- 💡统一使用 YOLOv5 代码框架,结合不同模块来构建不同的YOLO目标检测模型。
- 🌟本项目包含大量的改进方式,降低改进难度,改进点包含
【Backbone特征主干】、【Neck特征融合】、【Head检测头】、【注意力机制】、【IoU损失函数】、【NMS】、【Loss计算方式】、【自注意力机制】、【数据增强部分】、【标签分配策略】、【激活函数】等各个部分。
本篇是《增加一个Swin检测头结构🚀》的代码演示
最新创新点改进博客推荐
(🔥 博客内 附有多种模型改进方式,均适用于YOLOv5系列 以及 YOLOv7系列 改进!!!)
-
💡🎈☁️:改进YOLOv7系列:首发最新结合多种X-Transformer结构新增小目标检测层,让YOLO目标检测任务中的小目标无处遁形
-
💡🎈☁️:改进YOLOv7系列:结合Adaptively Spatial Feature Fusion自适应空间特征融合结构,提高特征尺度不变性
-
💡🎈☁️:改进YOLOv5系列:首发结合最新Extended efficient Layer Aggregation Networks结构,高效的聚合网络设计,提升性能
-
💡🎈☁️:改进YOLOv7系列:首发结合最新CSPNeXt主干结构(适用YOLOv7),高性能,低延时的单阶段目标检测器主干,通过COCO数据集验证高效涨点
-
💡🎈☁️:改进YOLOv7系列:最新结合DO-DConv卷积、Slim范式提高性能涨点,打造高性能检测器
-
💡🎈☁️:改进YOLOv7系列:结合最新即插即用的动态卷积ODConv
-
💡🎈☁️:改进YOLOv7系列:首发结合最新Transformer视觉模型MOAT结构:交替移动卷积和注意力带来强大的Transformer视觉模型,超强的提升
-
💡🎈☁️:改进YOLOv7系列:首发结合最新Centralized Feature Pyramid集中特征金字塔,通过COCO数据集验证强势涨点
-
💡🎈☁️:改进YOLOv7系列:首发结合 RepLKNet 构建 最新 RepLKDeXt 结构|CVPR2022 超大卷积核, 越大越暴力,大到31x31, 涨点高效
-
💡🎈☁️:改进YOLOv5系列:4.YOLOv5_最新MobileOne结构换Backbone修改,超轻量型架构,移动端仅需1ms推理!苹果最新移动端高效主干网络
-
💡🎈☁️:改进YOLOv7系列:最新HorNet结合YOLOv7应用! | 新增 HorBc结构,多种搭配,即插即用 | Backbone主干、递归门控卷积的高效高阶空间交互
文章目录
- 最新创新点改进博客推荐
- YOLOv5网络
- 1.YOLOv5s标准网络配置
- 2.增加Swin Transformer小目标检测头配置
- 3.核心代码
- 4.运行
YOLOv5网络
1.YOLOv5s标准网络配置
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
2.增加Swin Transformer小目标检测头配置
增加yolov5s6_swin.yaml文件
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [19,27, 44,40, 38,94] # P3/8
- [96,68, 86,152, 180,137] # P4/16
- [140,301, 303,264, 238,542] # P5/32
- [436,615, 739,380, 925,792] # P6/64
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [768, 3, 2]], # 7-P5/32
[-1, 3, C3, [768]],
[-1, 1, Conv, [1024, 3, 2]], # 9-P6/64
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 11
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [768, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 8], 1, Concat, [1]], # cat backbone P5
[-1, 3, C3, [768, False]], # 15
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 19
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 23 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 20], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 26 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 16], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [768, False]], # 29 (P5/32-large)
[-1, 1, Conv, [768, 3, 2]],
[[-1, 12], 1, Concat, [1]], # cat head P6
[-1, 3, C3STR, [512]], # 32 (P6/64-xlarge)
[[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
]
3.核心代码
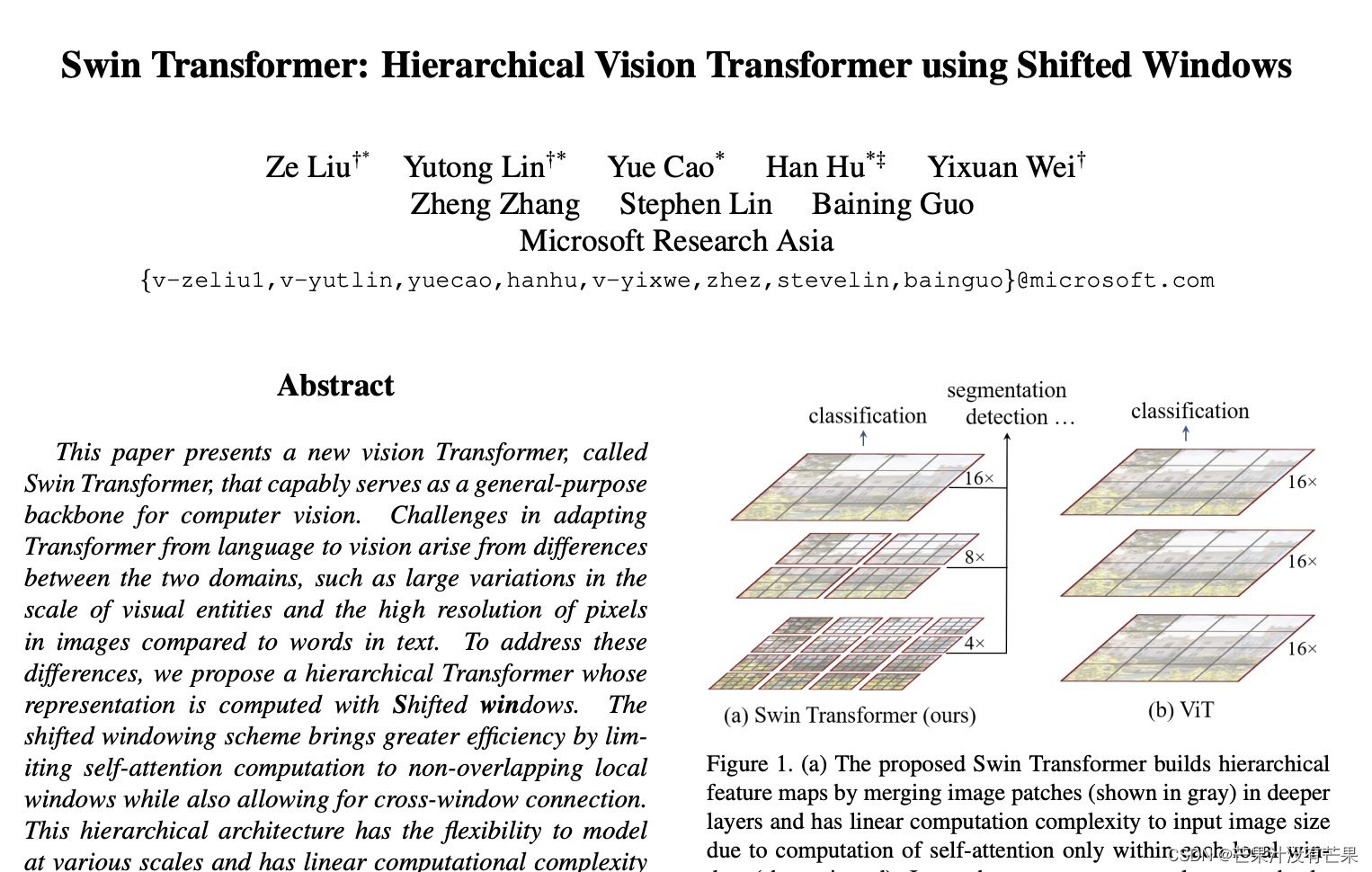
参考本博主的这篇:👉改进YOLOv5系列:3.YOLOv5结合Swin Transformer结构,ICCV 2021最佳论文 使用 Shifted Windows 的分层视觉转换器
里面的common.py配置部分
class SwinTransformerBlock(nn.Module):
def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
super().__init__()
self.conv = None
if c1 != c2:
self.conv = Conv(c1, c2)
# remove input_resolution
self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
def forward(self, x):
if self.conv is not None:
x = self.conv(x)
x = self.blocks(x)
return x
class WindowAttention(nn.Module):
def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim
self.window_size = window_size # Wh, Ww
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
# define a parameter table of relative position bias
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
# get pair-wise relative position index for each token inside the window
coords_h = torch.arange(self.window_size[0])
