图论
github
装饰器
husky
程序猿
npm
kinect
globalmapper
逻辑运算
storm
脚本实战
三星线刷
计算机软件考试
safari
工业互联网
3D实例分割
BeautifulSoup库
mq
Async注解失效
MobaXterm终端神器
数码相机
2024/4/12 3:54:36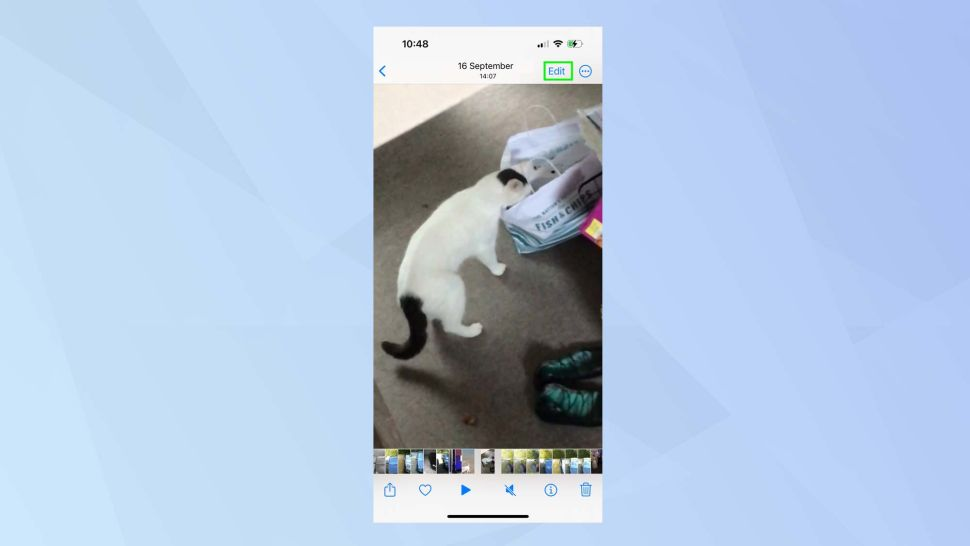
编辑视频无需第三方软件,在iPhone上也可以轻松编辑视频
如果你学会了如何在iPhone上编辑视频,你可以在很大程度上把匆忙拍摄的视频变成适合好莱坞的视频。好吧,也许这有点夸张了,但至少,你可以通过使用照片应用程序中的编辑工具,让你的视频看起来更令人印象深刻。
虽然它不一定能与最好的视频编辑软件相匹配,但它仍然非常适合…

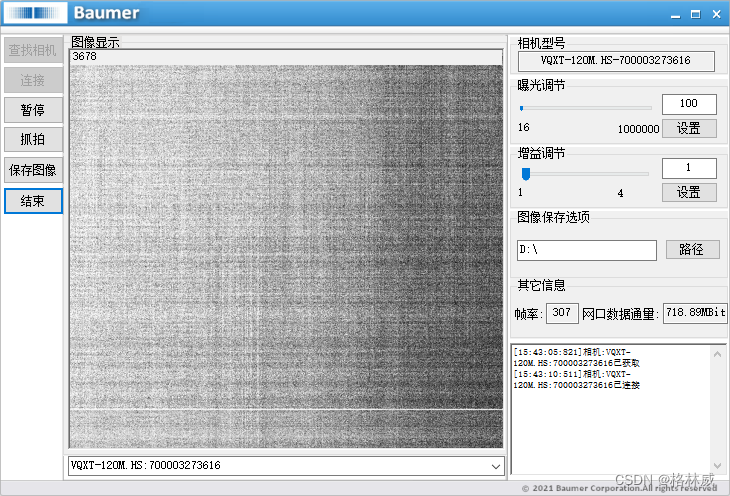
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C) Baumer工业相机Baumer工业相机的掉线自动重连的技术背景通过PnP事件函数检查Baumer工业相机是否掉线在NEOAPI SDK里实现相机掉线重连方法:工业相机掉线重连测试演示图 …

关于camera的OTP/EEPROM的学习
转载一篇博客: OTP/EEPROM 读取与处理_camera otp的值全为0-CSDN博客
OTP的作用是什么?_get_soc_otp代码意思-CSDN博客
关于摄像头模组中OTP配置概述_otp烧录的信息包括_木 东的博客-CSDN博客
【OTP入门指南】_otp编程_千北的博客-CSDN博客

Qt 基于海康相机的视频绘图
需求
在视频窗口上进行绘图,包括圆,矩形,扇形等
效果: 思路:
自己取图然后转成QImage ,再向QWidget 进行渲染,根据以往的经验,无法达到很高的帧率。因此决定使用相机SDK自带的渲染…
点云从入门到精通技术详解100篇-基于车载激光点云的道路标线提取及分类方法
目录
前言
车载 LiDAR 技术基础理论
2.1 车载 LiDAR 系统组成
2.2 车载 LiDAR 系统工作原理
zed2i相机内参标定
参考:
https://blog.csdn.net/yanpeng_love/article/details/107166922 https://blog.csdn.net/weixin_41954990/article/details/127928852
参考以上连接先安装kalibr。
注意:
python包装不上,换成:pip install出现pyx找不到…
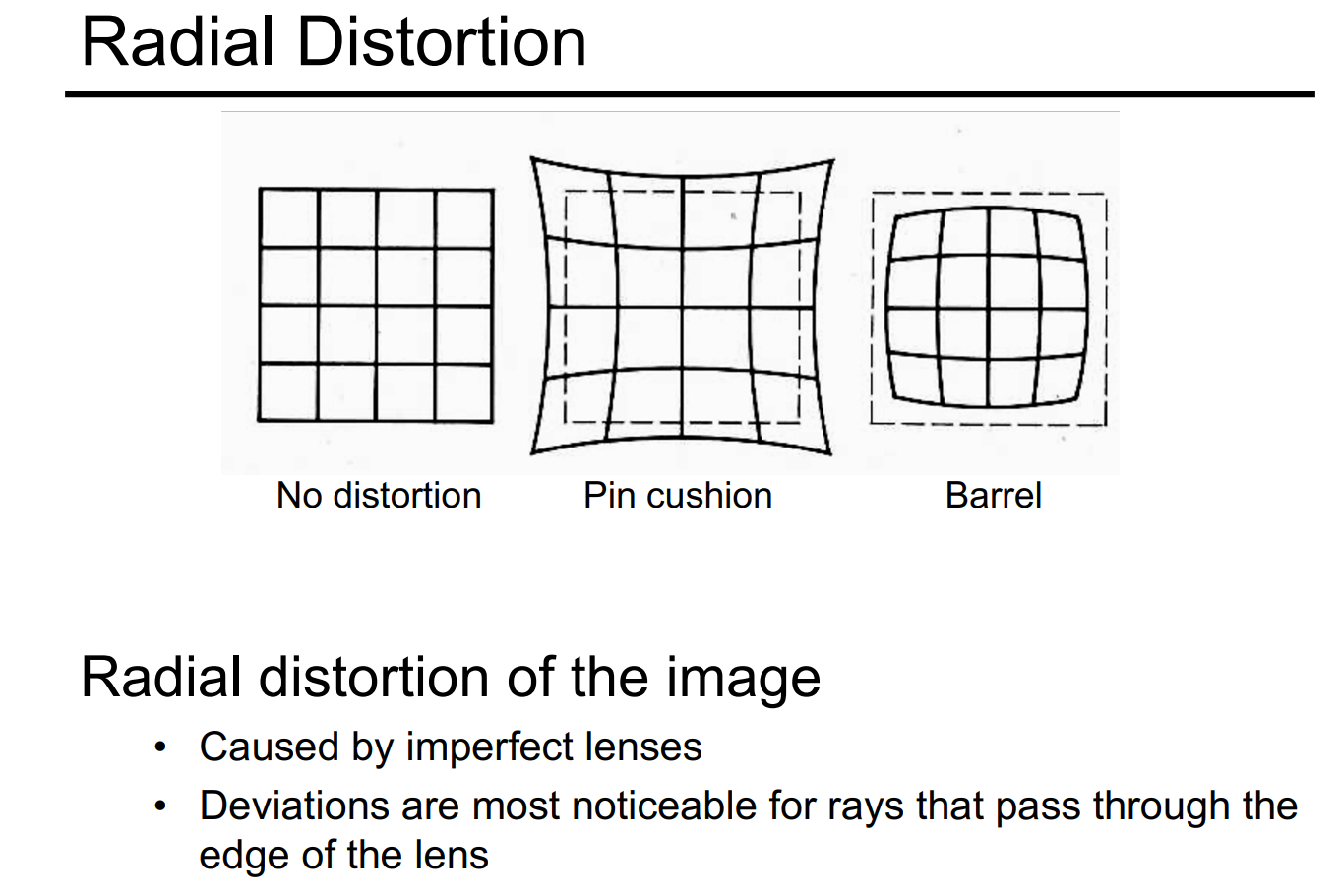
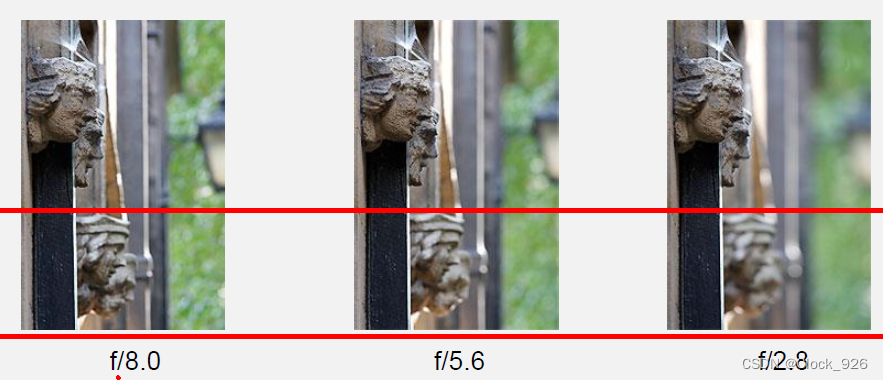
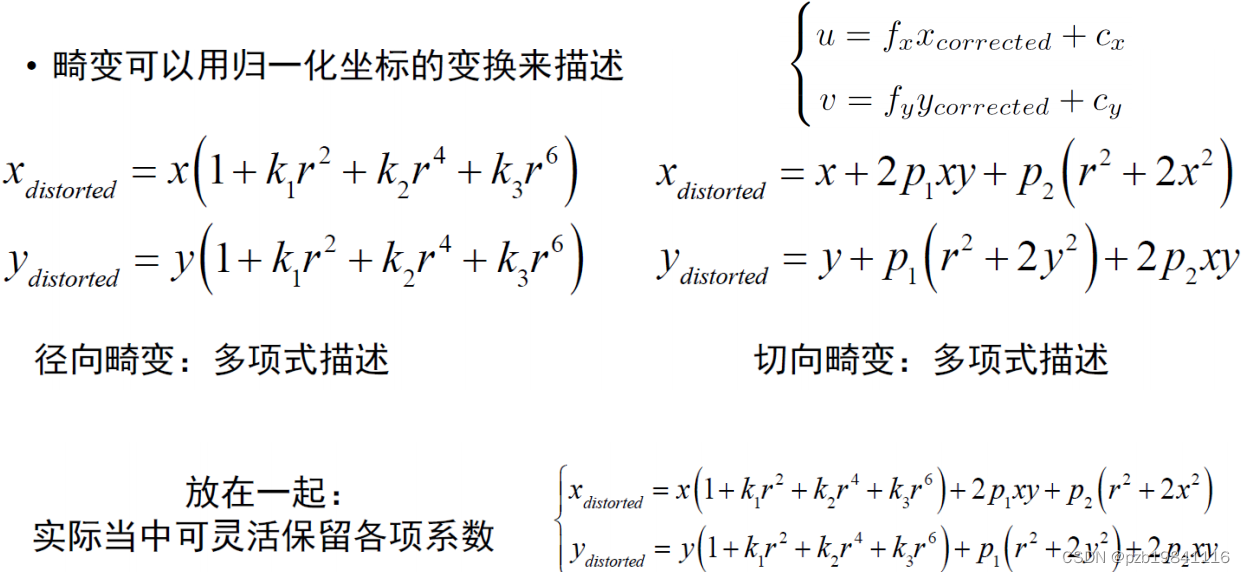
十.镜头知识之畸变问题
十.镜头知识之畸变问题 文章目录 十.镜头知识之畸变问题**10.0 Distortion 畸变**10.1 畸变定义10.2 畸变分类10.2.1径向畸变之桶形畸变10.2.2径向畸变之枕形畸变(Pincushion Distortion)10.2.2 切向畸变10.3 畸变产生的原因10.3.1 光圈10.3.2 放大倍率10.3.3 镜头畸变的曲线…
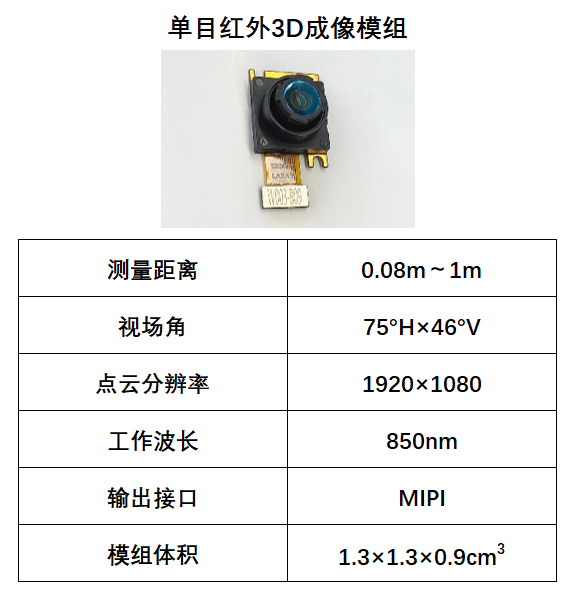
以单颗CMOS摄像头重构三维场景,维悟光子发布单目红外3D成像模组
维悟光子近期发布全新单目红外3D成像模组,现可提供下游用户进行测试导入。通过结合微纳光学元件编码和人工智能算法解码,维悟光子单目红外3D成像模组采用单颗摄像头,通过单帧拍摄,可同时获取像素级配准的3D点云和红外图像信息,可被应用于机器人、生物识别等广阔领域。 市场…
经典文献阅读之--Calib Anything(使用SAM的无训练标定雷达相机外参)
0. 简介
Camera与LiDAR之间的外部标定研究正朝着更精确、更自动、更通用的方向发展,由于很多方法在标定中采用了深度学习,因此大大减少了对场景的限制。然而,数据驱动方法具有传输能力低的缺点。除非进行额外的训练,否则它无法适…
Android SurfaceView预览相机黑屏问题解决方案
解决方案 1、使用动态添加的方式添加surfaceView 在xml文件中添加FrameLayout
<FrameLayoutandroid:id"id/colorsurface"android:layout_width"match_parent"android:layout_height"match_parent" />
2.创建SurfaceView并添加到FrameL…
聚乙烯PE的特性有哪些?UV胶水能够粘接聚乙烯PE吗?
聚乙烯(Polyethylene,PE)是一种聚合物,是由乙烯(ethylene)单体通过聚合反应形成的合成塑料。以下是聚乙烯的一些主要化学特性: 1.化学式: 聚乙烯的基本化学式是 (C2H4)n,…
opencv C++ 张正友相机标定
//张正友相机标定
//https://blog.csdn.net/u010925447/article/details/77997735
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
机器视觉常见的问题及解决
应该怎样选择相机?
选择相机却往往刻不容缓的的问题摆在机器视觉工程师面前,因此,选择相机了解以下几个方面问题: 通常您首先需要知道系统精度要求和相机分辨率,可以通过公式:X方向系统精度(X方…

搜维尔科技:Faceware面部捕捉最佳实践!
视频源和分辨率: 我们的软件针对 RGB 彩色素材进行了优化,不支持使用红外摄像机。 我们建议视频分辨率为 720p 和 1080p。低于 720p 的分辨率可能会对跟踪质量产生负面影响,而高于 1080p 的分辨率会导致存储要求和传输时间增加,而…

大势智慧软硬件技术答疑第一期
1.重建大师生成的实景三维模型,模型周边的道路植物被压平了,怎么保留植物道路原有形状? 答:这个是单体化生成的地理实体场景,会把地物压平,可以用模方将单体化的模型加入到osgb中。 2.直接导入空三的话这个…
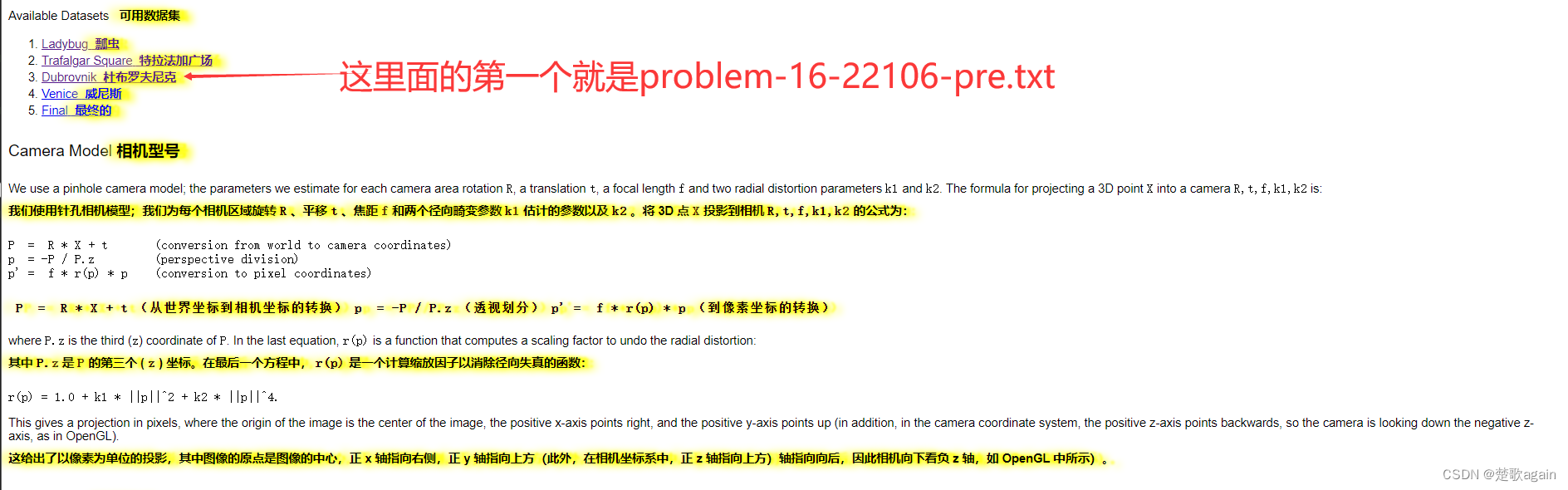
【SLAM十四讲-9.3 实践Ceres BA-BAL数据集problem-16-22106-pre.txt分析】
数据集Dubrovnik Dataset 杜布罗夫尼克数据集的链接:Bundle Adjustment in the Large https://grail.cs.washington.edu/projects/bal/
problem-16-22106-pre.txt.bz216 22106 83718(这里是第1行)
0 0 -3.859900e02 3.871200e02&#x…

十四.镜头知识之镜头色差
十四.镜头知识之镜头色差 文章目录 十四.镜头知识之镜头色差**14.1 色差** /Chromatic Aberration/**14.2 纵向色差****14.3 横向色差**14.4 ISP色彩还原同一场景两张由不同镜头拍出来的照片比较:上方的照片来自更高质量的镜头,下方的照片则出现了明显的色差,特别是在房顶右…
工业相机丢包排查步骤
机器视觉康耐视智能相机Insight-缺失外观检测 第一步:检查PC环境设置
l巨型帧/巨帧数据包是否已经设置成9KB,巨型帧在“本地连接->属性->配置->高级”的界面中 效果验证:如之前未配置9KB,请配置9KB后验证效果
l请确认现场电脑上是否有360安全卫士、360杀毒软件等…

MTK 相机功耗分析流程
和你一起终身学习,这里是程序员Android 经典好文推荐,通过阅读本文,您将收获以下知识点: 一、硬件功耗二、相机软件功耗三、参考文档 一、硬件功耗 1.1 硬件信息 以下硬件信息最好提前获取到 模块备注平台MTK or Qcom or sprdCPU频率大中小核…

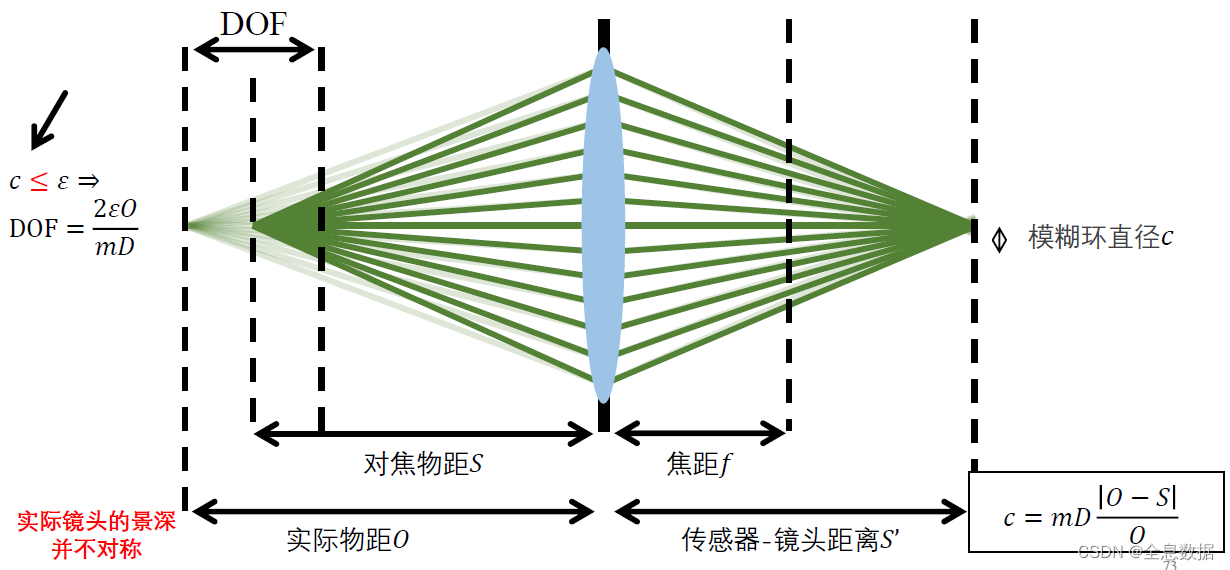
十六.镜头知识之工业镜头的质量判断因素
十六.镜头知识之工业镜头的质量判断因素 文章目录 十六.镜头知识之工业镜头的质量判断因素1.分辨率(Resolution)2.明锐度(Acutance)3.景深(DOF):4. 最大相对孔径与光圈系数5.工业镜头各参数间的相互影响关系5.1.焦距大小的影响情况5.2.光圈大小的影响情况5.3.像场中…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机图像转换由Mono10转换为Mono8(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机图像转换由Mono10转换为Mono8(C) Baumer工业相机Baumer工业相机的Mono10转换为Mono8图的技术背景在NEOAPI SDK里实现相机图像由Mono10转换为Mono8格式 工业相机通过NEOAPI SDK实现相机图像转换的优…

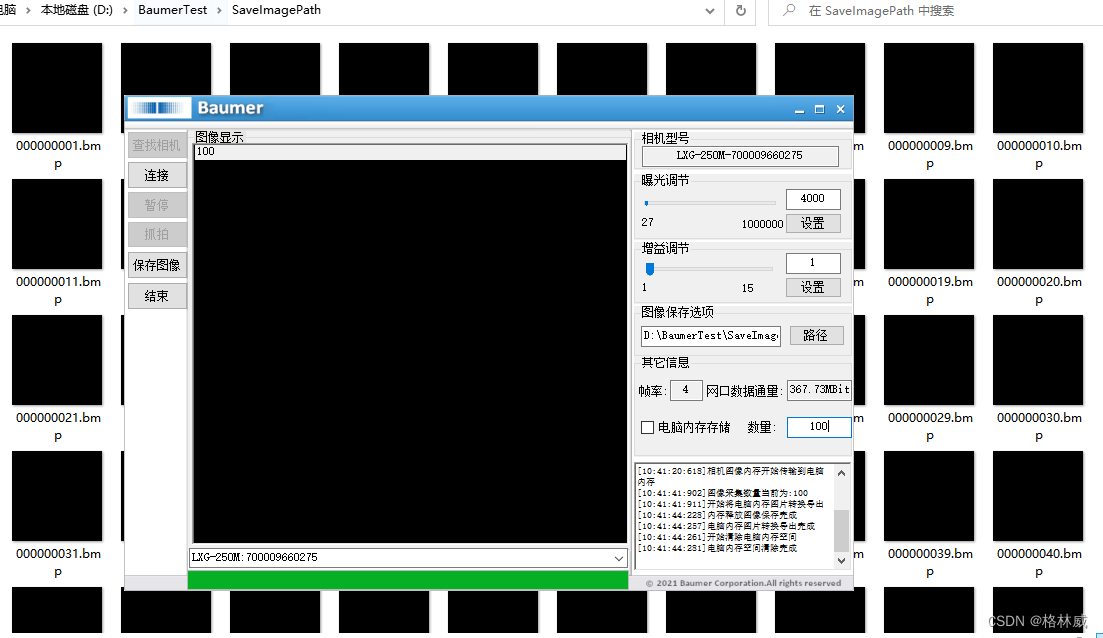
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机的高速图像保存(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机的高速图像保存(C)) Baumer工业相机Baumer工业相机的图像高速保存的技术背景Baumer工业相机通过NEOAPI SDK函数图像高速保存在NEOAPI SDK里实现线程高速图像保存:工业相机高…

UV胶水与聚氯乙烯PVC材料的塑料粘接,效果如何?
UV胶水可以与聚氯乙烯PVC很好地粘接。
PVC是一种常见的塑料材料,UV胶水通常对PVC具有良好的粘接性能。UV胶水可以在紫外线照射下迅速固化,形成坚固的粘接,因此通常被用于PVC制品的粘接和修复。 UV胶水与PVC粘接的优点:
1. 快速固…

