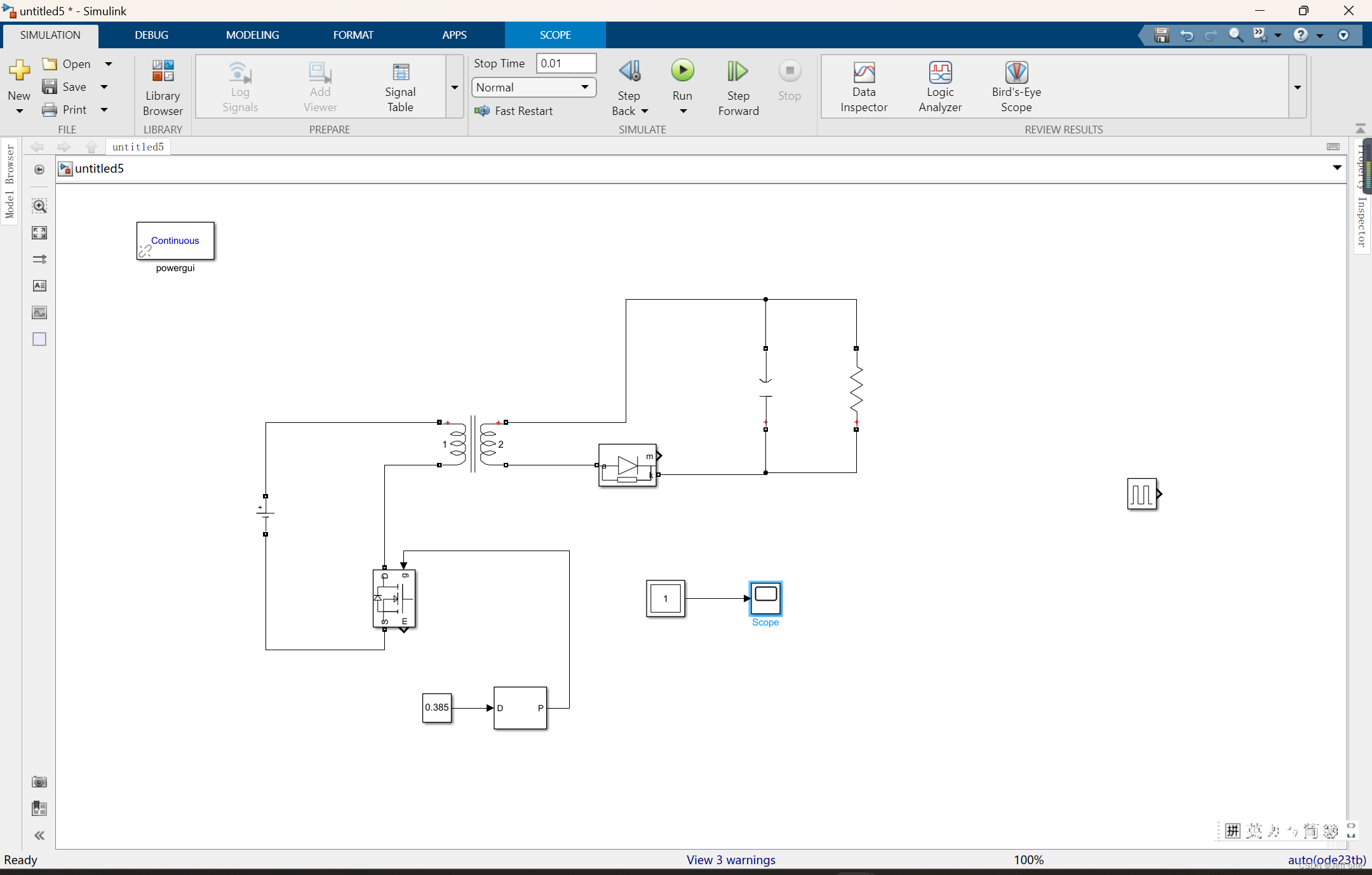

把仿真变成离散的。
最大步长设置方法:如果是对于相控形式的电路,我觉得设置1e-4秒大概就够了,如果是对于斩波形式的电路,设置1e-6或者更小的秒数就够了。

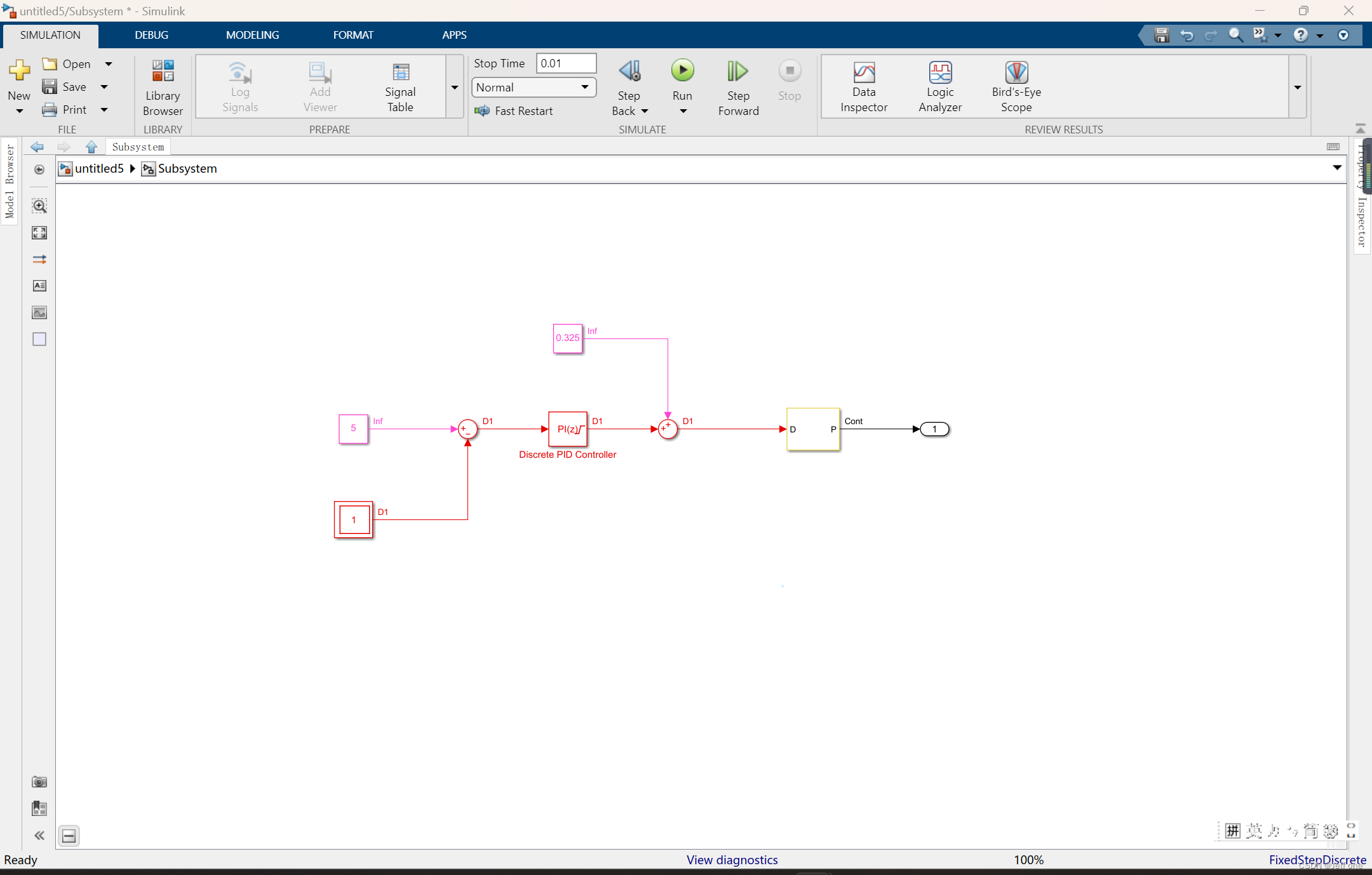