coords_w = torch.arange(self.window_size[1])
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
self.register_buffer("relative_position_index", relative_position_index)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
nn.init.normal_(self.relative_position_bias_table, std=.02)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask=None):
B_, N, C = x.shape
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
q = q * self.scale
attn = (q @ k.transpose(-2, -1))
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
attn = attn + relative_position_bias.unsqueeze(0)
if mask is not None:
nW = mask.shape[0]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
# print(attn.dtype, v.dtype)
try:
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
except:
#print(attn.dtype, v.dtype)
x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class SwinTransformerLayer(nn.Module):
def __init__(self, dim, num_heads, window_size=8, shift_size=0,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
super().__init__()
self.dim = dim
self.num_heads = num_heads
self.window_size = window_size
self.shift_size = shift_size
self.mlp_ratio = mlp_ratio
# if min(self.input_resolution) <= self.window_size:
# # if window size is larger than input resolution, we don't partition windows
# self.shift_size = 0
# self.window_size = min(self.input_resolution)
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
self.norm1 = norm_layer(dim)
self.attn = WindowAttention(
dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def create_mask(self, H, W):
# calculate attention mask for SW-MSA
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_mask
def forward(self, x):
# reshape x[b c h w] to x[b l c]
_, _, H_, W_ = x.shape
Padding = False
if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
Padding = True
# print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
pad_r = (self.window_size - W_ % self.window_size) % self.window_size
pad_b = (self.window_size - H_ % self.window_size) % self.window_size
x = F.pad(x, (0, pad_r, 0, pad_b))
# print('2', x.shape)
B, C, H, W = x.shape
L = H * W
x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
# create mask from init to forward
if self.shift_size > 0:
attn_mask = self.create_mask(H, W).to(x.device)
else:
attn_mask = None
shortcut = x
x = self.norm1(x)
x = x.view(B, H, W, C)
# cyclic shift
if self.shift_size > 0:
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
else:
shifted_x = x
# partition windows
x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
# W-MSA/SW-MSA
attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
# merge windows
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
# reverse cyclic shift
if self.shift_size > 0:
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
else:
x = shifted_x
x = x.view(B, H * W, C)
# FFN
x = shortcut + self.drop_path(x)
x = x + self.drop_path(self.mlp(self.norm2(x)))
x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
if Padding:
x = x[:, :, :H_, :W_] # reverse padding
return x
class C3STR(C3):
# C3 module with SwinTransformerBlock()
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, c2, n, shortcut, g, e)
c_ = int(c2 * e)
num_heads = c_ // 32
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
4.运行
python train.py --cfg yolov5s6_swin.yaml