Baumer工业相机堡盟相机如何使用NEOAPI SDK实现相机的连接(C++)
Baumer工业相机堡盟相机如何使用NEOAPI SDK实现相机的连接(C) Baumer工业相机Baumer工业相机SDK技术背景代码分析第一步:先使用NEOAPI函数查找相机第二步:连接相机后对相机进行采图第三步:将采集的图像显示在UI界面上 …
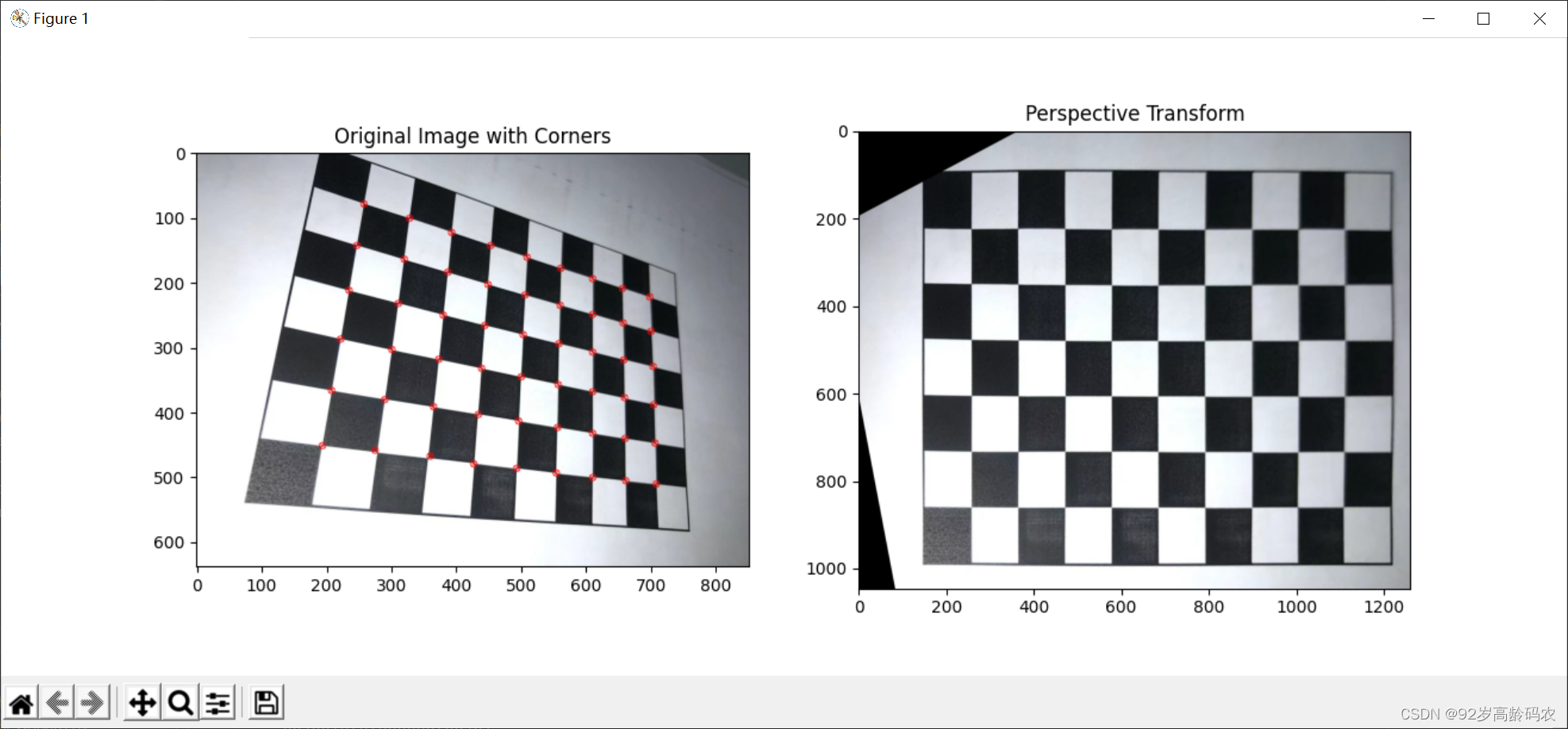
OpenCV C++ 张正友相机标定【相机标定原理、相机标定流程、图像畸变矫正】
文章目录 3.1 标定原理3.2 相机标定流程步骤1:采集棋盘格图像,批处理(调整尺寸、重命名)步骤2:提取棋盘格内角点坐标步骤3:进一步提取亚像素角点信息在棋盘标定图上绘制找到的内角点(非必须,仅为了显示)步骤4:相机标定--计算出相机内参数矩阵和畸变系数步骤5:畸变图像…
机器视觉在OCR字符检测的应用
在产品质量 检测过程中,对于字符、条码等标识信息的识别、读取、检测是非常重要的一部分,比如在食品饮料包装检测中,生产日期 、保质期 、生产批号 、条码等字符信息是产品管理和追溯必不可缺的,因此利用机器视觉技术进行OCR字符采…
Android相机-架构2
应用:
大概流程:open,创建session,发送request,得到captureresult CameraManager,获取系统服务CameraService,打开相机:
1)openCamera:打开相机 获取相…
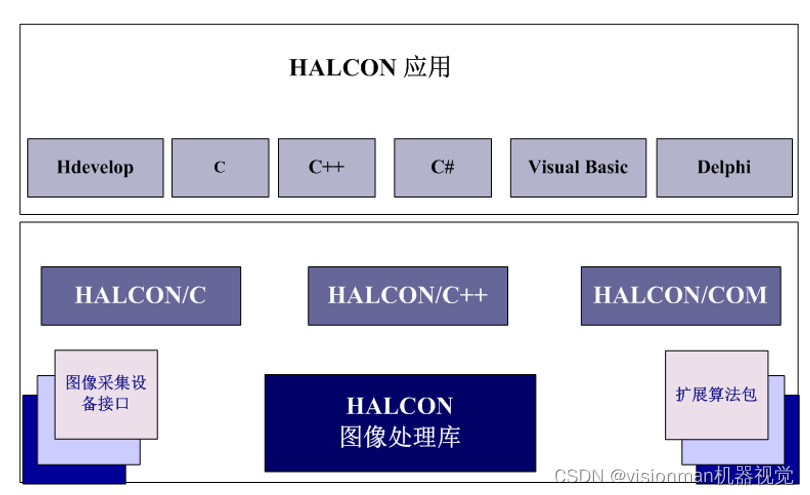
视觉人培训团队把它称之为,工业领域人类最伟大的软件创造,它的名字叫Halcon
目前为止,世界上综合能力强大的机器视觉软件,,它的名字叫Halcon。
视觉人培训团队把它称之为,工业领域人类最伟大的软件创造,它的名字叫Halcon。
持续不断更新最新的图像技术,软件综合能力持续提升。
综…
Android Camere开发入门(1):初识Camera
Android Camere开发入门(1):初识Camera 初步了解 在Android开发中,相机(Camera)是一个常见而重要的功能模块。它允许我们通过设备的摄像头捕捉照片和录制视频,为我们的应用程序增加图像处理和视觉交互的能力。
随着Android系统的不断发展和更新,相机功能也不断改进和增…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK转换和显示偏振相机的图像(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK转换和显示偏振相机的图像(C) Baumer工业相机Baumer工业相机的偏振相机的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示偏振相机的图像1.引用合适的类文件2.Baumer工业相机在BufferEvent转换并显示偏…
赛尔航测管家:航飞数据管理专家
**
智能引领航测未来
** 航测作为地表信息获取的重要手段,其高效性和全面性使其在城市规划、土地管理等领域发挥着重要作用。然而,面对数据处理的繁琐和设备管理的挑战,深圳赛尔智控推出的赛尔航测管家成为航测领域的智能助手,引…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK修改图像像素格式Mono8或者Mono10(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK修改图像像素格式Mono8或者Mono10(C) Baumer工业相机Baumer工业相机的图像像素格式的技术背景CameraExplorer如何查看修改相机图像像素格式信息在NEOAPI SDK里通过函数修改图像像素格式修改像素格式测试演示…
了解图像工程与数字图像处理的关系
数字图像处理,是用计算机对图像进行处理和分析,以达到所需结果的技术,又称数字图像处理。数字图像是指用工业相机、摄像机、扫描仪等设备经过拍摄、扫描得到的二维数组,该数组的元素称为像素,像素的值称为灰度值。数字…
Android相机-HAL子系统
引言 应用框架要通过拍照预览摄像获得照片或者视频,就需要向相机子系统发出请求, 一个请求对应一组结果 一次可发起多个请求,并且提交请求是非阻塞的,始终按照接收的顺序以队列的形式先进先出地进行顺序处理 一个请求包含了拍摄和拍照配置的所有信息&…
TDI(Time Delay Integration)
TDI(Time Delay Integration)是一种特殊的图像采集技术,常用于线阵CCD(Charge-Coupled Device)相机。TDI技术可以在保持高分辨率的同时增强图像的信噪比(Signal-to-Noise Ratio, SNR)࿰…
three.js 写一个地球
你可以使用 three.js 创建一个地球的方式如下: 创建一个场景 (Scene),场景中是你要渲染的对象。创建一个相机 (Camera),相机观察场景中的对象。创建一个渲染器 (Renderer),渲染器渲染场景中的对象并将结果显示在浏览器中。创建一个…
three.js相机调用reset方法复原但无法完全复原
目录
一、问题
二、原因
三、总结 一、问题
需求:经过多次旋转、平移等变换后,希望恢复到初次渲染的角度、位置。结果发现: three.js oribtControls调用 一次reset方法 无法完全复原;需要多次调用后才能复原。 this.orbitControls.reset…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C#) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在NEOAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过NEOAPI SDK设置相机固…
相机以及其它传感器传感器
深度相机点云质量对比 比较点云质量时需要注意的点: 1.对特殊材质、颜色的检测效果:透明塑料、金属、毛玻璃、高反光物体(镜子、水坑)、吸光物体(黑色物体)。 2.特殊环境:雨、雪、雾、明暗交替位…
Baumer工业相机堡盟相机如何通过BGAPI SDK获取相机的IP地址和相机连接的网口IP地址(C#)
Baumer工业相机堡盟相机如何通过BGAPI SDK获取相机的IP地址和相机连接的网口IP地址(C#)Baumer工业相机Baumer工业相机技术背景代码分享获取工业相机IP地址的用处获取工业相机连接网口IP地址的用处#勤写标兵挑战赛#Baumer工业相机
Baumer工业相机堡盟相…
从零实战SLAM-第七课(多视角几何)
在七月算法报的班,老师讲的蛮好。好记性不如烂笔头,关键内容还是记录一下吧,课程入口,感兴趣的同学可以学习一下。
--------------------------------------------------------------------------------------------------------…
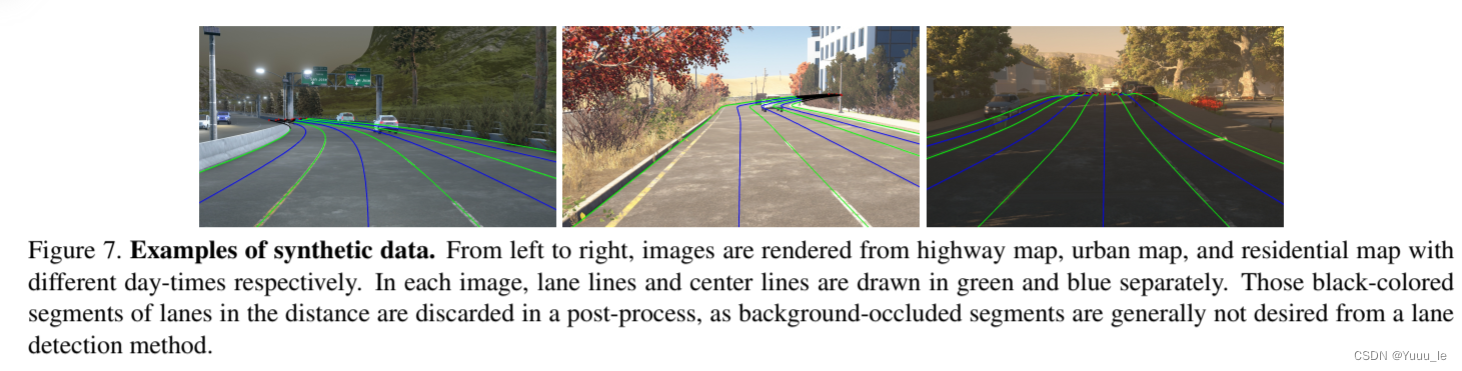
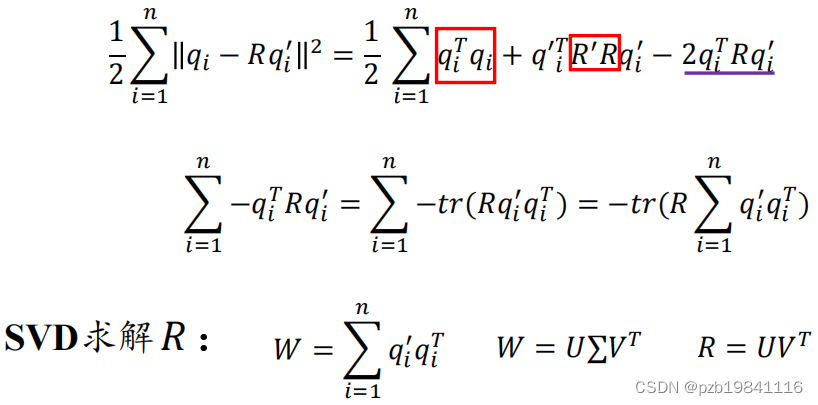
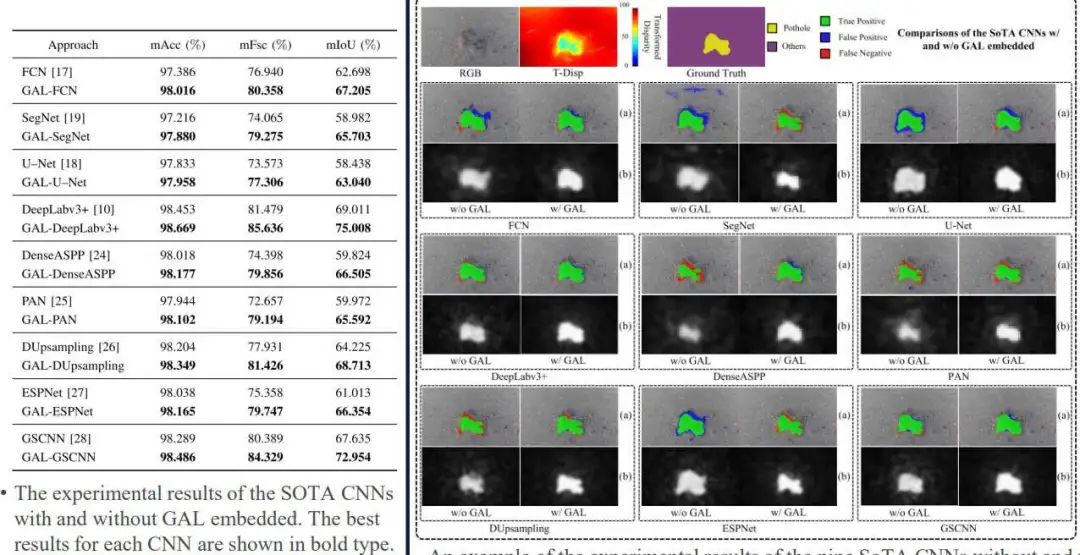
Gen-LaneNet论文精读总结
Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection 文章目录Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection1. 本文解决问题2. 实现方法(Method)2.1 基于几何关系的anchor表示2.2 网络和训练3. Synthetic dataset & 实验…
【相机标定】opencv python 标定相机内参时不计算 k3 畸变参数
文章目录 1. 背景2. 完整的 opencv python 标定相机内参过程3. 选择是否计算畸变参数 k3 1. 背景
畸变参数 k3 通常用于描述径向畸变的更高阶效应,即在需要高精度的应用中可以用到,一般的应用中 k1, k2 足矣。 常见的应用中, orbslam3 中是否…
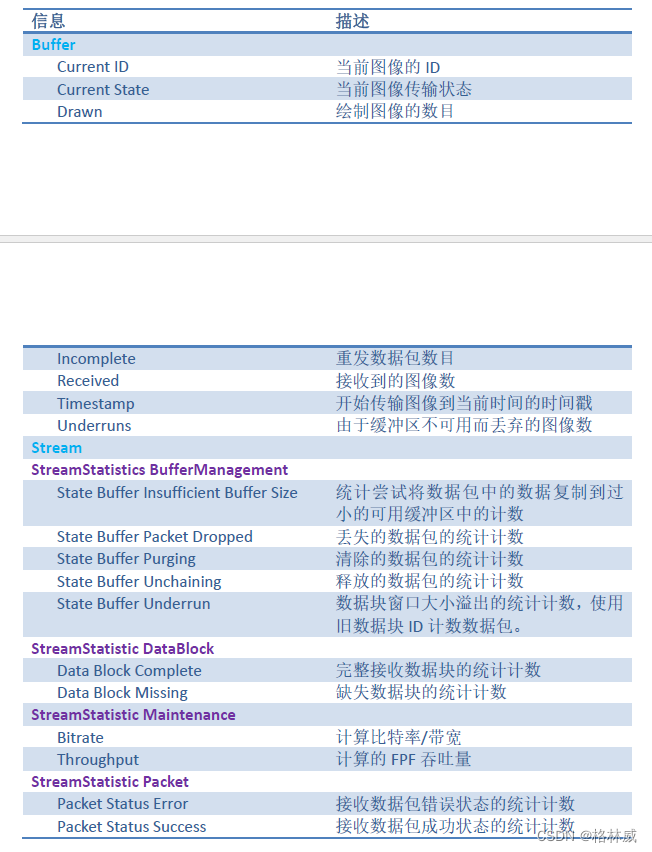
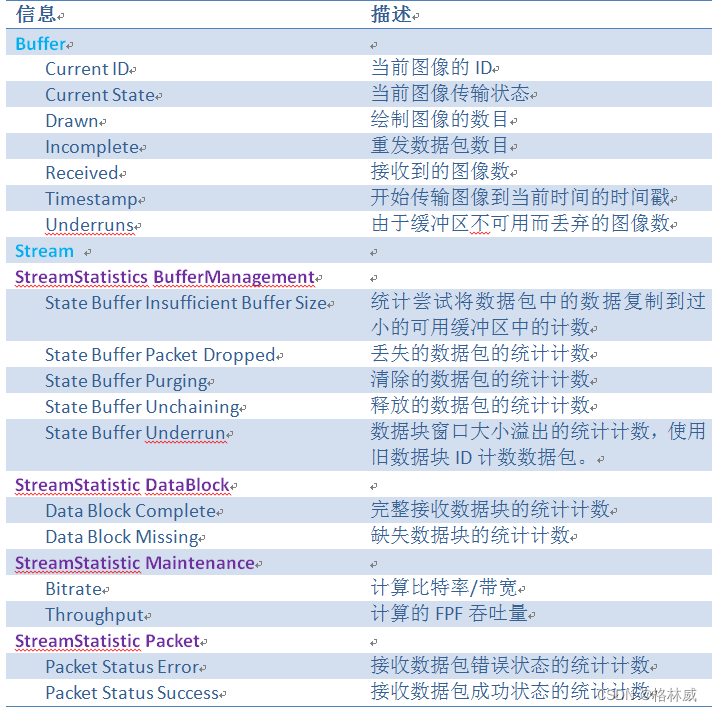
Baumer工业相机堡盟相机如何使用CameraExplorer查看相机图像Buffer以及图像数据传输流统计信息
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为AVI视频格式(C#)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为视频格式(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的图像的技术背景在NEOAPI SDK里实现相机图像转换为视频格式 工业相机通过OpenCV实现相机图像转换为视频格式的优…

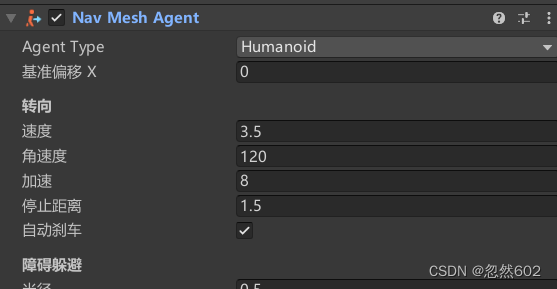
Unity丨移动相机朝向目标并确定目标在摄像机可视范围内丨摄像机注释模型丨摄像机移动丨不同尺寸模型优化丨
文章目录 问题描述功能展示技术细节小结 问题描述
本文提供的功能是摄像机朝向目标移动,并确定整个目标出现在摄像机视角内,针对不同尺寸的模型优化。
功能展示 提示:这里可以添加技术名词解释
技术细节
直接上代码
using UnityEngine;…

2023五岳杯量子计算挑战赛数学建模思路+代码+模型+论文
目录
计算力网络(CPN)是一种新型的信息基础设施,完整论文代码见文末
问题描述
2.1 问题1
2.2 问题2
2.3 问题3 问题1的解答过程:
问题3的解答过程:
决策优化应用场景:人工智能模型超参数调优
背景信…
OpenCV快速入门:相机标定——单目视觉和双目视觉
文章目录 前言一、相机标定的基本原理1.1 相机模型与坐标系1.1.1 相机模型1.1.2 坐标系 1.2 相机内参与外参1.2.1 内部参数1.2.2 外部参数 1.3 镜头畸变1.4 透视变换1.5 标定的重要性和应用场景 二、单目视觉2.1 单目视觉的原理2.1.1 单目视觉的原理2.1.2 单目视觉的公式2.1.3 …

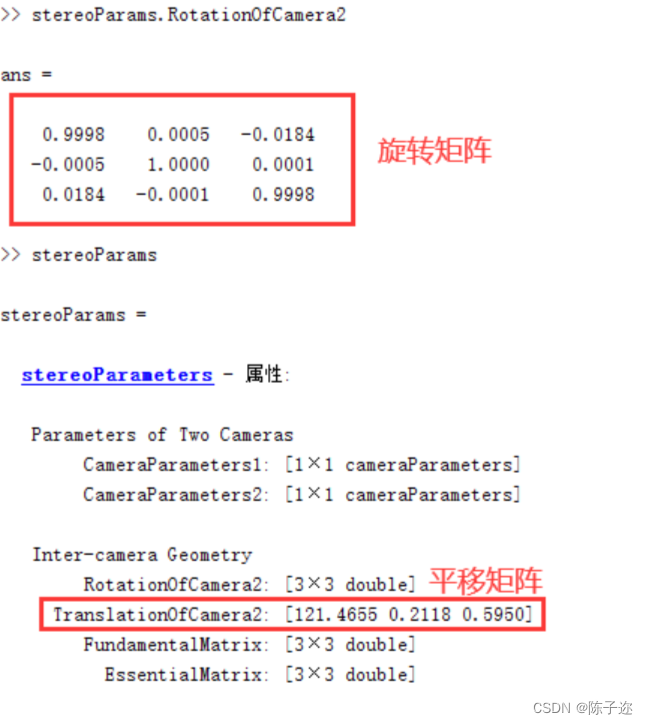
【机器视觉4】双目立体视觉标定
双目立体视觉标定的目的是标定左、右两个摄像机之间的坐标转换关系。
双目立体视觉的标定过程:采用MATLAB图像处理和计算机视觉库中的 Stereo Camera Calibrator(SCC)来标定双目立体视觉系统中左、右摄像机并获得左右摄像机的内参矩阵 M 1 M_1 M1、 M 2 M_2 M2…
Android相机-架构
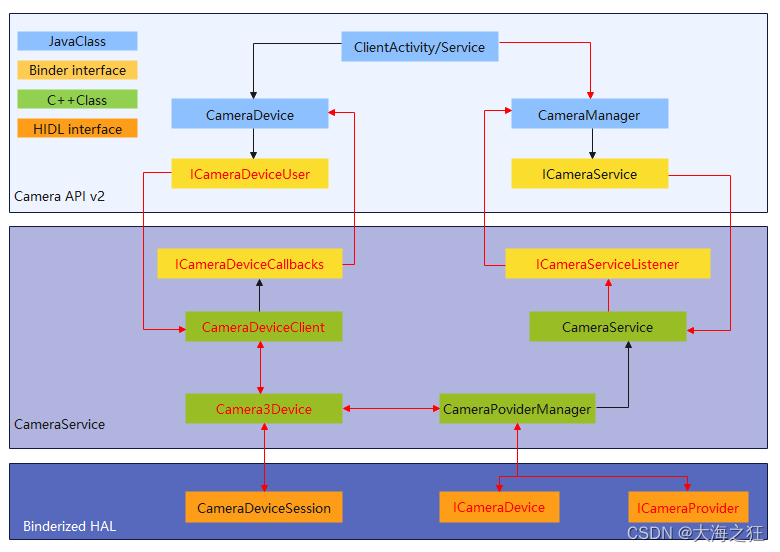
引言: 主要是针对CameraAPI v2 HAL3的架构对Android相机系统进行梳理。 相机架构 App和FrameWork Camera API v2位于: packages/apps/Camer2 frameworks/ex/camera2 应用框架级别,使用Camera2 API与相机的硬件进行交互。通过调用Binder接口…

大师学SwiftUI第18章Part1 - 图片选择器和相机
如今,个人设备主要用于处理图片、视频和声音,苹果的设备也不例外。SwiftUI可以通过Image视图显示图片,但需要其它框架的支持来处理图片、在屏幕上展示视频或是播放声音。本章中我们将展示Apple所提供的这类工具。
图片选择器
Swift…

小米手机系列的演进:从小米1到小米13
1. 小米1(2011年):小米1是小米公司的首款旗舰手机,以超低的售价提供出色的硬件配置和流畅的用户体验。它打破了传统手机市场的价格壁垒,受到广大用户的欢迎。
2. 小米2(2012年):小米…

threejs(4)-纹理材质高级操作
一、纹理重复_缩放_旋转_位移操作 // 导入threejs
import * as THREE from "three";
// 导入轨道控制器
import { OrbitControls } from "three/examples/jsm/controls/OrbitControls.js";
// 导入lil.gui
import { GUI } from "three/examples/jsm/l…
ThreeJS-平行光物体投影(十九)
平行光源(太阳光)
关键代码: //平行光投射相机的属性 // directionalLight.shadow.camera.near 0.5; directionalLight.shadow.camera.far 500; directionalLight.shadow.camera.top 3; di…