控制是与开关频率是有关系的。

这个是控制的周期。
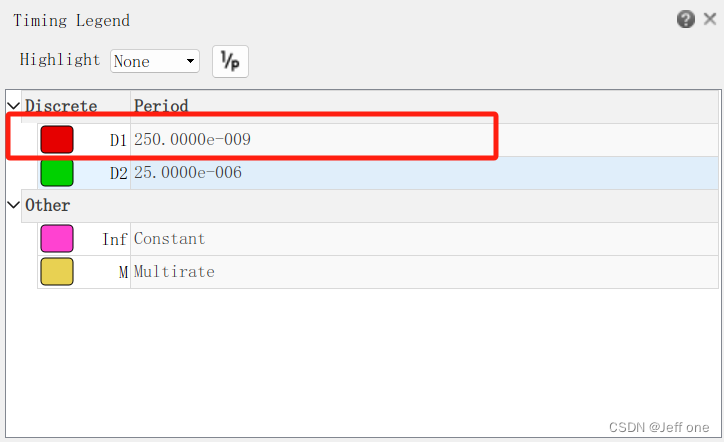
这个是系统的最小仿真步长。

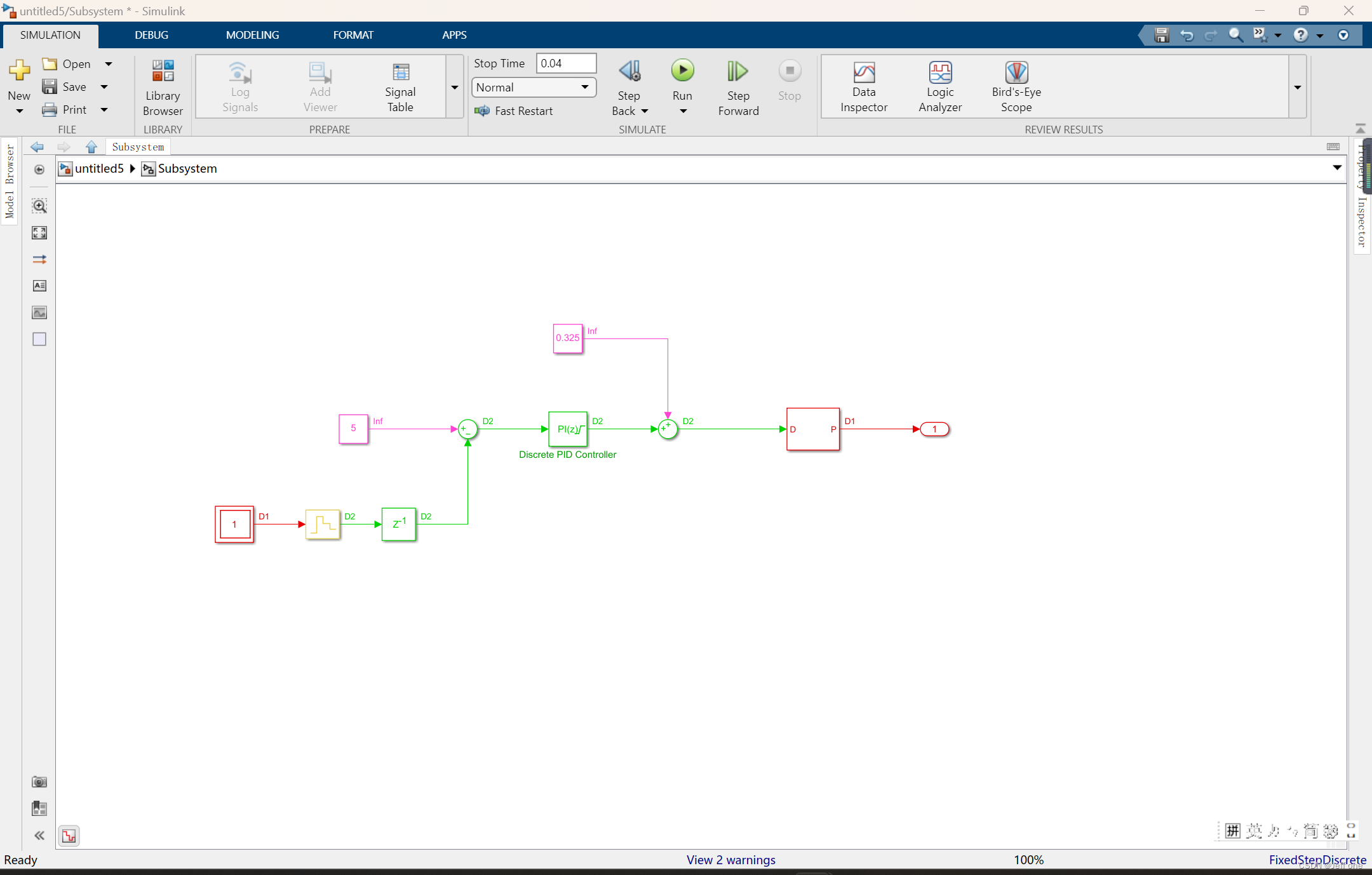
单端反激(离散系统仿真)
指令电压为0,电机微速旋转,补足指令电压。
把仿真变成离散的。
最大步长设置方法:如果是对于相控形式的电路,我觉得设置1e-4秒大概就够了,如果是对于斩波形式的电路,设置1e-6或者更小的秒数就够了。
控制是与开关频率是有关系的。
这个是控制的周期。
这个是系统的最小仿真步长。