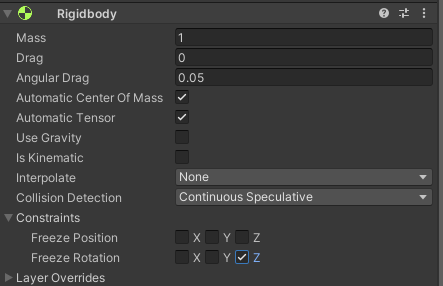
【Unity】【VR】如何让Distance Grab抓取物品时限制物品的Rotation
【背景】
遇到这样的场景,希望抓取Canvas时,Canvas不会沿Z轴旋转。
【问题】
发现Freeze Canvas的Rigid Body没有用。
【分析】
应该是RigidBody的限制仅在物理互动下生效,抓取可能不属于物理互动(比如碰撞),所以不生效。
【思路】
还是得写脚本挂载在Interacta…

Python图片转字符画,太好玩啦(46)
小朋友们好,大朋友们好!
我是猫妹,一名爱上Python编程的小学生。
和猫妹学Python,一起趣味学编程。 今日主题
什么是字符画呢?
如何用Python将图片转为字符画?
我们先找一幅原画,比如它吧&…
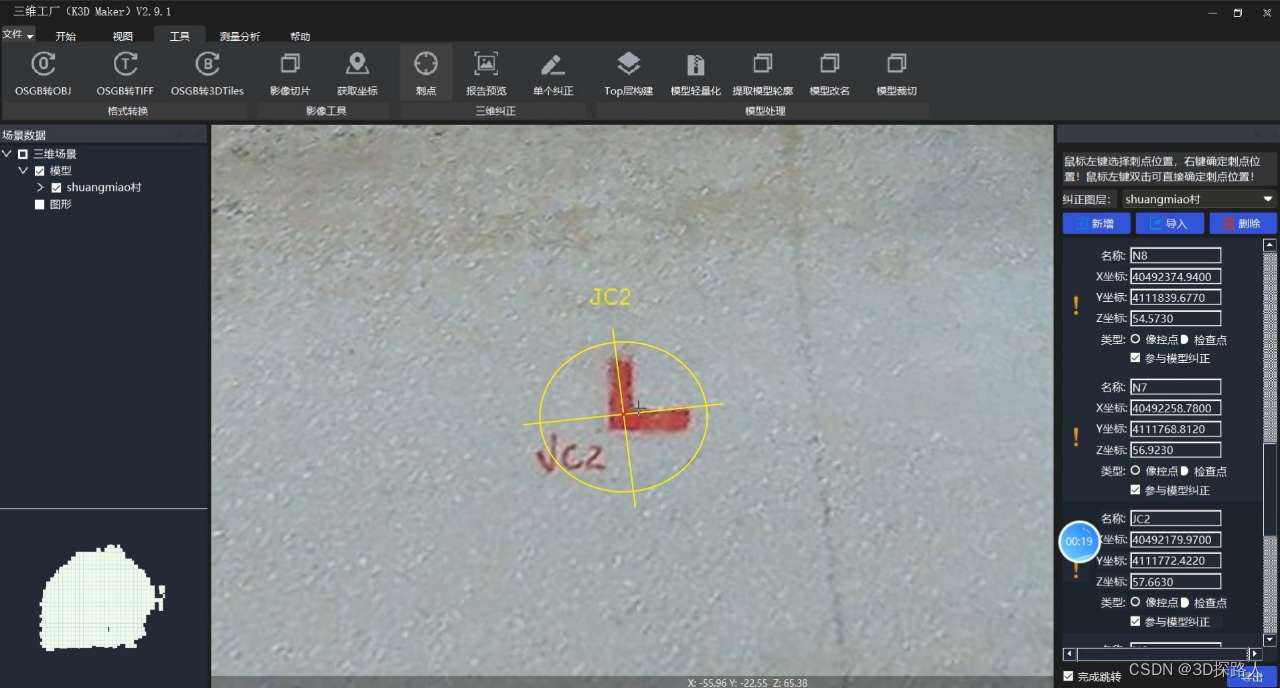
Agisoft Metashape 基于RTK技术的无人机航测免像控技术流程
Agisoft Metashape 基于RTK技术的无人机航测免像控技术流程 文章目录 Agisoft Metashape 基于RTK技术的无人机航测免像控技术流程前言一、软件设置二、添加照片三、坐标转换四、高程改正五、导入检查点六、对齐照片七、检查点刺点八、精度分析前言
利用无人机进行航空摄影测量…
RV1126/RV1109 ISP调试方案
最近一直在做瑞芯微rv1126的开发,由于项目性质,与camera打的交道比较多,包括图像的采集,ISP处理,图像处理,H.264/H.265编解码等各个方面吧。学到了不少,在学习的过程中,也得到了不少…
Baumer工业相机堡盟工业相机如何通过BGAPISDK切换数据BPP8和BPP10和BPP12格式功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK切换数据BPP8和BPP10和BPP12格式功能(C) Baumer工业相机Baumer工业相机BGAPISDK和BPP数据的技术背景Baumer工业相机通过BGAPISDK使用BPP数据切换功能1.引用合适的类文件2.通过BGAPISDK使用BPP数据切换功能 Ba…
Baumer工业相机堡盟工业相机如何通过BGAPISDK将图像放大缩小显示(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将图像放大缩小显示(C#) Baumer工业相机Baumer工业相机BGAPISDK和图像放大缩小的技术背景Baumer工业相机通过BGAPISDK将相机图像图像放大缩小功能1.引用合适的类文件2.通过BGAPISDK将相机图像图像放大缩小功能…
unity制作手游fps僵尸游戏
文章目录 介绍制作基本UI枚举控制角色移动切枪、设置音效、设置子弹威力、设置子弹时间间隔、换弹准星控制射击僵尸动画、血条设置导航 介绍 利用协程、枚举、动画器、导航等知识点。 实现移动、切枪、换弹、射击、僵尸追踪、攻击。 制作基本UI
制作人类血条、僵尸血条、移动按…
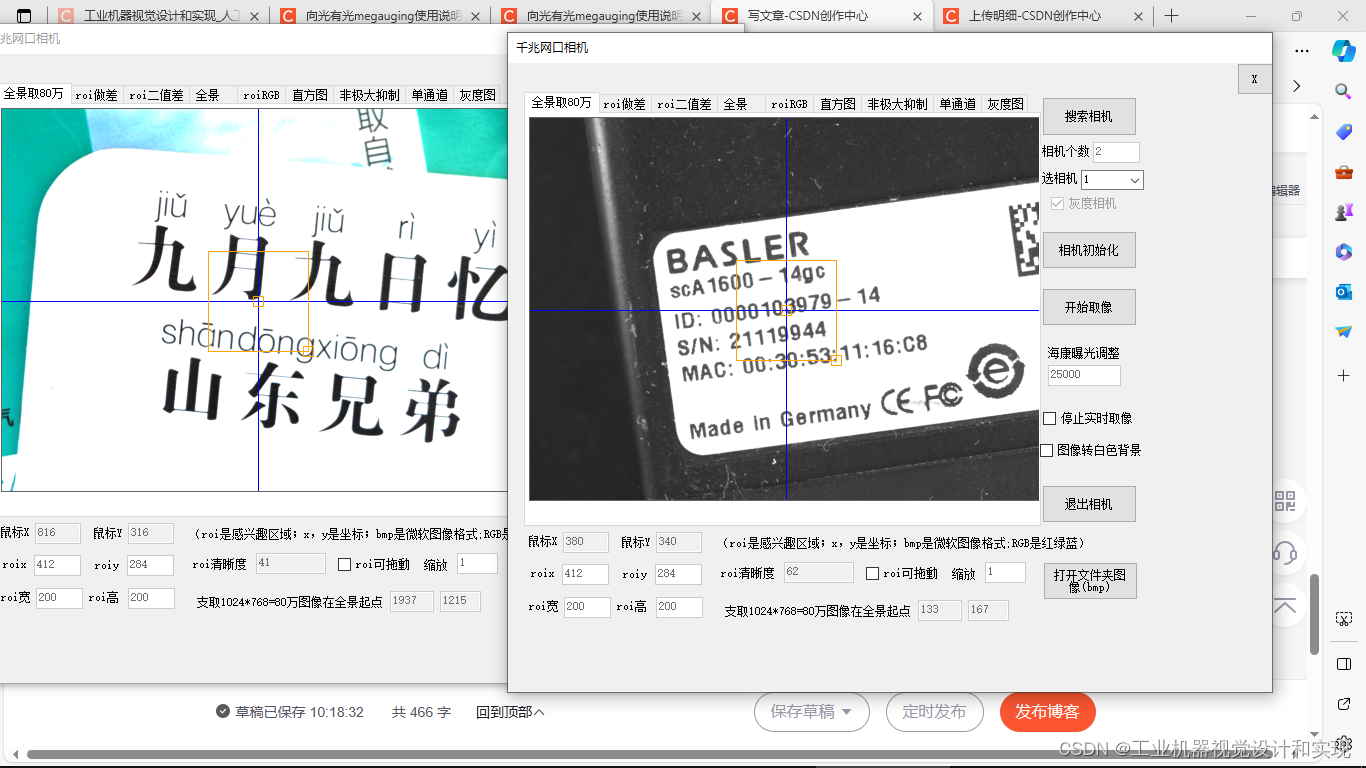
工业机器视觉megauging(向光有光)使用说明书(三,轻量级的visionpro)
下来我们说说第二个相机的添加:
第一步,点击相机二,如下: 第二步,点击:加载工具组.xml,加载toolgroupxml2目录下的:工具组.xml
注意,一个相机只能用一个toolgroupxml,第…

数字增益和模拟增益理解和示例
本文对数字增益和模型增益的理解做简单介绍,并使用海康工业相机的MVS提供调参平台进行参数调整和效果展示,最后使用C模型相应的增益,更加直观的展示效果。 目录 模拟增益数字增益海康MVS示例模拟增益为0时:模拟增益为20时&#x…

【专题连载】基于5G+机器视觉的芯片检测解决方案
基于5G机器视觉的芯片检测解决方案 背景
机器视觉的价值体现在它能为工业生产带来产量的增加和产品质量的提升,并同时降低生产成本,推动了工业生产的快速发展,使工业生产企业真正从中受益。为了进一步压缩生产成本,工业控制的产…
第三方应用调用前摄失败,导致原生相机的后摄挂掉
第一次分析出现问题:以为是调用前摄,检测不到后摄所致,导致误导了许久
仔细查找才发现:相机前摄的参数错误,当前app获取不到这么大的参数
Camera2-Parameters: set: Requested preview size 1080 x 1440 is not suppor…

宣传技能培训1——《新闻摄影技巧》光影魔法:理解不同光线、角度、构图的摄影效果,以及相机实战操作 + 新闻摄影实例讲解
新闻摄影技巧 写在最前面摘要 构图与拍摄角度景别人物表情与叙事远景与特写 构图与拍摄角度案例 主体、陪体、前景、背景强调主体利用前景和背景层次感的创造 探索新闻摄影中的构图技巧基本构图技巧构图技巧的应用实例实例分析1. 黄金分割和九宫格2. 三角型构图3. 引导线构图4.…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C) Baumer工业相机Baumer工业相机的Bufferlist序列功能的技术背景CameraExplorer如何查看相机Bufferlist功能在BGAPI SDK里通过函数设置相机Bufferlist参数 Baumer工业相机通过BGAP…
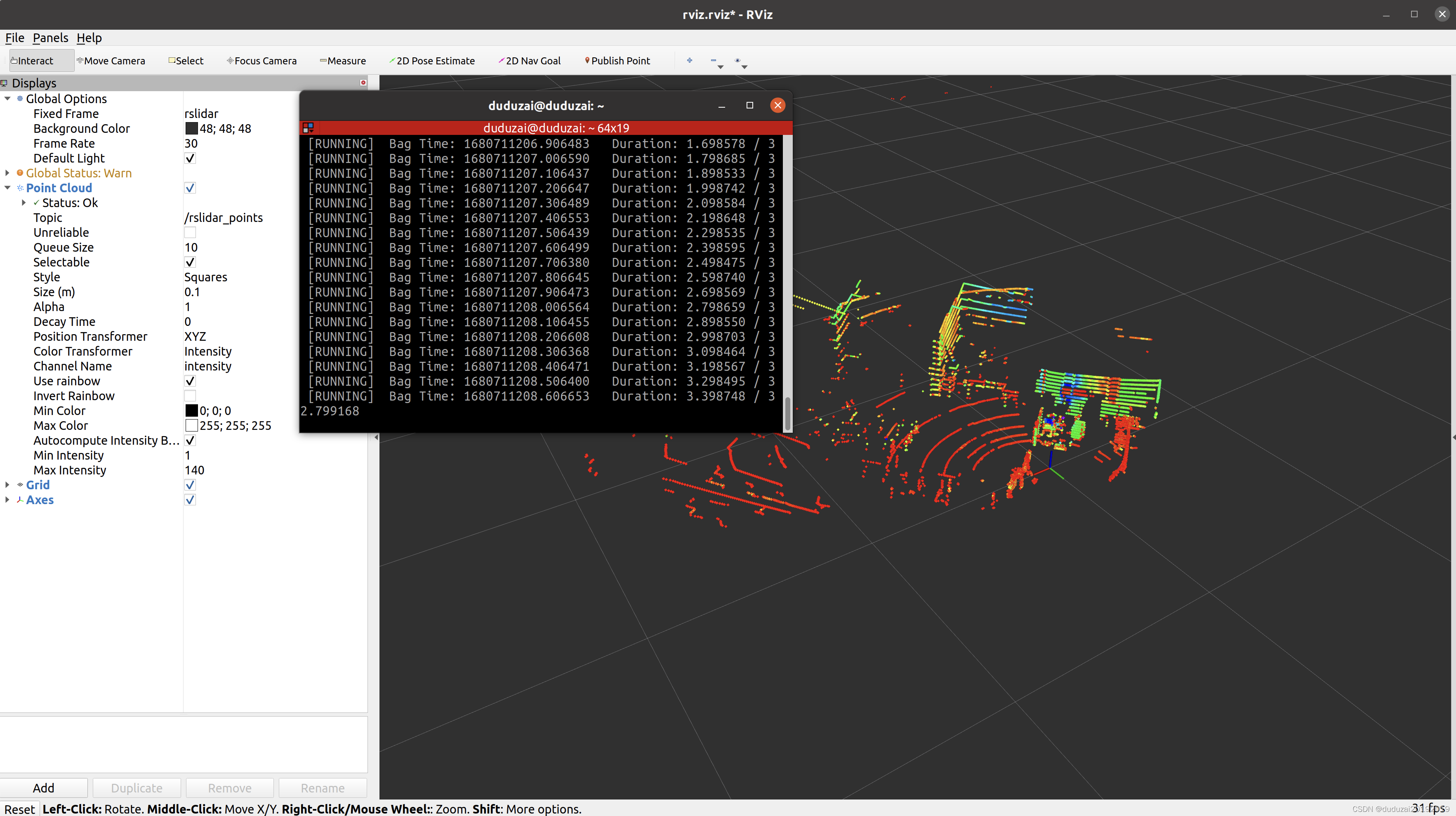
Robosense激光雷达录制rosbag
文章目录运行环境:1.1 rs16连接:1.2 rs16配置1.3 rslidar config修改1.4 录制rslidar_packets话题1.5 录制rslidar_points话题1.6 Rviz可视化rslidar_points.bag运行环境:
ubuntu20.04 noetic 速腾Robosense 16线 宏基暗影骑士笔记本
1.1 r…

机器视觉海康工业相机SDK参数设置获取
视觉人机器视觉培训-缺陷检测项目-食品行业草鸡蛋外观检测 相机参数类型可分为六类,除 command 参数外,每一类都有其对应的设置与获取函数接口。
表 1 参数类型及对应函数接口介绍 *详细函数接口可参考 SDK 手册:
C:\Program Files (x86)\MVS\Development\Documentation…

海康Visionmaster-全局脚本:通信设备 ID 获取方法
全局脚本中通信数据接收函数中的 DeviceID 是按照设备管理列表中至上而下、从 0 开始依此增 1,现在这种方法行不通. 每次增加设备列表都会分配唯一的 ID 号,后续全局脚本中判断设备 ID 通过这个唯一 ID 识别,不再从上到下默认排序。

【iOS-UIImagePickerController访问相机和相册】
【iOS-UIImagePickerController访问相机和相册】 一. UIImagePickerController的介绍1 . UIImagePickerController的作用2 . UIImagePickerController的功能 二 . UIImagePickerController的测试程序 一. UIImagePickerController的介绍
1 . UIImagePickerController的作用
U…
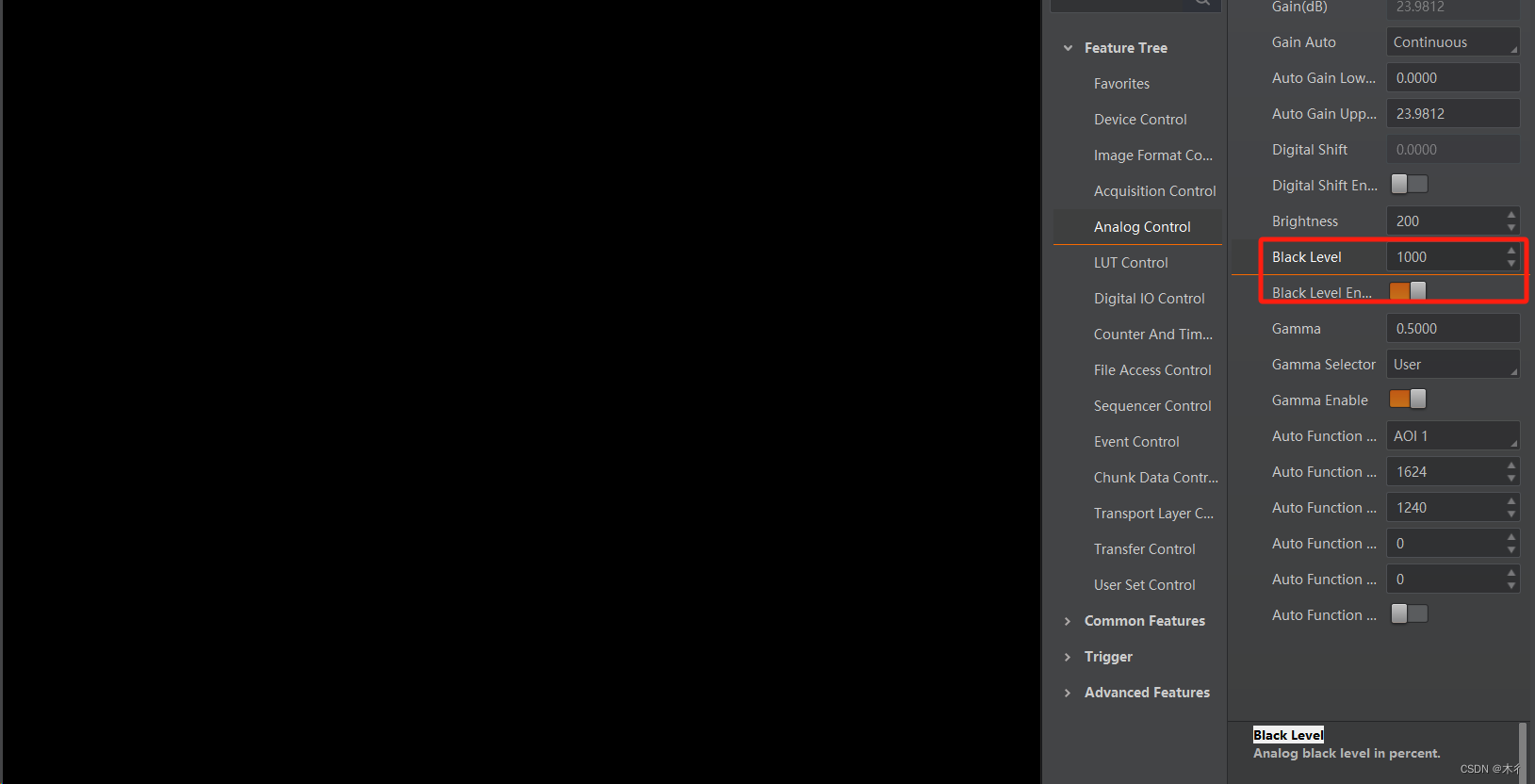
相机设置参数:黑电平(Black Level)详解和示例
本文通过原理和示例对相机设置参数“黑电平”进行讲解,以帮助大家理解和使用。
原理
相机中黑电平原理是将电平增大,可以显示更多暗区细节,可能会损失一些亮区,但图像更多的关注暗区,获取完图像信息再减掉。只是为了…

机器视觉工程师注意高新待遇来了,非标设备厂家早就布局海外市场,国内大多数企业是谋生存情况下,而更具有大局观的企业走出去则是谋发展
冬天来了,大家记得多添点衣服,记得穿秋裤!
当各个厂家都在国内抢订单的时候,更多的非标设备厂家早已走向海外,布局海外市场,或者在新的领域积极开展新的业务。为自身公司带来大量海外订单。
别的企业都是…
宣传技能培训1——《新闻摄影技巧》
新闻摄影技巧 写在最前面摘要 构图与拍摄角度景别人物表情与叙事远景与特写 构图与拍摄角度案例 主体、陪体、前景、背景强调主体利用前景和背景层次感的创造 探索新闻摄影中的构图技巧基本构图技巧构图技巧的应用实例实例分析1. 黄金分割和九宫格2. 三角型构图3. 引导线构图4.…
3D 线激光相机的激光条纹中心提取方法
论文地址:Excellent-Paper-For-Daily-Reading/application/centerline at main
类别:应用——中心线
时间:2023/11/06
摘要
线激光条纹中心提取是实现线激光相机三维扫描的关键,根据激光三角测量法研制了线激光相机,基于传统 Steger 法对其进行优化并提出一种适用于提…
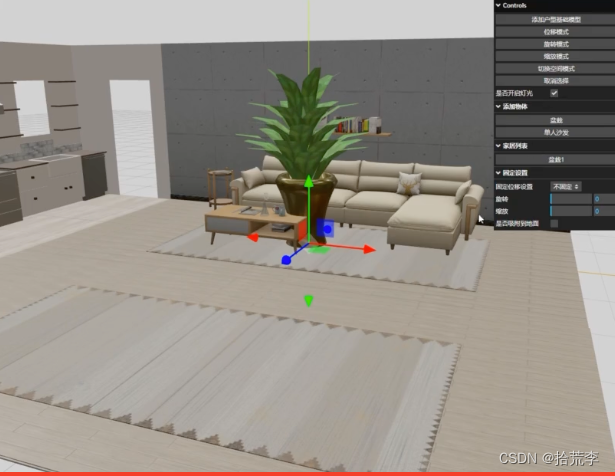
threejs(6)-操控物体实现家居编辑器
// 导入threejs
import * as THREE from "three";
// 导入轨道控制器
import { OrbitControls } from "three/examples/jsm/controls/OrbitControls.js";
// 导入lil.gui
import { GUI } from "three/examples/jsm/libs/lil-gui.module.min.js";…
2m照片用手机怎么照?三个方法随心选!
在用手机拍照的时候,我们会发现拍出的照片尺寸都很大,占用手机的存储空间较多,而自己又不需要如此高清晰度的照片,那么如何解决这个问题呢?下面介绍了三种方法。 方法一:调整手机拍照的设置选项
1、打开手…
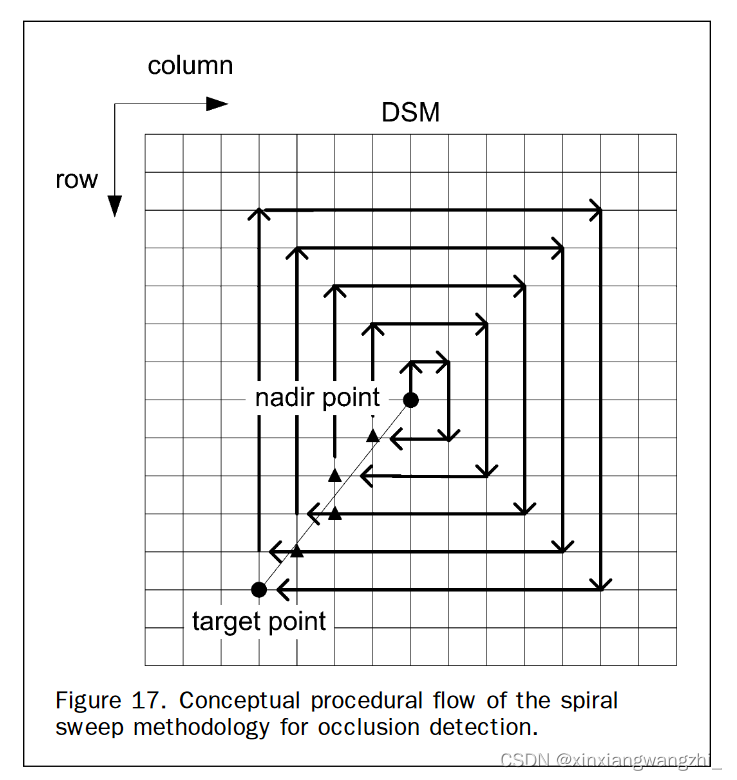
遮挡检测--基于角度的遮挡检测方法
文章目录1基于角度的遮挡检测方法2遮挡检测遍历方法2.1方法1--自适应径向扫描方法2.2方法2--螺旋扫描法参考1基于角度的遮挡检测方法
在基于角度的方法中,通过依次分析DSM中沿径向方向的投影光线的角度来识别遮挡。定义α\alphaα角:DSM三维点与相机中心…
Ros Noetic 20.04 ORB-SLAM2-RGBD 稠密度建立地图实战
前言 由于ORB-SLAM2在构建的时候只在地图中保留了特征点,对于使用RGB-D相机的小伙伴而言,更希望得到一个点云地图。好在ORB-SLAM2这个框架结构清晰,只需要单独添加一个线程用于维护点云地图,将ORB-SLAM2生成的关键帧传入点云地图构建线程,利用传入关键帧来生成点云地图,这…
Baumer工业相机堡盟工业相如何使用BGAPISDK通过两种不同的方法进行图像回调函数的使用(C#)
Baumer工业相机堡盟工业相如何使用BGAPISDK通过两种不同的方法进行图像回调函数的使用(C#) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景方法一:使用BGAPI SDK里的函数在图像回调函数里完成图像数据转换方法二:使用Bitm…

CCBN 2023看点分析:国产8K摄像机国产化替代趋势增强
4月21日,为期3天的CCBN 2023(第29届中国国际广播电视信息网络展览会)在北京首钢会展中心圆满落幕,CCBN展会是亚洲广播电视设备展览会,也是中国广电行业规模最大、影响力最强的国际性展会之一,更是广电行业内…

MC-4/11/01/400 ELAU 软件允许用户完全访问相机设置
MC-4/11/01/400 ELAU 软件允许用户完全访问相机设置
一个完整的Sentinel模具保护解决方案包括一到四台冲击式摄像机、专用红外LED照明和镜头、Sentinel软件以及所有与模压机连接的必要互连组件。摄像机支架基于磁性,可快速、安全、灵活地部署。此外,一个…
opencv读取摄像头并读取时间戳
下面这行代码是获取摄像头每帧的时间戳: double timestamp cap.get(cv::CAP_PROP_POS_MSEC); 改变帧率的方法是:
cap.set(cv::CAP_PROP_FPS, 30); //帧率改为30
但是实际测试时发现帧率并未被改变,这个可能和VideoCapture cap(cv::CAP_V…

要在VMware(虚拟机)上获取相机连接状态并显示在主界面上,您可以使用以下步骤:
在VM上安装相机驱动程序:确保VM中已安装对应的相机驱动程序,以便能够连接和使用相机。 检查相机连接状态:在VM中,打开设备管理器(Device Manager)并检查相机是否显示为已连接状态。如果显示为已连接&#…
Android通过OpenCV实现相机标定
在 Android 中使用 OpenCV 实现相机标定,你可以按照以下步骤进行操作: 首先,确保你已经在项目中引入了 OpenCV 库的依赖。 创建一个 CameraCalibrator 类,用于执行相机标定。 import org.opencv.calib3d.Calib3dimport org.open…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取每张图像的微秒时间和FrameID(C#)
BGAPI SDK获取图像微秒级时间和FrameID
Baumer工业相机Baumer工业相机FrameID技术背景一、FrameID是什么?二、使用BGAPI SDK获取图像微秒时间和FrameID步骤 1.获取SDK图像微秒级时间2.获取SDK图像FrameIDBaumer工业相机使用微秒级时间和FrameID保存的用处Baumer工业…
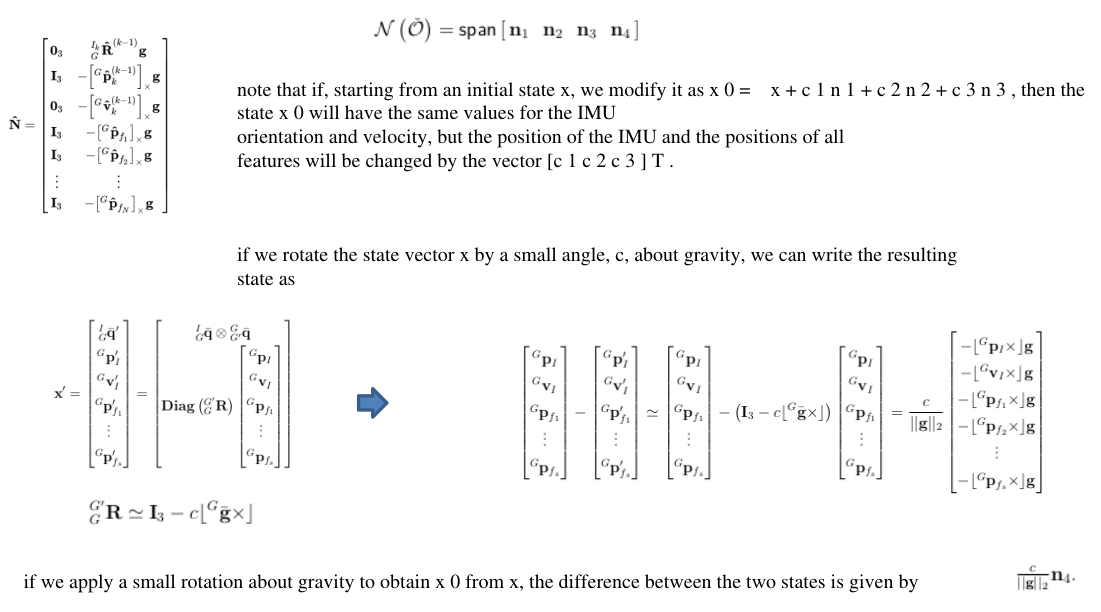
VINS中的观测性问题
文章目录 一、背景二、BA problem的观测性问题1、不可观方向2、解决方案3、优化问题中信息矩阵物理意义 三、Keyframe-based Visual-Inertial SLAM的观测性问题1、不可观问题2、解决方案 四、MSCKF观测性分析1、观测性分析2、解决方案3、小结 一、背景
本文档分析以下VINS中的…
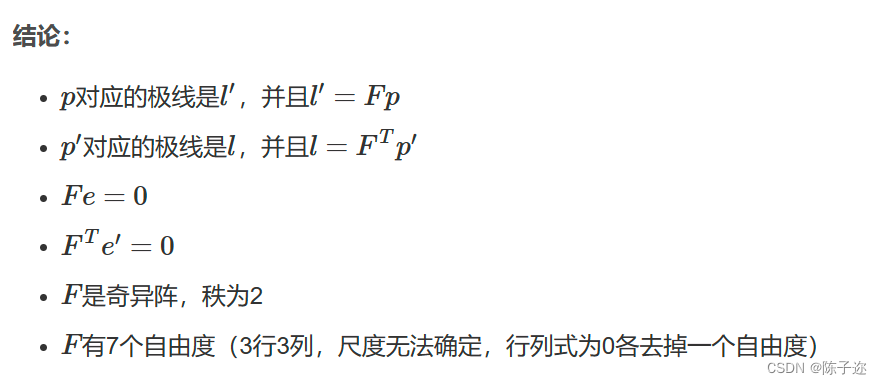
双目视觉实战---三维重建基础与极几何
目录
一,简介
二. 双视图与三角化
1. 三角化模型
2. 多视图几何的关键问题
3、极几何 三、本质矩阵
四、基础矩阵
3. 基础矩阵的作用及小结
五、基础矩阵估计 一,简介
三维重建是指通过一系列的图像或传感器数据,推导出物体或场景的…
双目标定之张正友标定法数学原理详解matlab版
目录
前言
1.相机标定
1.1 双目视觉基本原理
1. 2 相机的四个坐标系
1.3 相机畸变与校正 2.1 相机标定
张正友友棋盘格标定法在matlab的实现 这一篇主要详细介绍标定原理和相机各个坐标系之间的关系为后续的定位测距和重建做基础 前言
最近重新整理了一下自己做过的双目…

镜头边缘的解析力通常比中心差很多的原因是什么?
1、问题背景
之前有总结过一篇文章,“ 相机出图画面一半清晰,一半模糊的原因是什么?”里面有描述到关于镜头边缘的清晰度通常比中心要差的原因主要是光的折射导致的,有读者指出问题,折射率是和传输介质相关࿰…
ROS 教程之 vision : 用笔记本摄像头获取图像
如何用笔记本自带的摄像头采集图像
尝试一:安装Webcam 驱动
参考
大神白巧克力亦唯心博客: 链接: ROS 教程之 vision : 用各种摄像头获取图像.
sudo apt-get install git-core
cd ~/catkin_ws/src #catkin_ws/src对应你自己建立的catkin工作空间…
双目测距--3 双目标定
目录
-1 流程说明:
0 几个重要 函数
1、calibrateCamera()函数
2、stereoCalibrate()
3、findChessboardCorners() 棋盘格角点检测
4、stereoRectify()
5、initUndistortRectifyMap()
6、remap()
1、用于标定的图像 2、标定前
3、OpenCV进行双目标定
单…
OpenCV 相机相关函数
一、变换参数矩阵的求解
1. 计算三个二维点对之间的仿射变换矩阵:getAffineTransform()
2. 计算多个二维点对之间的最优放射变换矩阵(误差最小准则):estimateRigidTransform();或者findHomography();
3. 计算四个二维点对之间的…
Baumer工业相机堡盟相机如何通过BGAPI SDK联合OpenCVSharp进行图像简单拼接和显示(C#)
Baumer工业相机堡盟相机如何通过BGAPI SDK联合OpenCV进行图像简单拼接和显示(C#) Baumer工业相机Baumer工业相机SDK联合OpenCVSharp的技术背景代码分析第一步:先引用对应的OpenCV的类文件第二步:在回调函数里进行Buffer图像转换并…

代码:对鱼眼相机图像进行去畸变处理
图像投影模型:针孔[fx, fy, cx, cy] 图像畸变模型:切向径向畸变[k1, k2, p1, p2] 说明:用于备忘
第一部分是常规的去畸变操作,在已知内参的情况下对鱼眼相机进行去畸变,这里使用的是remap映射在对图像去畸变后&#x…
超宽带(UWB)辅助快速定位与测绘系统-附论文及源码
目录
简介
系统架构
2 , A.UWB定位
B. 视觉惯性⾥程计
论文文献
代码下载链接 本⽂提出了⼀种利⽤惯性传感器和深度相机的超宽带&
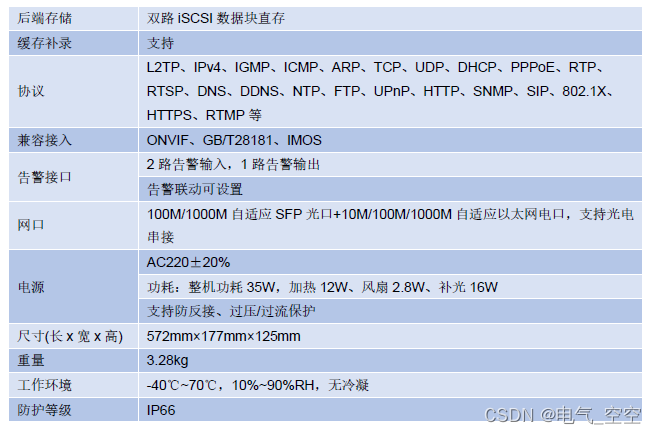
网联V2X视频事件检测相机使用说明书
1 产品概览 网联 V2X视频事件检测相机 视频事件检测相机 ,内置 1/1.8″逐行扫描 800万像素传感器;视 万像素传感器;视 频编码协议支持 H.265、H.264、MJPEG;具有 1个 10M/100M/1000M自适应以 太网 RJ45接口、 1路 RS485接口&#…

【计算机视觉】3D视觉
文章目录 一、基本问题二、三个坐标系 X w \boldsymbol{X}_w Xw到 X c \boldsymbol{X}_c Xc的转换 X c \boldsymbol{X}_c Xc到 x i \boldsymbol{x}_i xi的转换投影矩阵尺度模糊问题 三、相机标定四、立体视觉 我的《计算机视觉》系列参考UC Berkeley的CS180课程&#x…

九.镜头知识之CRA(ChiefRay Angle) 主光线角度
九.镜头知识之CRA(ChiefRay Angle) 主光线角度 文章目录 九.镜头知识之**CRA(ChiefRay Angle) 主光线角度**1.9.1 Sensor接收光能1.9.1.1 CRA 定义1.9.1.2 Lens CRA1.9.1.3 Sensor CRA1.9.2 Lens和Sensor搭配的三个重要参数1.9.2.1 ov7251 cra定义:主光线角度为主光线与平行光…
Android 13 骁龙相机点击录像流程分析
一.背景
由于最近客户定制需要将文件挂载类型修改为sdcardfs,由于修改了文件挂载类型,导致了骁龙相机录像后不显示左下角缩略图,也不能点击进入相册中,相册里面也没有录制的视频,故对骁龙相机从点击事件开始进行问题的排查 二.流程介绍
录像的流程大概分为几个阶段:进行…
视觉SLAM十四讲 ch3 (三维空间刚体运动)笔记
本讲目标
●理解三维空间的刚体运动描述方式:旋转矩阵、变换矩阵、四元数和欧拉角。 ●学握Eigen库的矩阵、几何模块使用方法。
旋转矩阵、变换矩阵 向量外积
向量外积(又称叉积或向量积)是一种重要的向量运算,它表示两个向量所形成的平行…

机器视觉系统选型-参数-镜头各个参数之间相互关系
焦距越小,景深越大;焦距越小,畸变越大; 光圈越大,图像亮度越高;光圈越大,景深越小; 光圈越大,分辨率越高; 一般像场中心较边缘分辨率高,像场中心较…
Three.js实现3D模型适配相机满屏
本文介绍在 three.js 中将对象适配相机视野的解决方案。 换句话说,将相机在 z 轴上拉回多远,才能在不裁剪的情况下尽可能大地显示对象。 推荐:用 NSDT场景设计器 快速搭建3D场景。 1、问题陈述
最初我一直在使用 viewstl 在这个博客上显示 3…

单反相机参数之ISO/焦距篇
ISO/焦距是什么 要说什么是ISO还要从传统胶片相机说起,ISO称作为感光度,它是衡量传统相机所使用胶片感光速度的国际统一指标,其反映了胶片感光时的速度(其实是银元素与光线的光化学反应速率)。而对于现在并不使用胶片的…

单反相机参数之光圈、快门篇
本文导航 开篇:光圈和快门是什么 光圈特性(一):控制进光量 光圈特性(二):控制景深 快门特性(一):控制进光量 快门特性(二)&#x…

淘宝拍立淘多码识别方案总结
本文通过拆解原始问题、发散思路优化等方式,记录了扫一扫从单码到多码识别的技术框架改造及多码识别率优化方案。其中涉及解码SDK的能力、码处理技术链路、码转换算法、降低漏检率策略等设计与实现。 背景与挑战 多码即在同一个界面中同时存在多个条码或二维码&…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用相机日志跟踪功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用相机日志跟踪功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和短曝光功能的技术背景Baumer工业相机通过NEOAPI SDK使用相机日志跟踪功能1.引用合适的类文件2.通过NEOAPI SDK使用相机日志跟踪功能3.通…

Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为Mat图像格式(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里实现相机图像转换为Mat图像格式联合OpenCV实现相机图像转换为Mat图像格式测试演示图 工业相机…
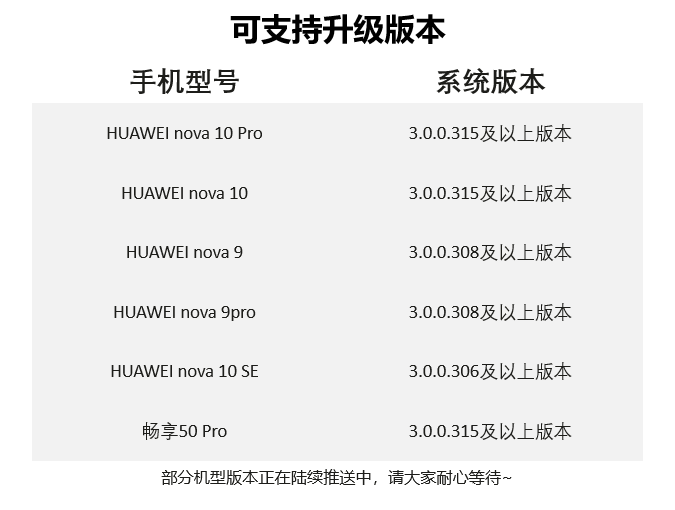
nova相机功能又㕛叒叕升级了!!!拍人像更自然
nova系列手机一直以其高颜值外观和性能体验,持续热销,成为当下年轻人追捧的手机之一。其出色的影像能力,无论是日常生活中的风景拍摄还是人物拍摄,都能够拍摄出非常清晰细腻的照片,同时还配备了多种摄影模式࿰…
three.js 点按钮,相机飞行靠近观察设备
效果: 代码:
<template><div><el-container><el-main><div class"box-card-left"><div id"threejs" style"border: 1px solid red"></div><div class"box-right&quo…
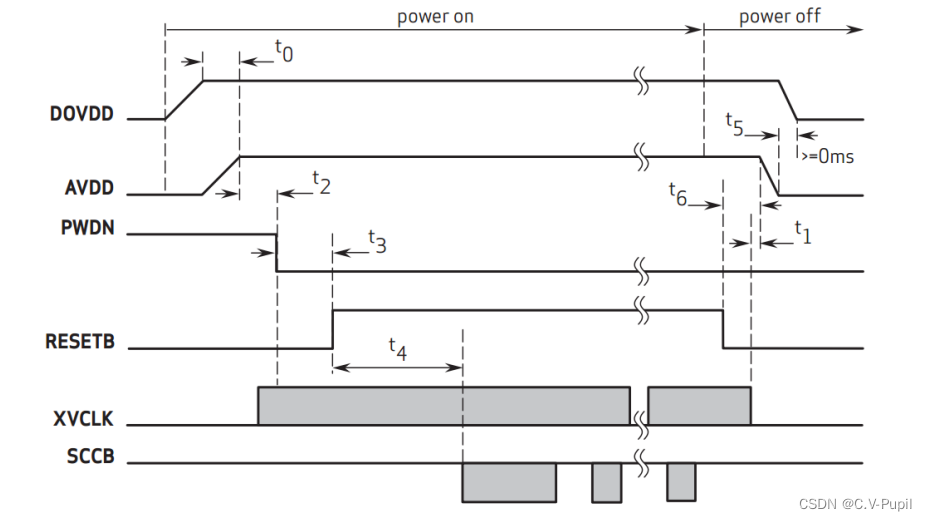
基于 OV5640 摄像头理论知识讲解-数字接口和控制接口
基于OV2640/ OV5640 的图像采集显示系统系列文章目录: (1)基于 OV5640 摄像头理论知识讲解-成像和采样原理 (2)基于 OV5640 摄像头理论知识讲解-数字接口和控制接口 (3)基于 OV5640 摄像头理论知…
小米12s ultra,索尼xperia1 iv,数码相机 拍照对比
首先说明所有的测试结果和拍摄数据我放到百度网盘了(地址在结尾)
为什么做这个测试
我一直想知道现在的手机和相机差距有多大,到底差在哪儿?
先说结论:
1.1英寸的手机cmos(2022年) 6年前(2016)的入门款相机(m43画幅)
2.手机 不能换镜头,只能在特定的拍摄距离才能发挥出全…
Baumer工业相机堡盟工业相机如何使用OpenCV实现相机图像的显示(C#)
Baumer工业相机堡盟工业相机如何使用OpenCV实现相机图像的显示(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里使用OpenCV实现相机图像的显示联合OpenCV实现相机图像的显示测试演示图 工业相机通过使用OpenCV实现…

《计算机视觉中的多视图几何》笔记(6)
前面的1-5章在序号上被标为Part 0,标题是The Background: Projective Geometry, Transformations and Estimation,讲述了一些背景知识,包括投影几何、变换和估计。接下来的部分进入到Part 1,标题是Camera Geometry and Single Vie…

LabVIEW图像识别检测机械零件故障
项目背景:
在工业生产中,零件尺寸的准确检测对保证产品质量至关重要。传统的人工测量方法不仅耗时费力,精度低,还容易导致零件的接触磨损。为了解决这些问题,开发了一套基于LabVIEW和机器视觉的机械零件检测系统。该系…

最全行车记录仪方案+主控芯片介绍!
最近在关注行车记录仪,了解了之后 写此文章想让车友们知道什么是行车记录仪的高端标准,什么是好货,因为大部分人都不知道。 看到很多朋友在问,什么是行车记录仪的方案,行车记录仪的主控究竟有什么区别,我该…
三个问题:IPC和ITC主要的差异点和相同点 、影响图像成像效果的因素有哪些、摩尔纹如何产生的和消除方法
问题一、IPC和ITC主要的差异点和相同点 差异点
1、应用场景:IPC主要应用于普通安防监控领域,如广场、商场、公园、写字楼等。它们通常被用于监控室内或有限区域的安全,例如,监控办公室、仓库、门口等。而ITC则主要应用于交通领…
如何降低海康、大华等网络摄像头调用的高延迟问题(二)
目录
1.RTSP介绍
2.解决办法1
3.解决办法2 1.RTSP介绍
RTSP(Real-time Streaming Protocol)是一种用于实时流媒体传输的网络协议。它被设计用于在服务器和客户端之间传输音频、视频以及其他流媒体数据。
RTSP协议允许客户端通过与服务器建立RTSP会话…
8. 基于消影点进行相机内参(主点)的标定
目录 1. ocam模型2. 消影点3. 基于消影点进行相机主点标定3.1 基于ocam模型的主点标定 感谢大家的阅读。 1. ocam模型
可以参考我的另一篇博客ocam模型。 这里简单提一下ocam模型: 这个模型将中心折反射相机和鱼眼相机统一在一个通用模型下,也称为泰勒模…
打开和关闭conda,激活和关闭conda,详解退出conda环境
Python编程技巧:详解退出conda环境 https://www.python100.com/html/110499.html # 创建虚拟环境~/anaconda3/bin/conda create -n name python3.6 # 激活虚拟环境 source ~/anaconda3/bin/activate name # 查看所有环境 conda env list # 激活虚拟环境 conda activ…

【AIGC-图片生成视频系列-3】AI视频随心而动:MotionCtrl的相机运动控制和物体运动控制
最近,「单张图片生成视频」相关工作很多,但运动控制的准确性依旧是个挑战,包括相机运动的控制以及物体运动控制。
然,MotionCtrl 横空出世。
一. 项目简介
MotionCtrl——一个相机运动控制、物体运动控制的视频工具,…
SLAM中相机姿态估计算法推导基础数学总结
相机模型
基本模型 内参 外参
对极几何
对极约束 外积符号 基础矩阵F和本质矩阵E 相机姿态估计问题分为如下两步: 本质矩阵 E t ∧ R Et^{\wedge}R Et∧R因为 t ∧ t^{\wedge} t∧其实就是个3x3的反对称矩阵,所以 E E E也是一个3x3的矩阵
用八点法估计E…
Exposure2023专业摄影RAW格式大师专业滤镜特效
Exposure2023是一款专为摄影艺术设计的图像编辑器。新的 Exposure2023结合了专业级的照片调整、庞大的华丽照片库和令人愉悦的高效设计。可以提供最大,最准确的电影外观选择。Exposure的创意外观不仅限于电影模拟,从干净优雅的现代风格到引人注目的色彩变…
高速相机传输带宽分析与随笔
高速相机传输带宽分析与随笔
目前,高速相机的传输瓶颈,受限于传输的带宽。
从CMOS读取数据,到FPGA进行处理,通过高速收发器GT系列,进行大数据量的传输,最后通过传输接口将数据转移到计算机。
这里面传输…

用于视觉检测的线扫远心镜头VS-LTC系列
VS-LTC 系列线扫远心镜头,近期已经新增 3.5倍及5倍型号 ,支持大靶面芯片相机;适用于半导体,基板以及 Mini LED等行业的视觉检测。
在机器视觉产品资料查询平台,了解更多VS-LTC工业镜头的信息。
大靶面线扫远心镜头
…
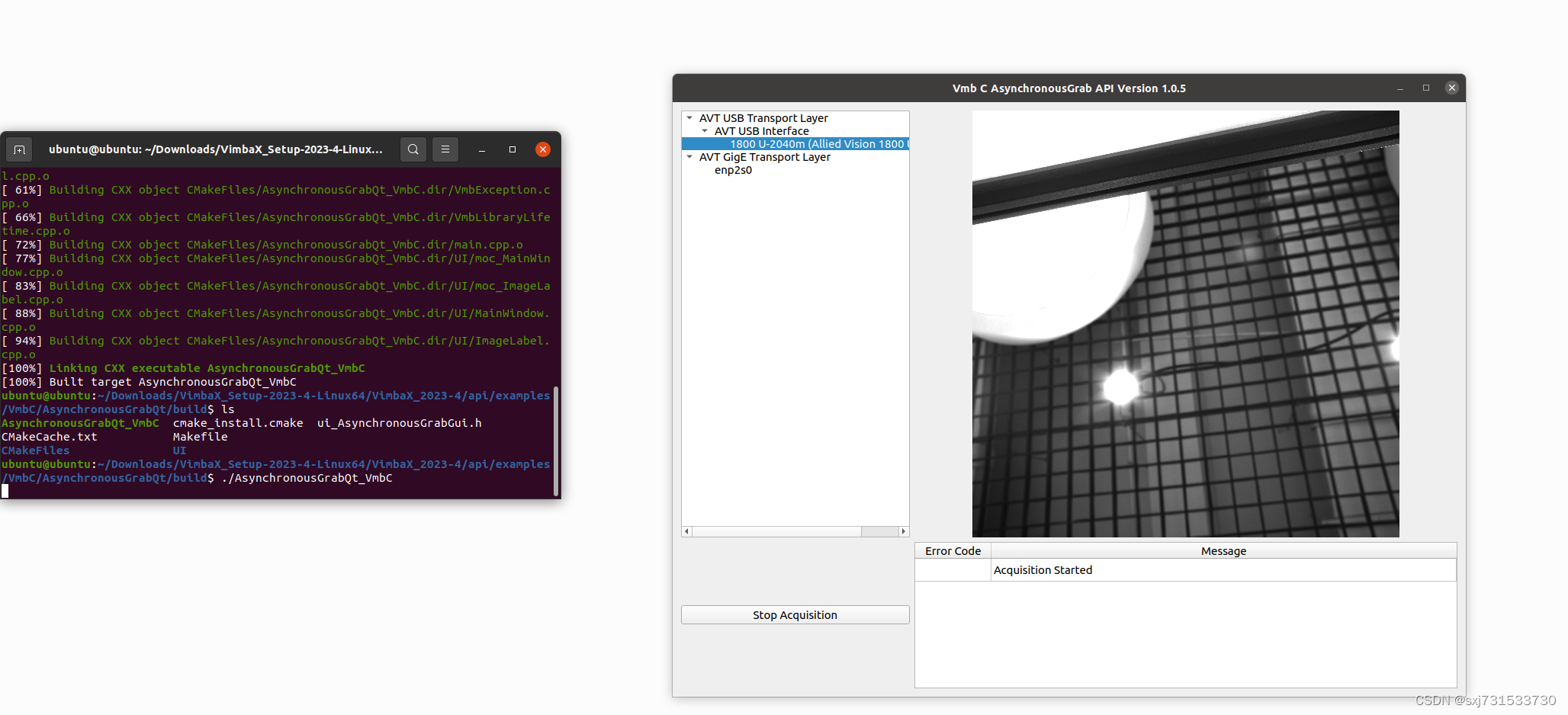
64、ubuntu使用c++/python调用alliedvisio工业相机
基本思想:需要使用linux系统调用alliedvisio工业相机完成业务,这里只做驱动相机调用,具体不涉及业务开发
Alvium 相机选型 - Allied Vision 一、先用软件调用一下用于机器视觉和嵌入式视觉的Vimba X 软件开发包 - Allied Vision
VimbaX_Set…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK使用UserSet功能保存和载入相机的各类参数(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK使用UserSet功能保存和载入相机的各类参数(C)Baumer工业相机Baumer工业相机BGAPISDK中UserSet的技术背景代码案例分享第一步:保存相机当前参数设置UserSet_Save第二步:载入已经保存的…
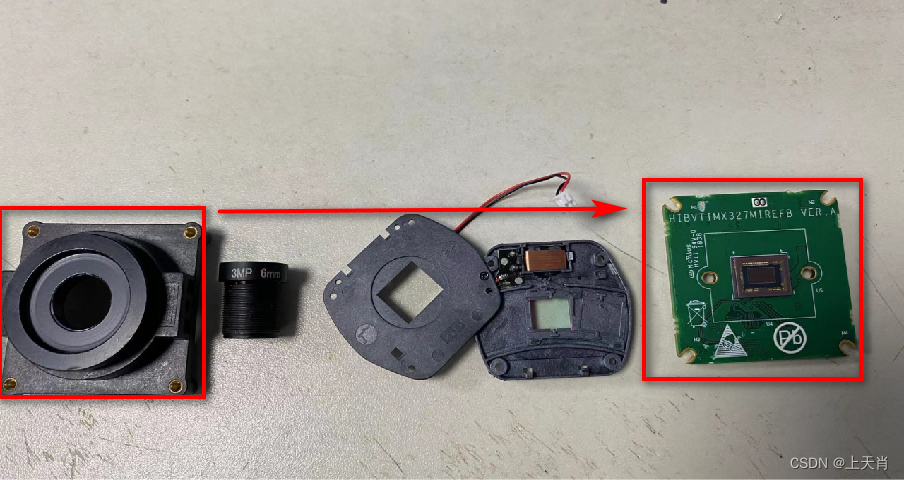
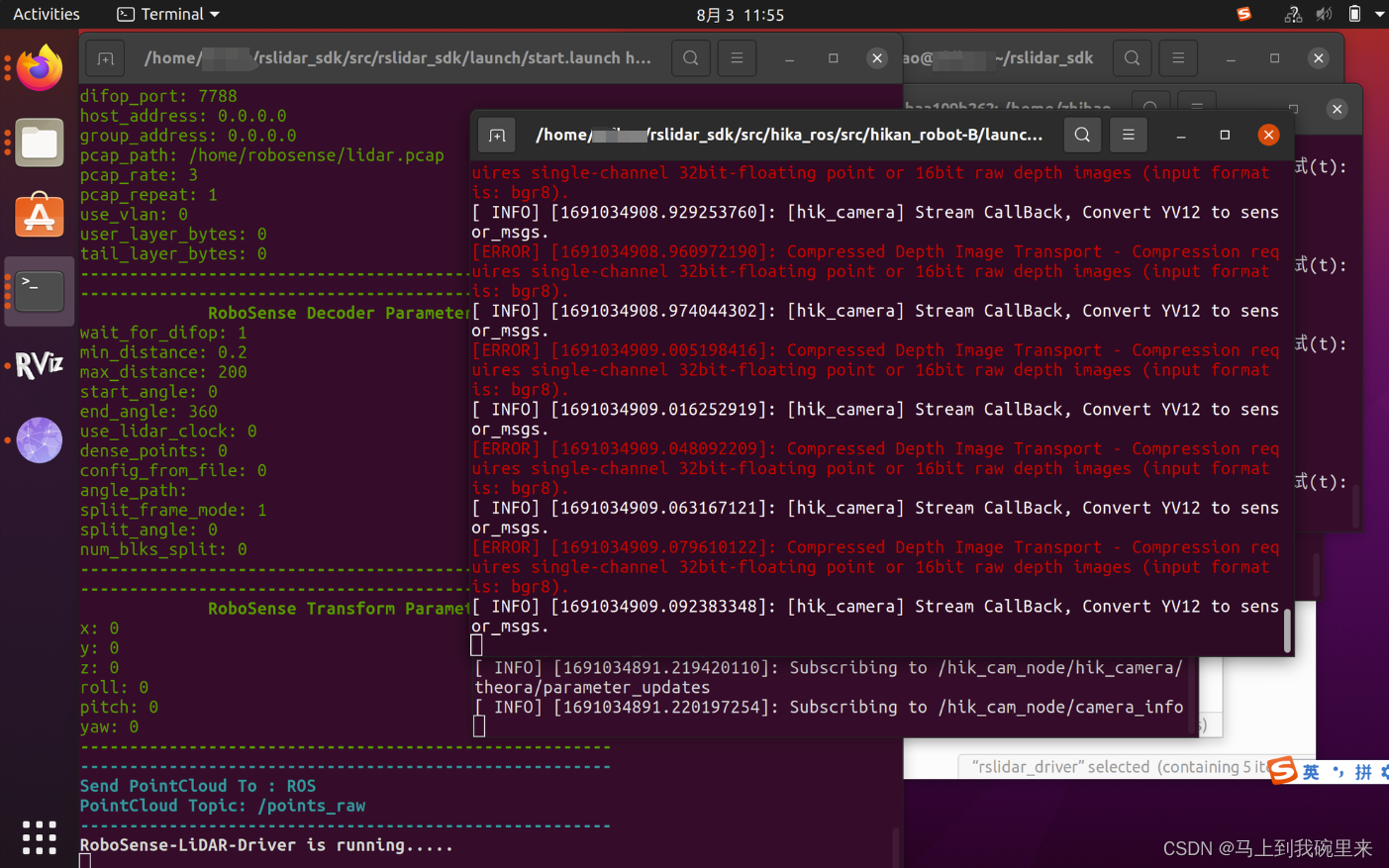
【Ubuntu18.04】激光雷达与相机联合标定(Livox+HIKROBOT)(一)
LivoxHIKROBOT联合标定 引言1 海康机器人HIKROBOT SDK二次开发并封装ROS1.1 介绍1.2 安装MVS SDK1.3 封装ROS packge 2 览沃Livox SDK二次开发并封装ROS3 相机雷达联合标定3.1 环境配置3.1.1 安装依赖——PCL 安装3.1.2 安装依赖——Eigen 安装3.1.3 安装依赖——Ceres-solver …
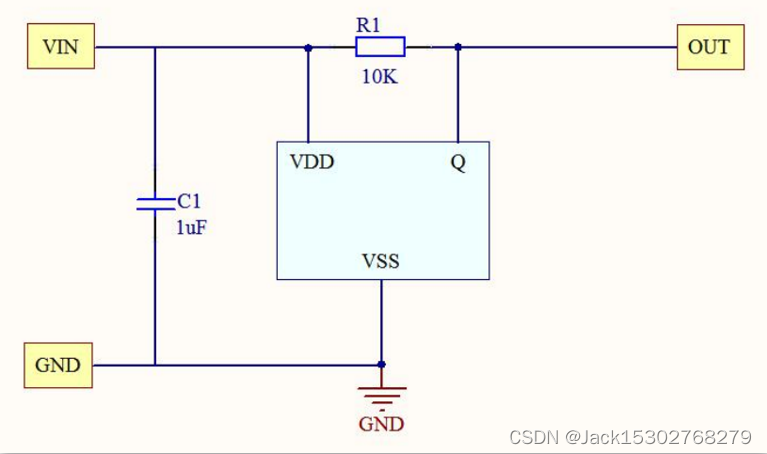
D02——低功耗 2.4V~5.5V电池供电 全极霍尔开关芯片,适用于手机或笔记本电脑等产品中
D02 是一款低功耗全极霍尔开关,用于检测施加的磁通量密度,并提供一个数字输出,该输出指示所感测磁通量幅度的当前状态。这些应用的一个例子是翻盖手机中的 ON/OFF 开关。 微功耗设计特别适合电池供电系统,如手机或笔记本电脑&…

机器视觉能不能再火爆?大多数企业订单减少是现实,大多数企业维持现有的经营状态将会非常困难,就看人工智能和新兴产业能不能破门而入
每个人都讲机器视觉代替大量人工,可是真的吗?没有订单,人工的存在都没必要,需要什么机器视觉检测。
我们首先有一个问题,机器视觉行业之前有没有火爆过? 有,但是出现短暂之后是内卷。深度学习A…
【ZED相机运行SLAM】
0.设备和环境
Ubuntu18.04ROS1 ZED 2i vins-fusion
1.安装ZED SDK
官方手册linux:https://www.stereolabs.com/docs/installation/linux/ 选择静默安装即可 The installer can be launched in silent mode with the – silent option (with a space between – and silent).…
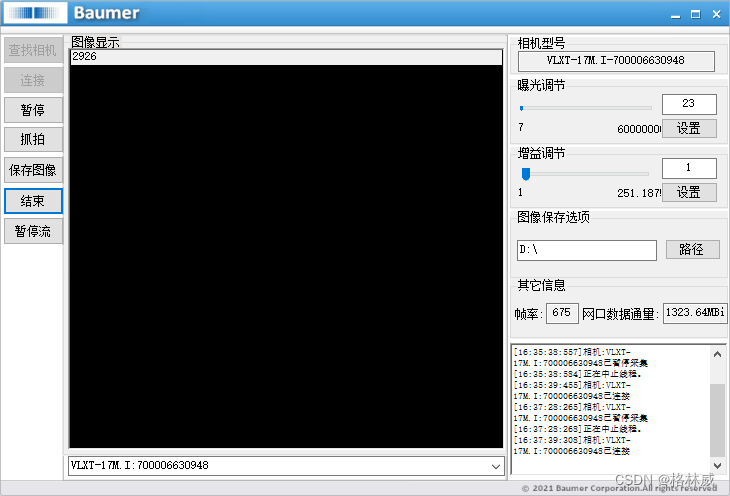
Baumer工业相机中曝光与增益两种功能的优点和作用以及使用方法
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有…
Unity填坑-灯光烘焙相关
Unity填坑-灯光烘焙相关 文章目录 Unity填坑-灯光烘焙相关前言一、Light的模式二、光的效果分类三、各种Light模式与烘焙的说明1.Realtime,实时光2.baked,烘焙光3.mixed,混合 四、实时全局光五、其他说明1.动态物体的全局光照效果2.手机使用烘焙注意的点3.其他设置 前言
项目组…
用于智驾车辆的相机-IMU外参监控
文章:Camera-IMU Extrinsic Calibration Quality Monitoring for Autonomous Ground Vehicles
作者:Xuesu Xiao , Yulin Zhang , Haifeng Li , Hongpeng Wang and Binbin Li
编辑:点云PCL 欢迎各位加入知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权…
七. 镜头知识之像圈与sensor感光面积
七. 镜头知识之像圈与sensor感光面积 文章目录 七. 镜头知识之像圈与sensor感光面积7.0 像圈7.1 芯片尺寸 --cmos sensor 芯片尺寸即为成像靶面大小7.4.1 1英寸——靶面尺寸为宽12.7mm*高9.6mm,对角线16mm7.4.1.1 sensor sc201cs7.4.1.2 sensor f377.2 Image Lens Format Size…
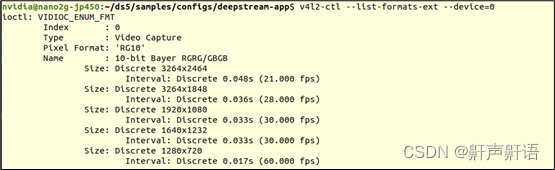
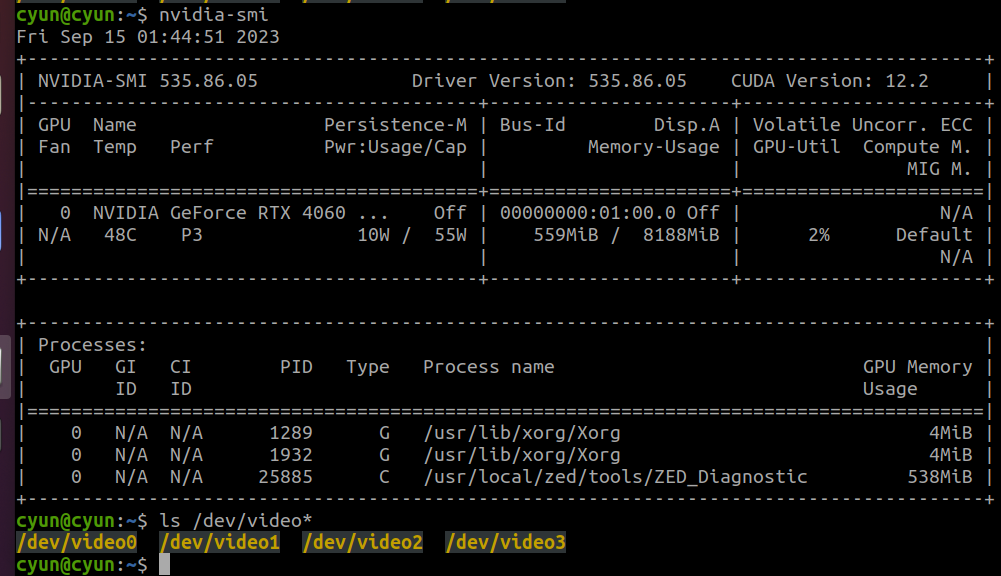
如何查看相机的配置信息,以及获取相机当前状态信息---deepstream
sudo apt-get install v4l2-utils
v4l2-ctl --list-devicesv4l2-ctl --list-formats-ext --device0
v4l2-ctl --list-formats-ext --device1参考链接: https://www.elecfans.com/d/1677110.html
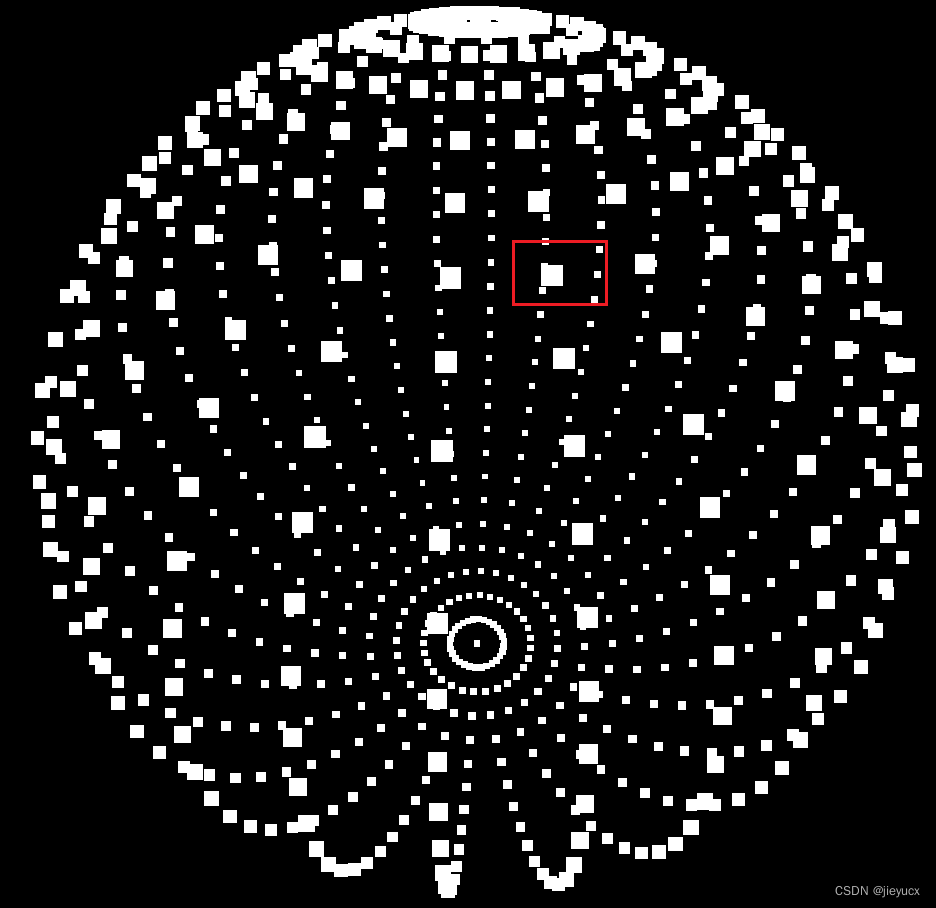
![[概述] 获取点云数据的仪器](https://img-blog.csdnimg.cn/a2782c674f8146d4b7e58c4c1c2e9acd.png)
[概述] 获取点云数据的仪器
这里所说的获取点云的仪器指的是可以获取场景中物体距离信息的相关设备,下面分别从测距原理以及适用场景来进行介绍。
一、三角测距法
三角测距原理
就是利用三角形的几何关系来测量物体的距离。想象一下,你站在一个地方,你的朋友站在另一…
【图像处理】看OpenCV如何实现相机校准
一、说明 在本教程中,将介绍计算机视觉的科学领域,以及相机校准过程的简要总结。计算机视觉是实现自主系统的尝试,这些系统可以实现“人类视觉”的某些功能,其中相机被认为是传感器之一(相当于人眼)。了解捕获图像的内容是一项关键任务,这些计算机视觉系统有几个共同的应…
ORBSLAM3 运行流程,以rgbd_tum.cc函数为例进行分析
一、运行 使用的是D435i相机自己录制的数据。
运行命令:
./Examples/RGB-D/rgbd_tum /opt/vslam/ORB_SLAM3_detailed_comments-dense_map_new/Vocabulary/ORBvoc.txt /opt/vslam/ORB_SLAM3_detailed_comments-dense_map_new/Examples/RGB-D/TUM1.yaml /opt/vsl…
高精度彩色3D相机:开启崭新的彩色3D成像时代
3D成像的新时代
近年来,机器人技术的快速发展促使对3D相机技术的需求不断增加,原因在于,相机在提高机器人的性能和实现多种功能方面发挥了决定性作用。然而,其中许多应用所需的解决方案更复杂,仅提供环境的深度信息是…

光学系统的核心--分辨率
前言
在机器视觉领域,可以把各个部件划分为光源,镜头,相机,采集卡,算法,运动平台等。各个部件都是系统的有机组合,均有各自的重要性。在实际应用中,成像镜头涉及的光学理论较多&…
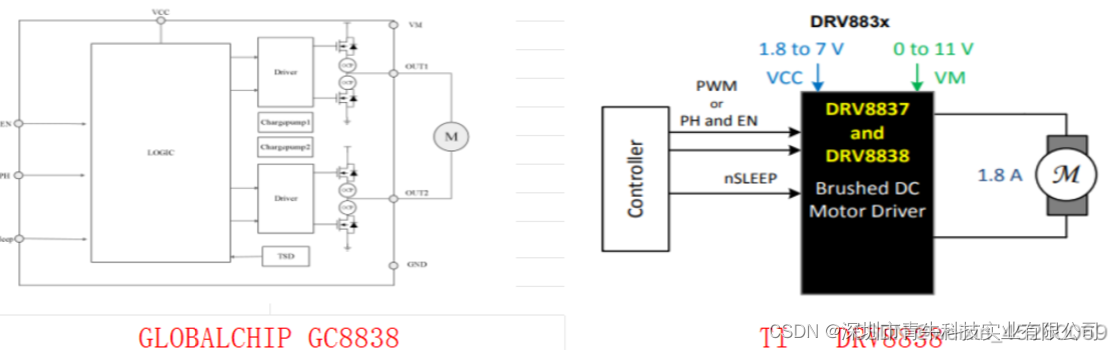
GC8838可替代DRV8838直流电机驱动芯片,应用于摄像机,消费类产品中
GC8838 一款 12V 直流电机驱动芯片,为摄像机、消费类产品、玩具和其他低压或者电池供电的运动控制类应用提供了集成的电机驱动解决方案。芯片一般用了驱动一个直流电机或者使用两颗来驱动步进电机。 可以工作在 0~12V 的电源电压上,能提供高达 1.5A 持续…
Baumer工业相机堡盟工业相机如何使用BGAPI SDK控制相机数据流的开启和关闭(C#)
Baumer工业相机堡盟工业相机如何使用BGAPI SDK控制相机数据流的开启和关闭(C#) Baumer工业相机Baumer工业相机BGAPI SDK的技术背景Baumer工业相机使用BGAPISDK控制相机数据流的方式1.引用合适的类文件2.使用BGAPISDK控制相机数据流的方式2.使用BGAPISDK控…
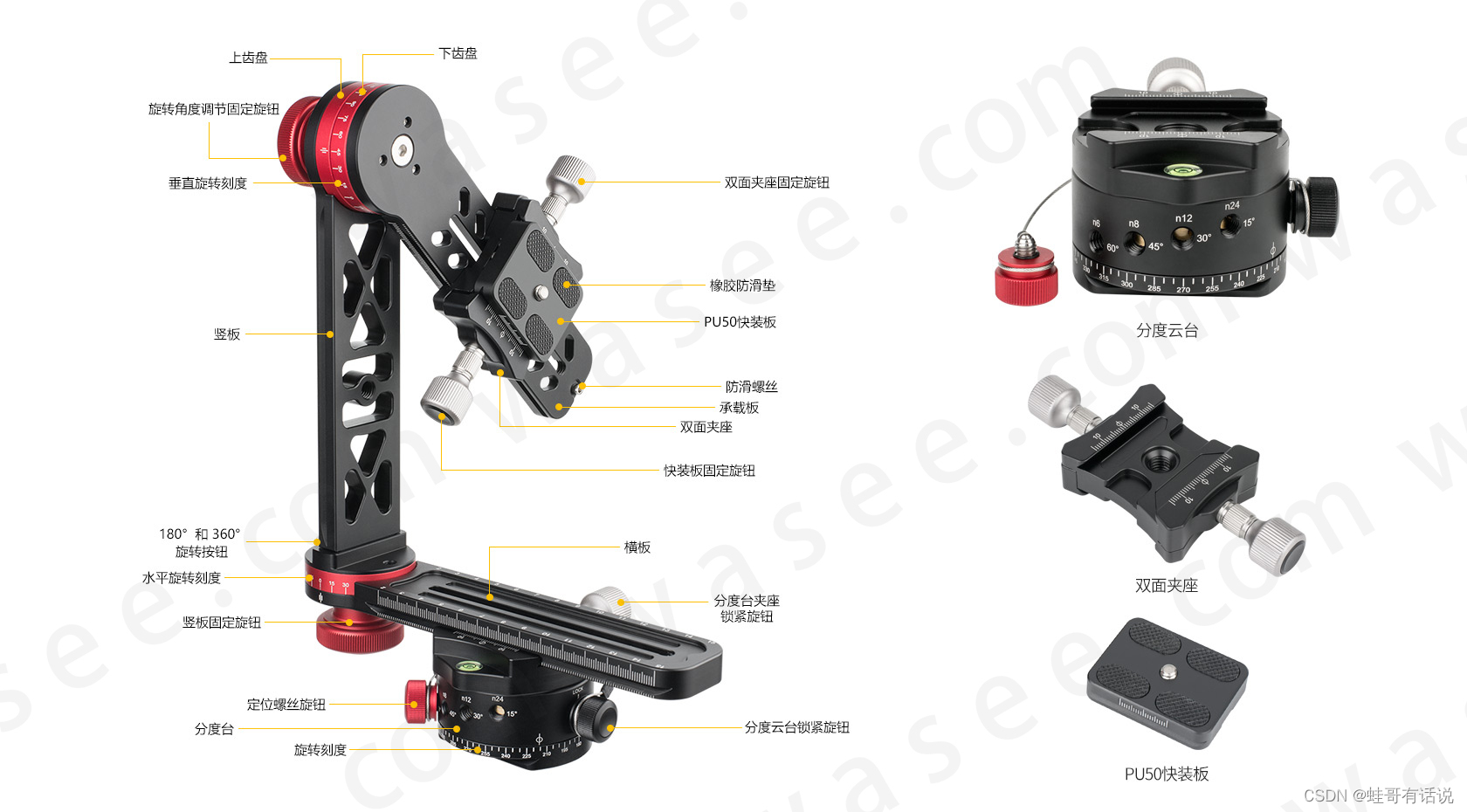
0基础学习VR全景平台篇第133篇:720VR全景,组装云台和脚架
一、设备概述
1.云台 云台是安装、固定照相机的支撑设备,也作为连接相机与三脚架的装置。它分为固定和电动云台两种。对于照相机而言,固定云台适用于拍摄镜头少的情况,也有可靠性高、相对便携的特点。在固定云台上安装好照相机后可调整相机的…
哪些行业装配柔性线路板 (FPC)时用到UV胶水?
柔性线路板(FPC)因其可弯曲和轻薄的特性,在多种行业和应用中都有广泛的应用。以下是一些常见的行业和场景,它们在装配FPC时可能使用UV胶水: 1.电子产品制造:
移动设备:如智能手机、平板电脑和可…
【android开发-21】android中调用系统摄像头camera拍照和相册的用法详解
1,调用摄像头
在Android中,调用系统摄像头拍照需要使用Intent来启动Camera应用,并在应用中设置相应的权限。下面是一个简单的例子:
// 创建一个Intent对象,指定要执行的动作是拍照
Intent intent new Intent(Medi…

Android 13 定制化开发--开启相机或麦克风时,去掉状态栏上的绿色图标
Android 12 或更高版本的设备上,当应用使用麦克风或相机时,图标会出现在状态栏中。如果应用处于沉浸模式,图标会出现在屏幕的右上角。用户可以打开“快捷设置”,并选择图标以查看哪些应用当前正在使用麦克风或摄像头。图 1 显示了…
虚幻UE5Matehuman定制自己的虚拟人,从相机拍照到UE5制作全流程
开启自己的元宇宙,照片扫描真实的人类,生成虚拟形象,保姆级教程,欢迎大家指正。
需要的软件: 制作流程:
一.拍照。
围绕自己拍照,大概20多张图就差不多了,把脑门漏出来,无需拍后脑勺。 拍照方式
例如,拍照时尽量不要在脸上体现出明显的光源方向。
Baumer工业相机堡盟工业相机如何使用OpenCV实现相机图像的显示(C++)
Baumer工业相机堡盟工业相机如何使用OpenCV实现相机图像的显示(C) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里使用OpenCV实现相机图像的显示联合OpenCV实现相机图像的显示测试演示图 工业相机通过使用OpenCV实现…

美颜技术的创新之路——美颜SDK的原理与应用探究
随着科技的不断发展,手机相机已经成为人们记录生活的重要工具。然而,拍照时的颜值问题却一直困扰着人们。为了解决这一难题,美颜技术应运而生。而美颜SDK作为美颜技术的一种应用,更是在不断地创新和发展中。本文将着重探究美颜SDK…
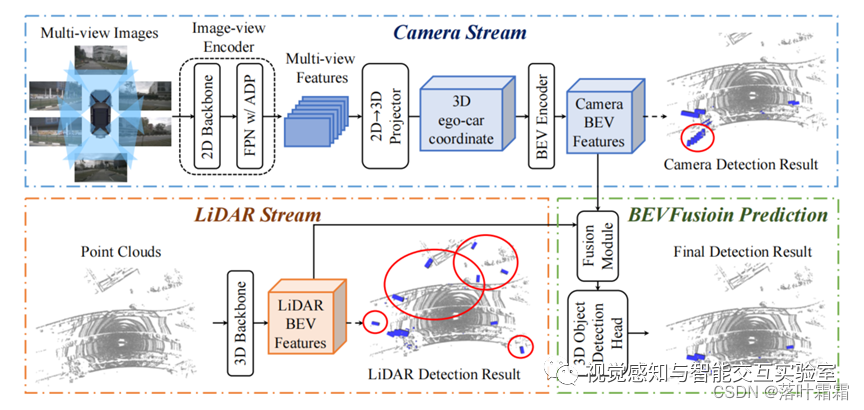
【BEV感知算法概述——下一代自动驾驶感知算法】
文章目录 BEV感知算法概念BEV感知算法数据集介绍BEV感知算法分类BEV感知算法的优劣小结 BEV感知算法概念
Bird’s-Eye-View,鸟瞰图(俯视图)。BEV感知算法存在许多的优势。
首先,BEV视图存在遮挡小的优点,由于视觉的透…

three.js从入门到精通系列教程002 - three.js正交相机OrthographicCamera
<!DOCTYPE html>
<html><head><meta charset"UTF-8"><title>three.js从入门到精通系列教程002 - three.js正交相机OrthographicCamera</title><script src"ThreeJS/three.js"></script><script src&qu…

DJI Osmo Pocket 3:口袋里的影像创作利器
据推测,DJI Osmo Pocket 3 是 DJI 将于 2023 年 11 月发布的一款口袋云台相机,是 Osmo Pocket 系列的第三代产品。Osmo Pocket 3 在前代产品的基础上进行了全面升级,在画质、性能、功能等方面都有了明显提升,是一款非常值得入手的…
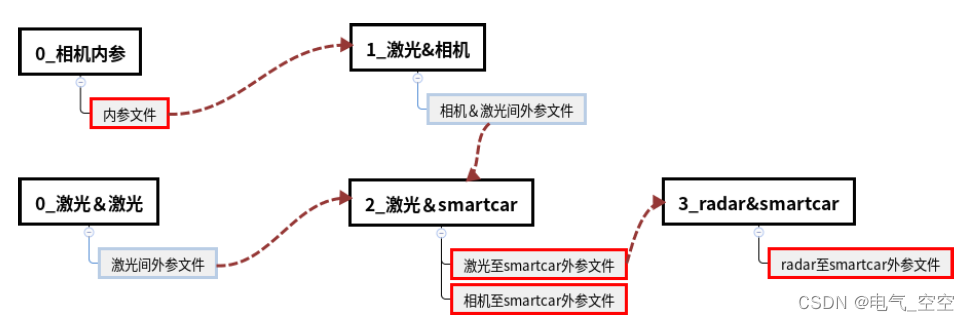
自动驾驶感知传感器标定安装说明
1. 概述 本标定程序为整合现开发的高速车所有标定模块,可实现相机内参标定和激光、相机、前向毫米波 至车辆后轴中心标定,标定参数串联传递并提供可视化工具验证各个模块标定精度。整体标定流程如下,标定顺序为下图前标0-->1-->2-->3,相同编号标定顺序没有强制要求…
雷达得基本概念--关键词
虚拟通道:虚拟接收天线数量,发送天线*接收天线数量 chirps :一个发射波 导向矢量:本质上是描述空间相位差 空间相位差:是指的两个或多个波动现象(如电磁波或声波)在空间中的相对位置或阶段的差异…

Unity 3D基础——缓动效果
1.在场景中新建两个 Cube 立方体,在 Scene 视图中将两个 Cude的位置错开。 2.新建 C# 脚本 MoveToTarget.cs(写完记得保存)
using System.Collections;
using System.Collections.Generic;
using UnityEngine;public class MoveToTarget : M…

Learning to Super-resolve Dynamic Scenes for Neuromorphic Spike Camera论文笔记
摘要
脉冲相机使用了“integrate and fire”机制来生成连续的脉冲流,以极高的时间分辨率来记录动态光照强度。但是极高的时间分辨率导致了受限的空间分辨率,致使重建出的图像无法很好保留原始场景的细节。为了解决这个问题,这篇文章提出了Sp…
线阵相机系列-- 1. 什么是线阵相机
线阵相机的概念
根据工业相机像素排列方式的不同,分为面阵相机和线阵相机。面阵相机的像素排列为一个完整的面,一次获取整幅二维图像,而线阵相机的像素以一条线排列,每次得到的图像呈现出一条线,通过设置扫描频率以及…
HelixToolkit使用教程
HelixToolkit使用总结:
问题点: 3d光源 相机 网格信息
1、配置HelixViewPort3d基本参数
2、配置相机参数和相机位置:HelixViewPort3D.DefaultCamera 设置相机的放置方向和观看位置 <hv:HelixViewport3D.DefaultCamera><PerspectiveCamera Lo…

Opencv实验合集——实验八:相机校准
1.定义
首先,我们来理解一下怎么从相机的角度去看一张图片,就好比如你用眼睛作为相机来进行摄影,但是比摄影机强的是,你是怎么摄影图片之后再将它矫正出现在你眼前,将歪歪扭扭的图片变成一张在你眼前是一张直的图片 为…
使用带有 Moveit 的深度相机来避免碰撞
文章目录 什么是深度相机?如何将 Kinect 深度相机添加到您的环境中在 Rviz 中可视化深度相机数据在取放场景中使用深度相机将深度相机与您的 Moveit 设置一起使用有很多优势。机器人可以避免未知环境中的碰撞,甚至可以对周围的变化做出反应。然而,将深度相机连接到您的设置并…

3DMAX同一个文件,同事电脑渲染的是正常的,我渲染的曝光高为什么?3dmax渲染曝光怎么办呐?
同一个文件,但是不同版本,不同渲染器可能导致渲染的效果不一样也是属于一种现象。
首先根据问题解决,渲染曝光有以下几种可能:
1.对比度过高
在3dmax中按数字【8】,打开环境与效果,点击亮度和对比度 查…
Unity3D 基础——使用 Vector3.Lerp 实现缓动效果
让一个物体从当前位置移动到另一个位置 Vector3-Lerp - Unity 脚本 APIhttps://docs.unity.cn/cn/current/ScriptReference/Vector3.Lerp.html
1.在场景中新建两个 Cube 立方体,在 Scene 视图中将两个 Cude的位置错开。 2.新建 C# 脚本 MoveToTarget.cs(…
three.js 使用 tweenjs绘制相机运动动画
效果: 代码:
<template><div><el-container><el-main><div class"box-card-left"><div id"threejs" style"border: 1px solid red"></div><div class"box-right"…
Cesium屏幕中心坐标和相机位置坐标计算
1.获取当前屏幕中心点的位置 getCenterPosition() {let centerResult viewer.camera.pickEllipsoid(new Cesium.Cartesian2(viewer.canvas.clientWidth / 2,viewer.canvas.clientHeight / 2,),)centerPoint centerResult;let curPosition Cesium.Ellipsoid.WGS84.cartesianT…

【单目测距】单目相机测距(三)
文章目录 一、前言二、测距代码2.1、地面有坡度2.2、python代码2.2.1、旋转矩阵转角度2.2.2、角度转旋转矩阵2.2.3、三维旋转原理 (Rotation 原理)2.2.4、完整代码 2.3、c 代码 一、前言 上篇博客【单目测距】单目相机测距(二) 有讲到当相机不是理想状态…
如何使用手机提高拍照水平
使用手机提高拍照水平的一些技巧包括:
1.熟悉相机应用:了解相机应用的各种设置和功能,包括曝光、对焦、白平衡等,可以更好地控制拍照效果。
2.照明:注意光线的条件,尽量选择光线明亮、柔和的环境。避免背…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前数据吞吐量(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK里函数来获取相机当前数据吞吐量(C) Baumer工业相机Baumer工业相机的数据吞吐量的技术背景CameraExplorer如何查看相机吞吐量信息在NEOAPI SDK里通过函数获取相机接口吞吐量 Baumer工业相机通过NEOAPI SDK获…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C#) Baumer工业相机Baumer工业相机的帧率的技术背景Baumer工业相机的帧率获取方式CameraExplorer如何查看相机帧率信息在NEOAPI SDK里通过函数获取相机帧率 Baumer工业相机通过NEOAPI…

海康线扫相机平场校正/阴影校正教程
机器视觉海康visionmaster-字符快速识别,字符缺陷检测 为什么要对线阵相机进行平场矫正(PRNUC)
线阵相机需要平场矫正(PRNUC)主要是因为获取得图像有异常,如图像边缘亮度与中心亮度不一致情况等,
对于现场使用相机获取图像数据有较大影响,故而需要对线阵相机进行平场矫…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在NEOAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过NEOAPI SDK设置相机固定…
Baumer工业相机堡盟相机使用BGAPISDK联合Halcon直接进行彩色图像显示(Color)(C#)(将图像数据Buffer转为HObject)
Baumer工业相机堡盟相机使用BGAPISDK联合Halcon直接进行彩色图像显示(Color)(C#)(将图像数据Buffer转为HObject) Baumer工业相机Baumer工业相机SDK联合Halcon的技术背景代码分析1.引用合适的类文件2.在相机…
相机图像质量研究(9)常见问题总结:光学结构对成像的影响--工厂镜头组装
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

聚对苯二甲酸乙二醇酯PET的特性有哪些?UV胶水能够粘接聚对苯二甲酸乙二醇酯PET吗?又有哪些优势呢?
聚对苯二甲酸乙二醇酯(Polyethylene Terephthalate,PET)是一种常见的塑料材料,具有许多特性,包括: 1.化学式: PET的化学式为 (C10H8O4)n,其中n表示重复单元的数量。
2.透明度&#…

使用Halcon 采集图像并进行简单处理rgbl_to_gray/threshold/connection/fill_up
使用Halcon 采集图像并进行简单处理 文章目录 使用Halcon 采集图像并进行简单处理 下面介绍一个简单的采集图像的例子。在Halcon中利用图像采集接口,使用USB3.0相机实时拍摄图像。采集到图像后对图像进行简单的阀值分割处理,将有物体的区域标记出来。 &a…

多USB工业相机的使用
USB相机的使用
USB3.0引入了“SuperSpeed”(SS)传输速率。理论传输速度高达625 MByte/s, SuperSpeed传输可以在短时间内传输大量数据,适用于许多视觉应用。给出的带宽上限是一个理想化的理论值。对于实际应用,主机控制器(Host Controller&am…

Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C) Baumer工业相机Baumer工业相机通过SDK实现Raw格式的图像保存的技术背景通过SDK获取相机信息的代码分析Baumer工业相机回调函数里保存原始图像数据Baumer保存Raw图像格式重要核心代…

自动驾驶中的LFM(LED 闪烁缓解)问题
自动驾驶中的LFM Reference:
自动驾驶系统如何跨越LFM这道坎?
从路灯、交通灯,到车载照明,低功耗、长寿命、高可靠的 LED 正在快速取代传统照明方式。但 LED 在道路上的普遍使用,却带来“LED闪烁”现象。“LED闪烁”是由 LED 驱…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK修改图像像素格式Mono8或者Mono10(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK修改图像像素格式Mono8或者Mono10(C#) Baumer工业相机Baumer工业相机的图像像素格式的技术背景CameraExplorer如何查看修改相机图像像素格式信息在NEOAPI SDK里通过函数修改图像像素格式修改像素格式测试演…
激光雷达标定入门(11)相机和雷达联合标定数据录制
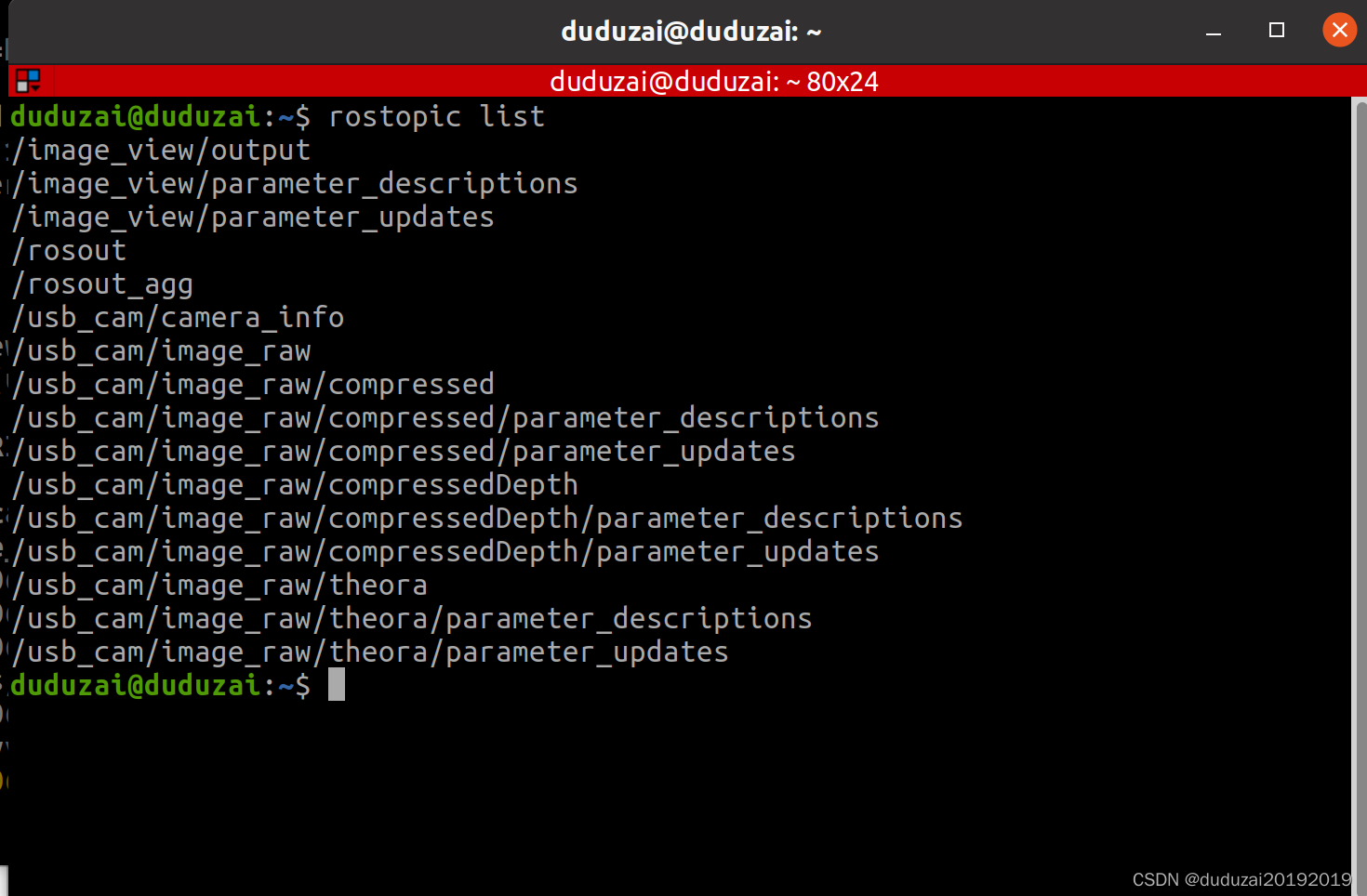
先用以下命令查看节点流:
rqt_graph可以看到激光雷达和相机的话题分别为/lslidar_point_cloud 和 /image_view 。
但实际的话题会很多,所以最好列一下话题,拿一下想要的话题即可
rostopic list下面录制包,录制的前提必须把相机…
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
数字图像和光学图像的区别?
如果您曾经尝试在走路时在手机上拍摄视频,您就会知道保持图像静止是很棘手的。有一些巧妙的技术旨在减少这种摇晃的凸轮效应,并且有两种不同的方法来实现它。
光学图像稳定来自静态摄影领域,使用镜头内部的复杂硬件机制来保持图像静止并实现…
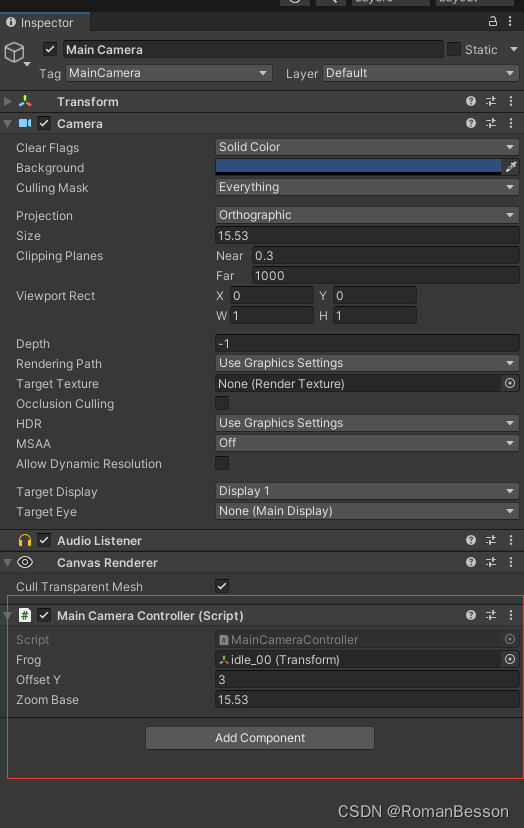
相机围绕物体旋转,并且有Y轴角度限制
相机围绕物体旋转,并且有Y轴角度限制,可通过parameters.offset 修改使目标物不在画面中心
using UnityEngine; using System.Collections; using System.Collections.Generic; using UnityEngine.EventSystems; using UnityEngine.UI;
public class CameraController : Mon…

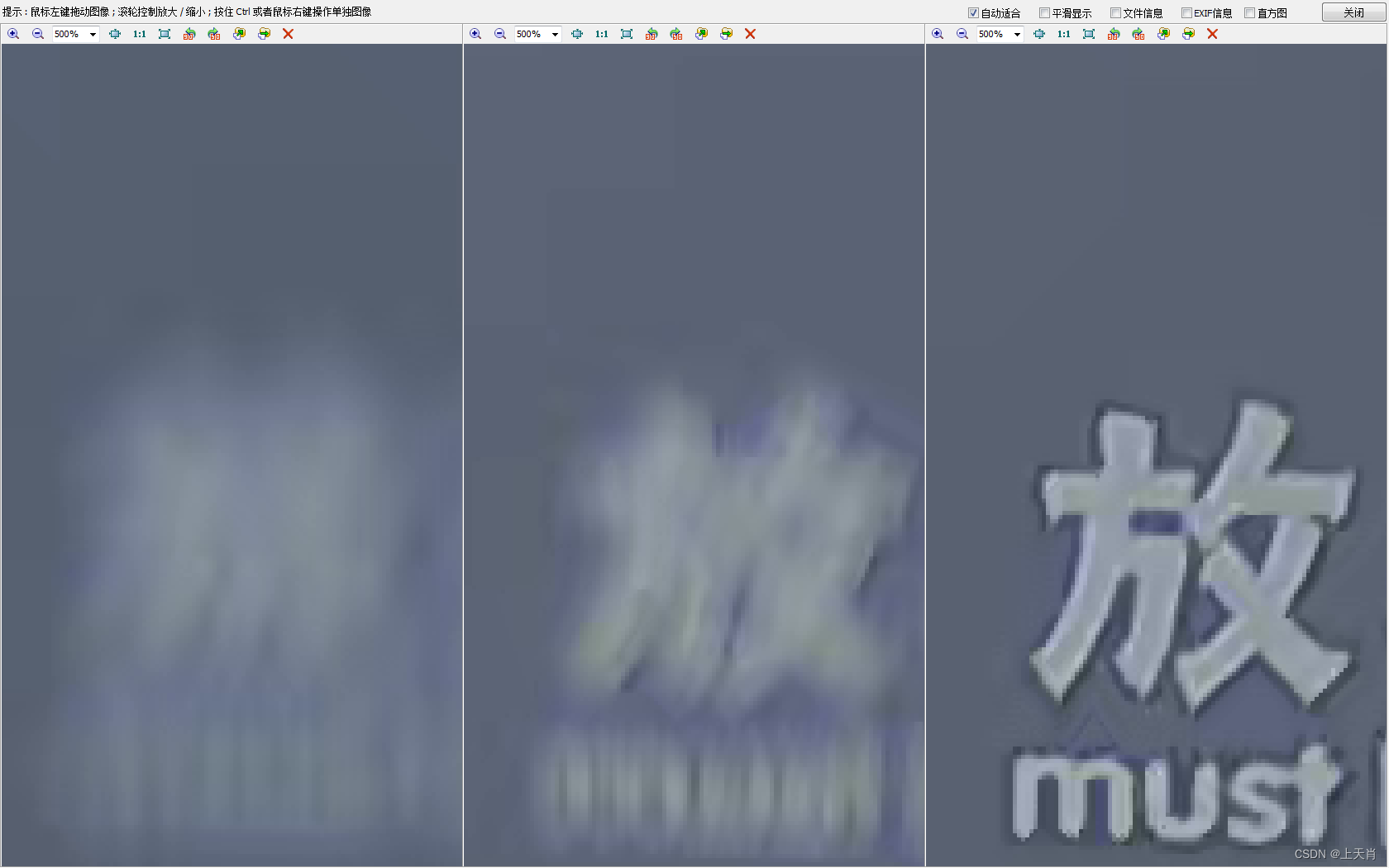
Baumer工业相机堡盟相机如何使用Sharpening图像锐化功能( Sharpening图像锐化功能的优点和行业应用)(C++)
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…
Nvidia VPI 双目相机生成深度图
nVidia VPI(Vision Programming Interface)提供了多种后端,用于执行图像处理和计算机视觉操作。不同的后端针对不同的硬件和用例进行了优化。这些后端包括:
1. CPU: 这是最通用的后端,它运行在标准的中央处理器&#…

CCD相机为什么需要积分球均匀光源
积分球内腔是一个具备高漫反射特性的收光球,其内部中空、内球面均匀地涂有漫反射材料,具有匀光与混光的作用,因此常常被用来做收光的均光球。由于光源性能等因素的影响,可能导致出射光线带偏振方向、出光不均匀,使用积…
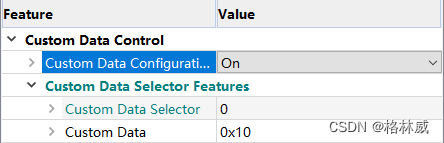
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机本身的数据保存(CustomData)功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机本身的数据保存(CustomData)功能(C#) Baumer工业相机Baumer工业相机的数据保存(CustomData)功能的技术背景CameraExplorer如何使用图像剪切ÿ…
FPC柔性线路板使用UV胶水的优势有哪些?
UV胶水在FPC柔性线路板的装配中具有明显的优势: 快速固化
UV胶水在紫外线照射后10秒左右迅速固化,因此它能够在短时间内完成连接。这非常有助于实际工业作业中提高生产效率,特别是在需要大批量生产的情况下。
精确控制固化时间
UV胶水的固…
苹果相机怎么磨皮 苹果手机怎么磨皮
相信使用苹果相机的小伙伴都有这样的疑惑,苹果相机怎么磨皮?其实可以通过相机的参数进行设置从而达到磨皮的效果,如果觉得相机自带的设置磨皮效果不够好,可以下载磨皮软件来对照片磨皮。今天的文章就来给大家介绍苹果相机怎么磨皮…
什么是星光级 Sensor ?
1、问题背景:上周老大打电话 call 我,问我们平台上是否有调过星光级的 sensor (估计是在外面出差被客户问到了,所以找我确认一下)。我回复说 sensor 没有星光级的概念,关于星光级,它是从产品来定…

基于单目相机的2D测量(工件尺寸和物体尺寸)
目录 1.简介
2.基于单目相机的2D测量
2.1 想法:
2.2 代码思路
2.2 主函数部分 1.简介
基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。 工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2…
双目测距工程Stereo-Vision-master学习笔记
硬件: 首先要要把两个摄像头固定到支架上,并且两个摄像头的间距应该在110mm,两个摄像头没有落差 相机的内参数包括焦距、主点坐标、像素尺寸等,这些参数决定了相机成像的几何变换关系。内参数是相机固有的属性,不会随…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置硬件触发模式(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置硬件触发模式(C) Baumer工业相机Baumer工业相机NEOAPI SDK和硬件触发模式的技术背景Baumer工业相机通过BGAPISDK设置硬件触发模式功能1.引用合适的类文件2.通过BGAPISDK在Line0上施加12V/24V电压信号实…

Unity3d Cinemachine篇(三)— FreeLook
文章目录 前言一、使用FreeLook制造第三人称跟随效果1. 创建一个游戏物体2. 创建FreeLook相机4. 完成 前言
上一期我们简单的使用了Dolly CamerawithTrack相机,这次我们来使用一下FreeLook 一、使用FreeLook制造第三人称跟随效果
1. 创建一个游戏物体 游戏物体比较…

人工视觉仍然需要图像采集卡
最初,图像采集卡被用作模拟视频数字转换器和图像缓冲器,但如今它们能够执行复杂的任务,例如图像处理。图像采集卡的设计不断发展,旨在提高系统性能并减少计算机处理需求。
除了图像采集之外,图像采集卡还执行机器视觉…
Android Camera开发入门(3):CameraX的使用
Android Camera开发入门(3):CameraX的使用 CameraX API简介 在前两篇博客中,我们介绍了Camera基础知识和Camera2 API的使用。为了进一步简化相机应用开发,Google推出了CameraX API,它提供了一个更加简洁、易于使用的接口,帮助开发者快速实现高质量的相机功能。本篇博客将…

通过电脑屏幕传输文件
简介
本文介绍一套用于通过屏幕传输文件信息的软件。
通过屏幕传输文件,即非接触式,非插入式传递文件,是除了常用的网络传输,硬盘类介质拷贝之外的文件信息传输方式,基本原理就是将待传输的文件转换为二维码…
三维重建:技术及实际应用
摘要:本文将探讨计算机视觉领域中的三维重建技术,以及它们在实际项目中的应用。我们将重点介绍一个基于双目视觉的三维重建项目,并详细解释项目步骤及相关代码。
正文:
三维重建是计算机视觉领域的一个重要研究方向。通过从图像…
合成相机模型【图形学】
相机在计算机图形学中有两个方面的考虑:相机的位置和相机的形状。 要了解后者,我们需要了解相机的工作原理。 NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - R…
BEV(2)----BEVDepth
1 模型简介
常见的自底向上方法的会显示的估计每个特征点的距离,但是这些距离是隐式学习的,在BEVDepth中会利用lidar的点云来监督预测出来的深度,使得预测的距离更加接近真实值。此外,考虑到相机外参可能会对结果进行干扰&#x…
相机的机身马达有什么用?
新手疑问:
为什么我的尼康D3200相机明明拥有拍视频能力,但是拍摄视频时却不能对焦
科普时间
那是因为你的相机缺少机身马达,并且你所使用的镜头也没有马达!机身马达是用于给镜头提供对焦动力的装置。它的作用是使相机具备自动对焦功能。如…

友思特分享 | 量产发布:首款在实时视频流中实现AI感知叠加的工业相机
友思特 IDS NXT malibu 的推出
标志着新一代智能工业相机的诞生
实现在设备端实时视频流与AI感知的叠加! 实现AI流媒体
智能工业相机 malibu 采用了 Ambarella 最初用于运动相机的特殊芯片,可以高速(>25fps)实现全高清压缩视…
浅析倾斜摄影三维模型(3D)几何坐标精度偏差的几个因素
浅析倾斜摄影三维模型(3D)几何坐标精度偏差的几个因素 倾斜摄影是一种通过倾斜角度较大的相机拍摄建筑物、地形等场景,从而生成高精度的三维模型的技术。然而,在进行倾斜摄影操作时,由于多种因素的影响,导致…
Omniverse Replicator的“Hello World”
核心功能——Replicator的“Hello World”
学习目标
本教程的目的是介绍基本的 Omniverse Replicator 功能,例如使用一些预定义的 3D 资产创建一个简单的场景,应用随机化,然后将生成的图像写入磁盘以进行进一步处理。
使用复制器 API
要运…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK使用UserSet功能保存和载入相机的各类参数(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK使用UserSet功能保存和载入相机的各类参数(C#)Baumer工业相机Baumer工业相机BGAPISDK中UserSet的技术背景代码案例分享第一步:保存相机当前参数设置UserSet_Save第二步:载入已经保存的…

有仰拍相机和俯拍相机时,俯拍相机中心和吸嘴中心的标定
俯拍相机中心和吸嘴中心的标定 文章目录 俯拍相机中心和吸嘴中心的标定 前言适用模型如下:一、使用一个标定片进行标定1.关键注意:2.标定步骤: 二、使用一个L型的工件1.关键注意:2.标定步骤: 总结 前言
在自动化设备领…
Baumer工业相机堡盟工业相机如何通过NEOAPISDK设置软件触发模式(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPISDK设置硬件触发模式(C#) Baumer工业相机Baumer工业相机NEOAPISDK和软触发模式的技术背景Baumer工业相机通过NEOAPI SDK设置软件触发模式功能1.引用合适的类文件2.通过NEOAPI SDK实现软件触发采集图像的功能 Ba…
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用HDR功能(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用HDR功能(C#) Baumer工业相机Baumer工业相机BGAPISDK和HDR功能的技术背景Baumer工业相机通过BGAPISDK使用HDR功能1.引用合适的类文件2.通过BGAPISDK使用HDR高动态范围功能3.通过BGAPISDK关闭HDR高动态范围…
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的Pow伽马变换算法增强(C#)
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的Pow伽马变换算法增强(C#) Baumer工业相机Baumer工业相机使用图像算法增加图像的技术背景Baumer工业相机通过BGAPI SDK联合Halcon使用Pow伽马变换增强算法1.引用合适的类文件2.BGAPI SDK在图…
Unity 渲染顺序受哪些影响(相机depth、SortingLayer、Render Queue、透明)
目录 相机深度(Camera Depth)
Clear Flags
多相机渲染不同部分
SortingLayer
先后顺序
Render Queue
Render Queue的作用
Render Queue的分类
GeometryLast(值为2500)
渲染顺序总结 相机深度(Camera Depth&am…
kalibr相机标定和IMU标定
相机标定 打印标定板和对应的aprilgrid.yaml target_type: aprilgrid #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.038 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ra…

光栅化渲染:可见性问题和深度缓冲区算法
在前面第二章中,我们了解到,在投影点(屏幕空间中的点)的第三个坐标中,我们存储原始顶点 z 坐标(相机空间中点的 z 坐标): 当一个像素与多个三角形重叠时,查找三角形表面上…
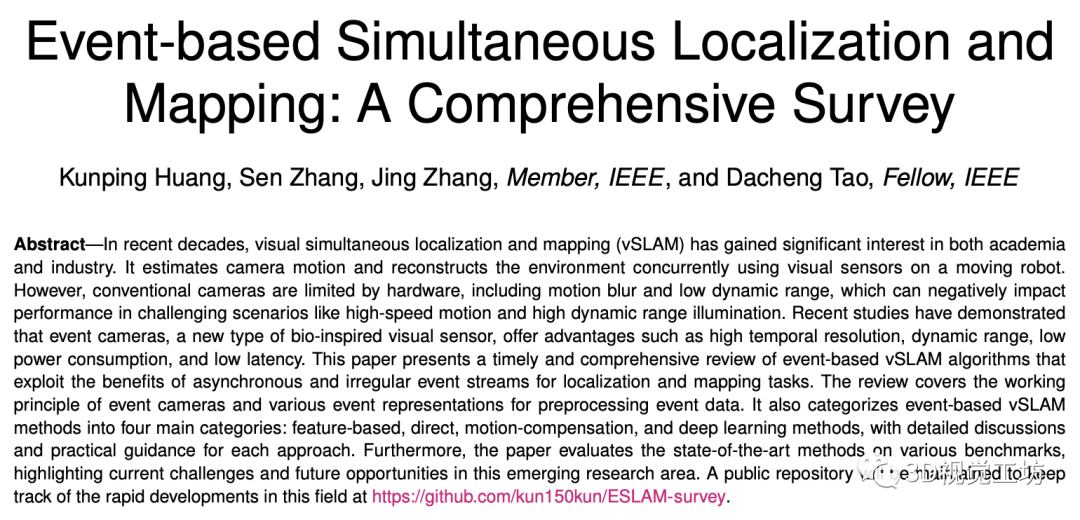
最新|事件相机SLAM综述
Arxiv链接:https://arxiv.org/abs/2304.09793 Github 链接:https://github.com/kun150kun/ESLAM-survey 视觉SLAM (vSLAM)是指移动机器人通过相机感知外部世界并估计机器人的位姿和重建周围环境的三维地图。vSLAM在各种应用中扮演着不可或缺的角色,包括自动驾驶,机器人导航…
Baumer工业相机堡盟工业相机如何使用BGAPI SDK解决两个万兆网相机的同步采集不同步的问题
Baumer工业相机堡盟工业相机如何使用BGAPI SDK解决两个万兆网相机的同步采集不同步的问题 Baumer工业相机Baumer工业相机图像数据转为Bitmap的技术背景Baumer同步异常 :客户使用两个Baumer万兆网相机进行同步采集发现FrameID相同,但是图像不同步细节原因…
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明二
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明二 Baumer工业相机Baumer工业相机CE软件图像/视频存储功能Baumer工业相机CE软件记录日志文件功能Baumer工业相机CE软件查看图像Buffer及数据流统计信息 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质…

0基础学习VR全景平台篇第128篇:720VR全景拍摄设备推荐
上课!全体起立~
大家好,欢迎观看蛙色官方系列全景摄影课程!
本篇教程,小编为大家推荐720VR全景拍摄所需要的设备器材。上节我们提到,理论上任意相机和镜头都能够拍摄全景,但为了标准化制作流程࿰…
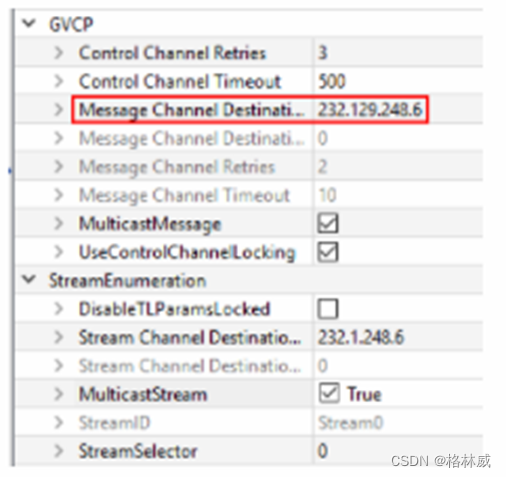
Baumer工业相机堡盟相机如何实现多播(组播)功能
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…

Stable Diffusion 准确绘制人物动作及手脚细节(需ControlNet扩展)
目前AI绘图还是比较像开盲盒,虽然能根据语义提供惊艳的图片,但是与设计师所构思的目标还是有一定距离。 那像我们这种没有绘画功底的程序员想要制作出心中的人物(尤其手脚)姿态,该怎样减少随机开盒的次数呢?…
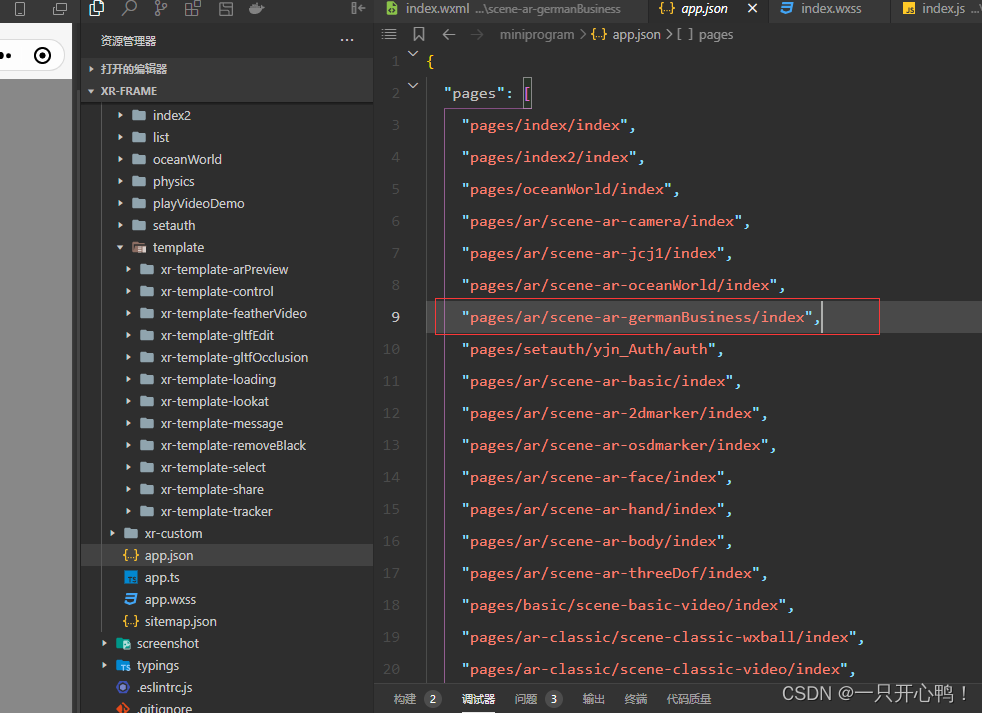
微信小程序调取相机实现拍照/录屏
1.效果
2.创建子组件 index.wxml代码
<xr-scene id"xr-scenecameraglb" ar-system bind:ready"handleReady" bind:ar-ready"handleARReady" >
<!-- 初始化模型 --><xr-assets bind:loaded"handleAssetsLoaded">…

相机标定:理论与实践
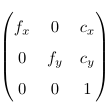
先讨论相机模型,说明投影关系的描述,介绍相机的内外参,最后完成标定。
一、内参含义
把需要标定的相机参数叫做内参(intrinsics matrix),它决定了物体的实际位置Q在成像平面上的投影位置q,如下…
VUE+THREE.JS 点击模型相机缓入查看模型相关信息
点击模型相机缓入查看模型相关信息 1.引入2.初始化CSS3DRenderer3.animate 加入一直执行渲染4.点击事件4.1 初始化renderer时加入监听事件4.2 触发点击事件 5. 关键代码分析5.1 移除模型5.2 创建模型上方的弹框5.3 相机缓入动画5.4 动画执行 1.引入 引入模型所要呈现的3DSprite…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C#) Baumer工业相机Baumer工业相机的Bufferlist序列功能的技术背景CameraExplorer如何查看相机Bufferlist功能在BGAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过BGAPI SDK…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C#) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)…
11.机器人系统仿真搭建gazebo环境、仿真深度相机、雷达、RGB相机
目录 1 gazebo仿真环境搭建
1.1 直接添加内置组件创建仿真环境
1.2 urdf、gazebo、rviz的综合应用
2 ROS_control
2.1 运动控制实现流程(Gazebo)
2.1.1 已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加传动装置以及控制器
…
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明 Baumer工业相机Baumer工业相机图像采集功能Baumer工业相机图像基本参数设置 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计…
H5调用安卓原生相机API案例
1、在activity_main.xml文件里添加webview标签
<WebViewandroid:id="@+id/webview"android:layout_width="match_parent"android:layout_height="match_parent">
</WebView>
2、AndroidManifest.xml(权限和活动声明)
开启访问…

拍摄视频的时候相机断电导致视频文件损坏,怎么修复
3-4
现在好多人都有自己的相机,但是专业用来录像的机器应该是不太可能都有的,相机的稳定性会比专业的机器差一些,如果用于比较重要的场景,比如婚庆、会议录像、家庭录像使用等,有较少的概率会出现一些奇怪的情况&…
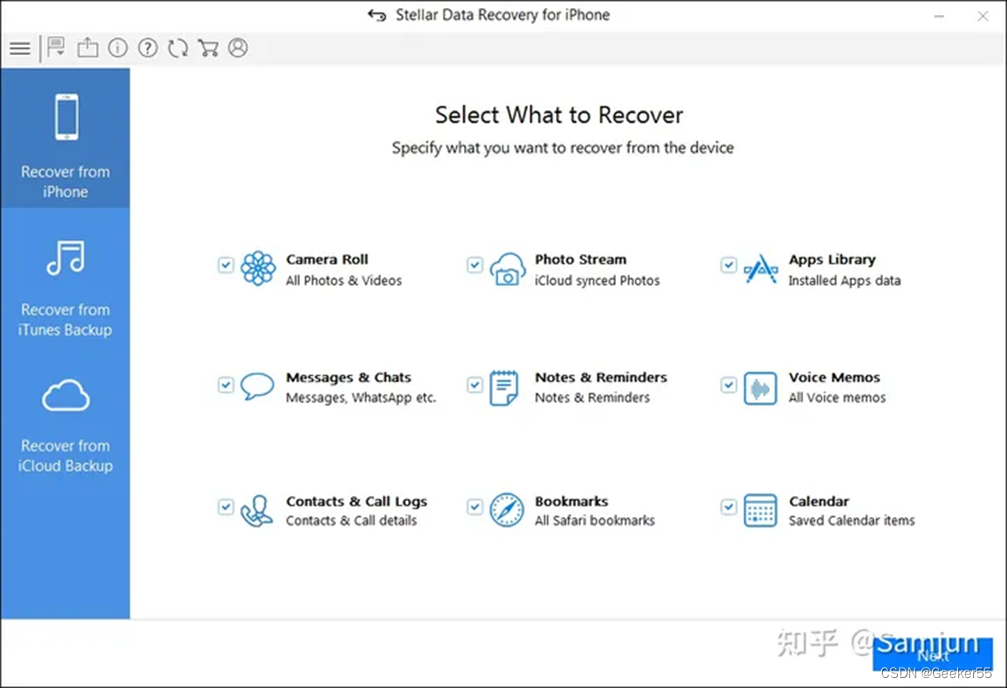
2023年十大最佳 iPhone 恢复软件
您的 iPhone 存储了大量有价值的数据,包括照片和视频。但是,即使使用高度安全的 Apple 设备,数据丢失也可能随时发生。从众多可用工具中选择最适合 iPhone 的数据恢复软件可能是一项艰巨的任务。因此,我们测试了性能并审查了 2023…
微信小程序相机相册授权后,需要重启客户端才能正常调用相机,无法调起窗口选择图片,无反应解决方案
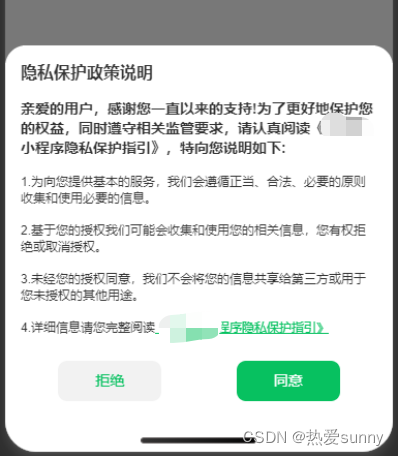
最近微信小程序很多功能突然不能使用,本篇针对无法调起相册进行说明 解决方案
检查小程序隐私协议是否配置,操作步骤这里不在详细说明,点击教程按照上面的教程,找到入口后点击完善或者更新 选择选中的照片或视频这个权限要申请 之…
相机图像质量研究(6)常见问题总结:光学结构对成像的影响--对焦距离
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
机器视觉系统选型-线阵工业相机选型
线阵相机特点:
1.线阵相机使用的线扫描传感器通常只有一行感光单元(少数彩色线阵使用三行感光单元的传感器) 2.线阵相机每次只采集一行图像; 3.线阵相机每次只输出一行图像; 4.与传统的面阵相机相比,面阵扫…
unity--相机跟随与屏幕自适应的实现
文章目录相机跟随与屏幕自适应的实现相机跟随屏幕自适应相机跟随与屏幕自适应的实现
相机跟随
如何让相机跟着人物跑呢?这是个不太大但是需要解决的问题。
思路就是用LateUpade(保证在所有更新函数都调用完调用)实时监测相机的位置&#x…

使用D435i相机录制TUM格式的数据集
目录前言系统版本一、使用realsense SDK录制bag包的情况1.录制视频2.、提取rgb和depth图片1.2.3.对齐时间戳二、用realsense-ros打开相机录制bag包1.将深度图对齐到RGB2.使用realsense-ros打开相机3.录制rosbag1.直接使用命令2.写一个launch文件4.提取图像以及对齐时间戳前言
…
QT之QCamera
文章目录 前言开启摄像机并显示照相总结前言
提示:这里可以添加本文要记录的大概内容:
QCamera是Qt提供的一个模块,用于实现Windows,MacOS和Linux平台上的多媒体应用程序。它提供了一个高级的界面和易于使用的API,旨在使开发人员可以快速有效地构建各种应用程序。
QCam…
SNK施努卡 - 工业视觉定位检测 工业视觉检测原理
工业视觉检测的原理是通过传感检测器检测到物体已靠近工业相机系统的视场中心,并向图像采集部分发送触发脉冲。对图像进行处理、分析和识别,得到测量结果或逻辑控制值。最后,对结果进行处理,以控制流水线的动作,执行定…

多线技术:TDI时间延迟积分
多线技术:TDI时间延迟积分
在比较暗的环境下拍照,清晰成像的条件,是CMOS芯片获取足够的光。而获得足够光的方法有:
方案1.增加单位时间的光照强度(光源、大镜头收集光)
方案2.增加CMOS感光时长…
ESP32通过 WiFi 传输视频
概述
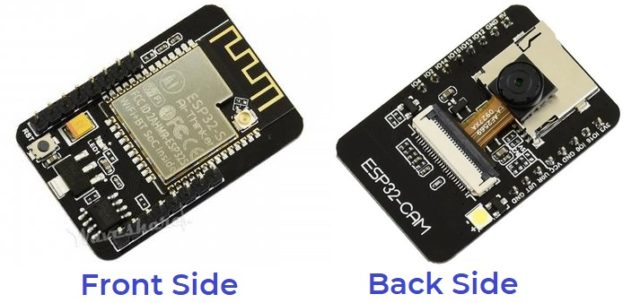
这是ESP32 WiFi视频流的入门教程。ESP32-CAM 是一款带有ESP32-S 芯片的小型摄像头模块,除了OV2640 相机和多个用于连接外围设备的 GPIO 外,它还具有一个microSD 卡插槽,可用于存储相机拍摄的图像。
ESP32-CAM 简介
ESP32-CAM 是一款采用ESP32-S 芯片的超小型相机模组…

最值得入手的好物有哪些,推荐几款实用的数码好物
随着科技的进步,越来越多的数码产品不断的出现在我们的生活中,这其中也不乏一些实用的数码产品,让我们可以享受更舒适的生活,提高我们的工作效率。下面就给大家分享几款我最近使用过的一些数码产品,它们不仅功能强大而…
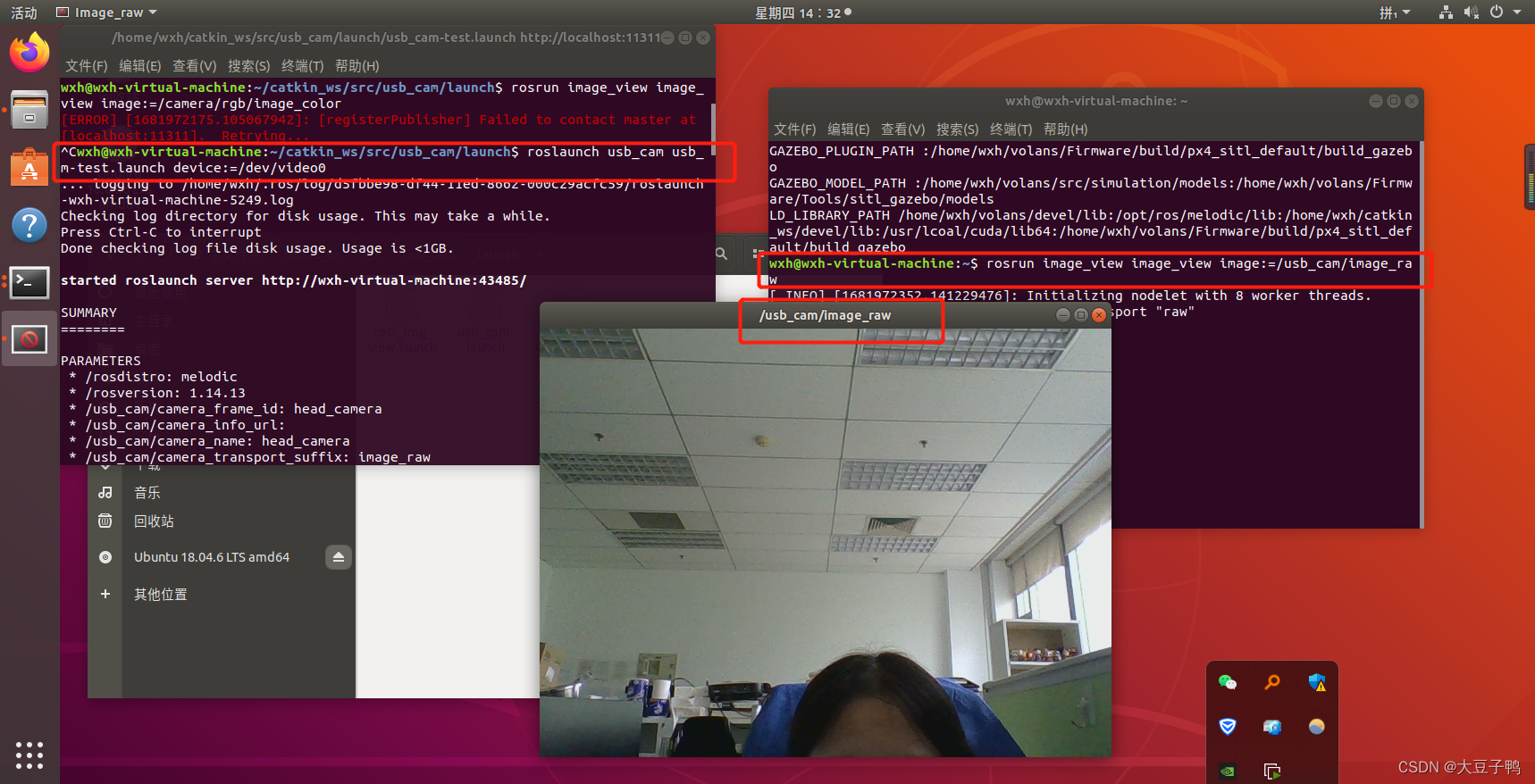
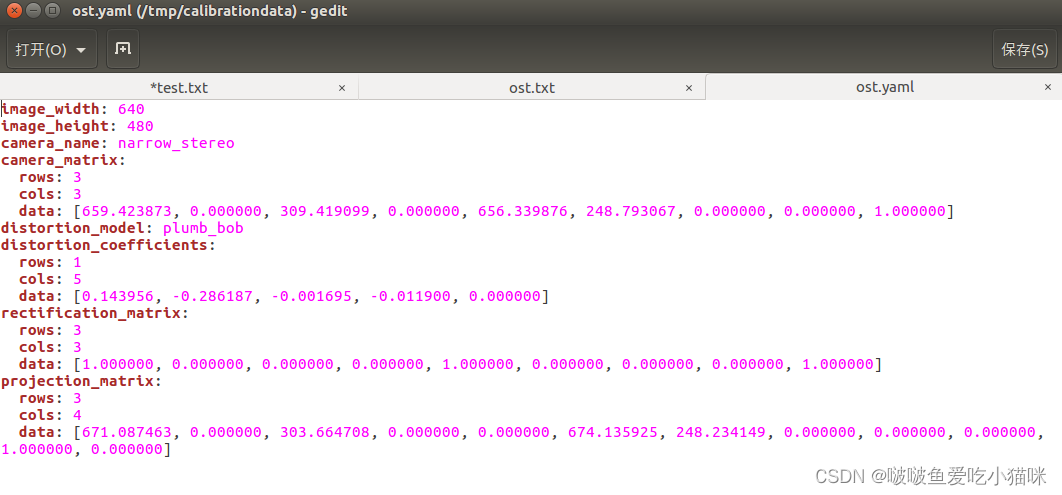
usb_cam相机标定实践 ROS
文章目录运行环境:1.1 usb_cam连接:1.2 ROS包下载1.3 准备棋盘格1.4 启动相机1.4 开始标定2.1 保存标定结果2.2 移动yaml文件2.3 在launch中添加标定文件1) 添加标定文件路径2.4 报错解决1)修改 yaml 文件相机名称2)安装v4l-utils依赖tip:标定…
Baumer工业相机堡盟工业相机如何通过BGAPISDK里工具函数来计算工业相机的实时帧率(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK里工具函数来计算工业相机的实时帧率(C)Baumer工业相机Baumer工业相机的帧率的技术背景Baumer工业相机的帧率计算方式在BufferEvent声明显示FrameID设计显示帧率的函数Baumer工业相机通过BGAPI SDK计算帧率的…
Camera.ScreenToWorldPoint方法介绍
Camera.ScreenToWorldPoint方法介绍
Camera.ScreenToWorldPoint是Unity中的一个方法,用于将屏幕坐标系中的点转换为世界坐标系中的点。这个方法通常用于将鼠标点击的位置(屏幕坐标系)转换为游戏世界中的位置(世界坐标系ÿ…

什么是美颜sdk?美颜sdk基础知识、应用场景、关键技术详解
为了满足用户高端的拍摄需求,美颜技术应运而生。而现在,美颜技术已经不再是简单的滤镜、美白、磨皮等简单的操作,而是通过美颜sdk实现更加高端的美颜效果。本文将详细介绍美颜sdk的基础知识、应用场景以及关键技术。 一、美颜sdk基础知识 1、…
Android 图片编码之必备技能
在进行 Android 开发时,不可避免地会接触到许多图片格式,例如 JPEG、PNG 等。就以 JPEG 格式为例,它是一种有损压缩模式,使用 YCbCr 的颜色空间来保存色彩信息。当需要在屏幕上显示图片时,会将 JPEG 数据解码成 RGB 进…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取每张图像的微秒时间和FrameID(C++)
BGAPI SDK获取图像微秒级时间和FrameID Baumer工业相机Baumer工业相机FrameID技术背景一、FrameID是什么?二、使用BGAPI SDK获取图像微秒时间和FrameID步骤 1.获取SDK图像微秒级时间2.获取SDK图像FrameIDBaumer工业相机使用微秒级时间和FrameID保存的用处Baumer工业…

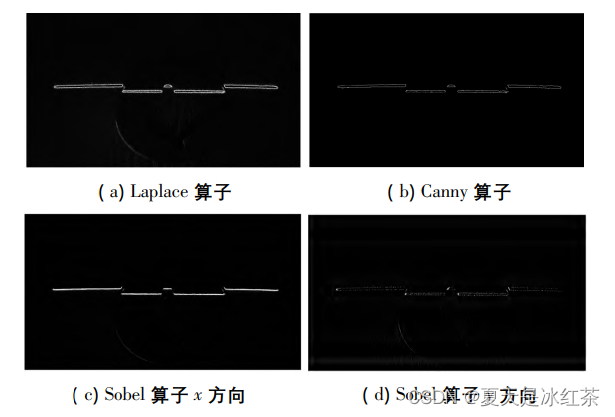
Baumer工业相机堡盟工业相机如何联合BGAPISDK和OpenCVSharp实现图像的拉普拉斯算法增强(C#)
Baumer工业相机堡盟工业相机如何联合BGAPISDK和OpenCVSharp实现图像的拉普拉斯算法增强(C#)Baumer工业相机Baumer工业相机使用图像算法增加图像的技术背景Baumer工业相机通过BGAPI SDK联合OpenCV使用图像增强算法1.引用合适的类文件2.BGAPI SDK在图像回调…
Baumer工业相机堡盟工业相机如何使用BGAPISDK将图像数据转换为ImageSource图像(C#)
Baumer工业相机堡盟工业相机如何使用BGAPISDK将图像数据转换为ImageSource(C#) Baumer工业相机Baumer工业相机图像数据转为ImageSource的技术背景Baumer工业相机使用BGAPISDK将图像数据转换为ImageSource方式1.引用合适的类文件2.将BGAPISDK原始图像数据…
基于神经辐射场NeRF的SLAM方法
随着2020年NeRF[1]的横空出世,神经辐射场方法(Neural Radiance Fields)如雨后春笋般铺天盖地卷来。NeRF最初用来进行图像渲染,即给定相机视角,渲染出该视角下的图像。NeRF是建立在已有相机位姿的情况下,但在…
五金件装备不良、视觉检测零件是否缺失硬件方案
【检测目的】 检测不良品 【检测要求】 检测速度:13S一个
【拍摄效果图一】(正面) 【拍摄效果图二】正面 【拍摄效果图三】正面 【拍摄效果图四】(正面) 【拍摄效果图五】(正面) 【拍摄效果图…

Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置自动亮度调整BrightnessAuto(自动曝光自动增益)(C++)
自动亮度调整项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外࿰…
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的线性灰度变换ScaleImage算法增强(C#)
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的线性灰度变换算法增强(C#) Baumer工业相机Baumer工业相机使用图像算法增加图像的技术背景Baumer工业相机通过BGAPI SDK联合Halcon使用线性灰度变换增强算法1.引用合适的类文件2.BGAPI SDK在…
Baumer工业相机堡盟工业相机如何使用BGAPISDK联合Halcon将图像中的六一快乐字体提取出来(C#)
Baumer工业相机堡盟工业相机如何使用BGAPISDK联合Halcon将图像中的六一快乐字体提取出来(C#) Baumer工业相机Baumer工业相机使用Halcon图像算法的技术背景Baumer工业相机通过BGAPI SDK联合Halcon使用图像算法1.引用合适的类文件2.BGAPISDK在图像回调中引…
【赏】three.js如何确定3dtile格式的模型的中心点和缩放比例
three.js如何确定3dtile格式的模型的中心点和缩放比例。 有多个3dtile格式的模型(tileset.json + b3dm),请问如何确定合适的比例?即在three.js中如何确定像机的位置和缩放比例? 在three.js中确定3D模型的中心点和缩放比例通常需要以下步骤: 加载3D模型。使用three.js的加载…
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用BGAPI2.Buffer转BGAPI2.Image功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用BGAPI2.Buffer转BGAPI2.Image功能(C) Baumer工业相机Baumer工业相机BGAPISDK和图像转换的技术背景Baumer工业相机BGAPI2.Buffer转BGAPI2.Image功能1.引用合适的类文件2.通过BGAPISDK将BGAPI2.Buffer转BGA…
(1分钟了解)视觉惯性导航初始化方法综述
视觉惯性导航初始化方法综述
编辑切换为居中
添加图片注释,不超过 140 字(可选)
初始化相关的简介,在这里知道初始化方法可以分为联合初始化、非联合初始化和半联合初始化三种方法即可。
编辑切换为居中
添加图片注释&…

硬件设计 之摄像头分类(IR摄像头、mono摄像头、RGB摄像头、RGB-D摄像头、鱼眼摄像头)
总结一下在机器人上常用的几种摄像头,最近在组装机器人时,傻傻分不清摄像头的种类。由于本人知识有限,以下资料都是在网上搜索而来,按照摄像头的分类整理一下,供大家参考:
1.IR摄像头:
IRinfr…

unity 接收拼接数据进行纹理替换且保存相机纹理到rtsp server(一)
1 rtsp 协议后编码解码
rtsp协议的问题就是,拼接完成后,还需要编码,而unity里面再需要解码,需要的过程多了一步编码再解码,大大加重了
2 rtsp 协议后轻量编码
rtsp协议使用mjpeg进行图片传输。why?这样做…
点云从入门到精通技术详解100篇-从全局到局部的三维点云细节差异分析
目录 前言 国内外研究现状 细节差异分析相关研究 三维点云的相似性相关研究 存在的问题 三维点云对比的相关技术 2.1 三维点云的采集设备 2.2三维点云的存储格式 2.3三维点云的空间变换 2.4三维点云相似度分析 2.4.1点云特征的提取 2.4.2特征相似度计算 本文篇幅较长࿰…
巴斯勒相机基于SDK 二次开发C++程序
巴斯勒相机在VS中如何进行连接调用呢(软触发调用) 1.查找巴斯勒相机网口; 2.调用巴斯勒相机提供的接口,连接巴斯勒相机; 3.初始化相机; (安装巴斯勒相机软件)
#pragma once
#includ…
Baumer工业相机堡盟相机如何实现ForceIP功能(C#)
项目场景:
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外࿰…

OpenCV实战(24)——相机姿态估计
OpenCV实战(24)——相机姿态估计 0. 前言1. 相机姿态估计2. 3D 可视化模块 cv::Viz3. 完整代码小结系列链接 0. 前言
校准相机后,就可以将捕获的图像与物理世界联系起来。如果物体的 3D 结构是已知的,那么就可以预测物体如何投影…
工业相机的帧率和曝光(快门)之间的关系
项目场景
工业相机是常用与工业视觉领域的常用专业视觉核心部件,拥有多种属性,是机器视觉系统中的核心部件,具有不可替代的重要功能。
工业相机已经被广泛应用于工业生产线在线检测、智能交通,机器视觉,科研,军事科学,航天航空等众多领域
…
最新干货|面向无人机的自主导航与避障
分享嘉宾 | 鲁鹏文稿整理 | William1、无人机在自主导航方面的挑战无人机在未知环境上导航,面临着很多挑战,由于未知环境下,并不知道当前环境的地图可能会存在一些威胁,主要原因在于没有先验知识。这里主要有两个方面去解决或处理…
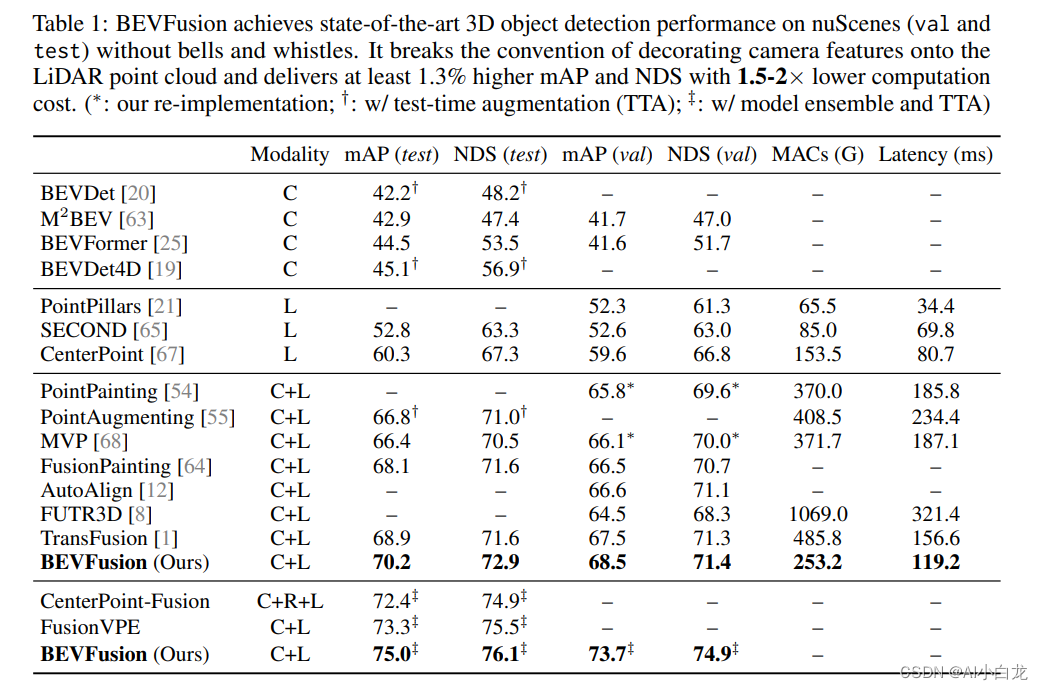
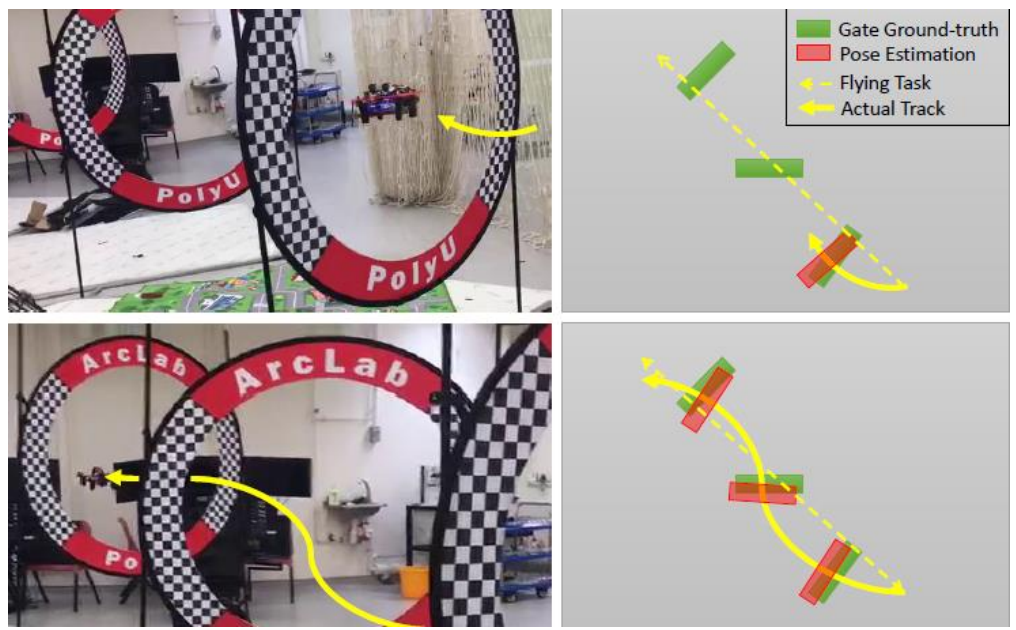
【融合感知】激光雷达和相机融合感知-BEVFusion
BEVFusion有两篇文章,这里在一起分析下不同,分别是:
【1】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework.
【2】BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation
先说结论&…

热红外相机图片与可见光图片配准教程
一、前言图像配准是一种图像处理技术,用于将多个场景对齐到单个集成图像中。在这篇文章中,我将讨论如何在可见光及其相应的热图像上应用图像配准。在继续该过程之前,让我们看看什么是热图像及其属性。二、热红外数据介绍热图像本质上通常是灰…
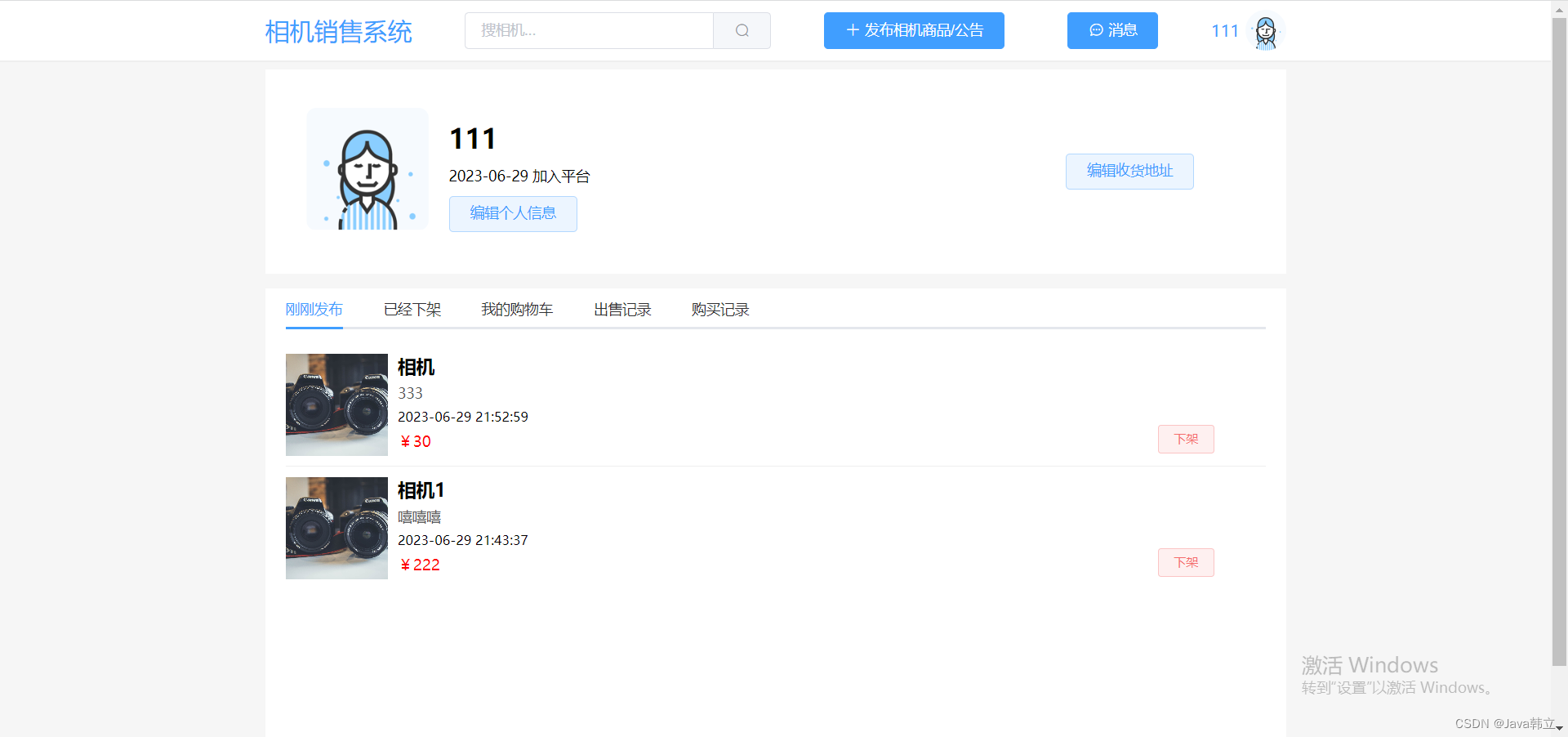
基于SpringBoot+vue前后端分离的相机销售系统
文章目录 项目介绍主要功能截图:首页相机详情个人中心 部分代码展示设计总结项目获取方式 🍅 作者主页:Java韩立 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你…

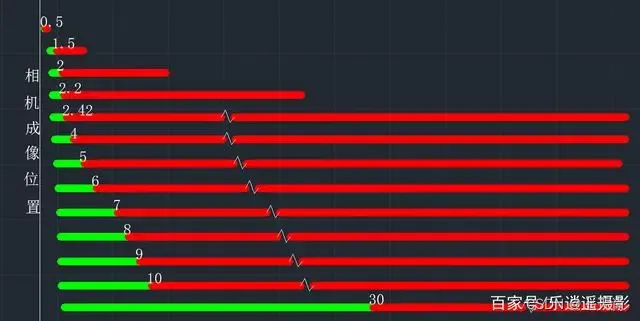
使用不同尺寸的传感器拍照时,怎么保证拍出同样视场范围的照片?
1、问题背景
使用竞品机做图像效果对比时,我们通常都会要求拍摄的照片要视场范围一致,这样才具有可比性。之前我会考虑用同样焦距、同样分辨率的设备去拍照对比就可以了,觉得相机的视场范围只由镜头焦距来决定。
但如果对于不同尺寸的传感器…
](https://img-blog.csdnimg.cn/34f25434e13641d3a138f929d859c0fc.png)
【图像融合】差异的高斯:一种简单有效的通用图像融合方法[用于融合红外和可见光图像、多焦点图像、多模态医学图像和多曝光图像](Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
three.js中的点对象(Point)和点材质(PointsMaterial)
一、点对象和点材质基本介绍
1. 点材质(PointsMaterial):
点材质用于渲染点对象,它决定了点的颜色、透明度等属性。
常用属性有:
color: 点的颜色,默认为白色。opacity: 点的透明度,默认为1…

android使用相机 intent.resolveActivity returns null
问题
笔者使用java进行android开发,启动相机时 intent.resolveActivity returns null
takePictureIntent.resolveActivity(getPackageManager()) null详细问题
笔者使用如下代码启动相机
// 启动相机SuppressLint("LongLogTag")private void dispatc…

Gocator 3D线扫相机专业名称解释说明
文章目录3D相机标定用物品规范GOCATOR 2880Gocator 电源/LAN连接器Gocator I/O连接器网络设置净距离,视场和测量范围分辨率和精度坐标系定义校准控制界面介绍相机最大编码器触发速率官方说明文档下载地址:https://download.csdn.net/download/qq_30150579/87590508 …
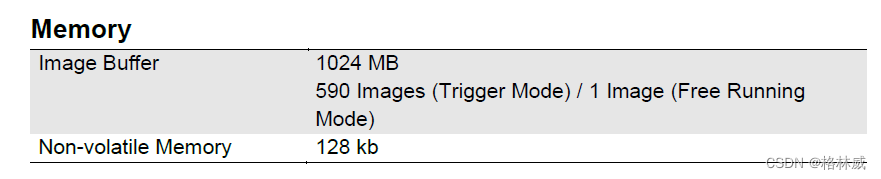
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像写入相机内存(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像写入相机内存(C) Baumer工业相机Baumer工业相机BGAPISDK和相机内存的技术背景Baumer工业相机通过BGAPISDK将相机图像写入相机内存功能1.引用合适的类文件2.通过BGAPISDK将相机图像写入相机内存功能…
RealSense深度相机在Ubuntu18.04的ros环境下,保存同一时刻下深度图像和彩色图像
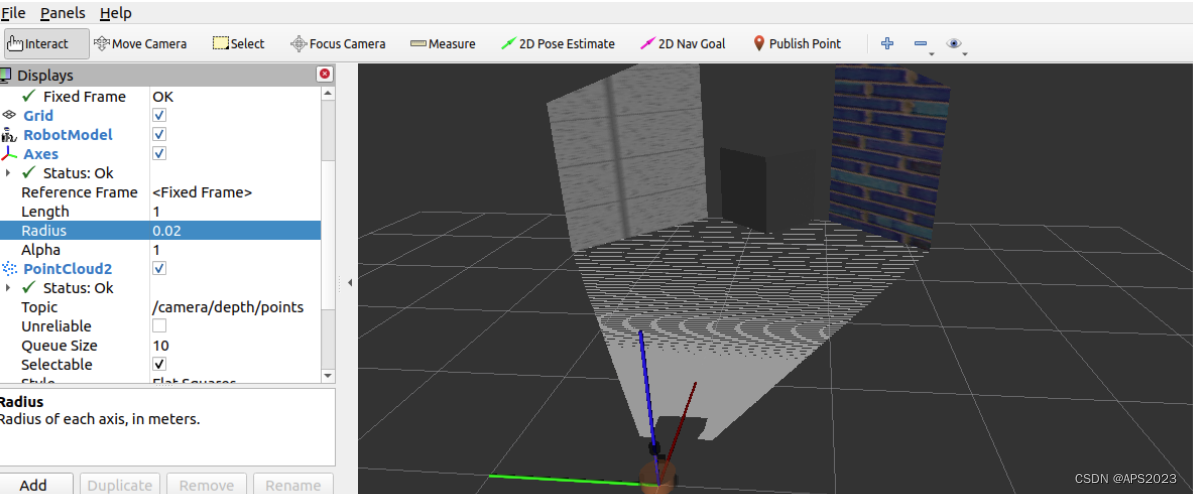
背景:Ubuntu18.04 ROS Melodic 已安装配置好RealSense相关程序,链接D435i相机后,得到如下Rostopic:
/camera/color/image_raw # 彩色图像信息
/camera/depth/image_rect_raw # 深度图像信息
于是写一个python程序&am…

DIY相机(一)libcamera库
相机选型
DIY相机首先是要确定使用的相机型号。兼容树莓派,画质好一些的,目前主要有两款:一是Raspberry Pi Camera Module 3,二是Raspberry Pi HQ Camera。
下图是Raspberry Pi Camera Module 3的相关特性。支持自动对焦和HDR等…
相机FOV是什么英文单词的缩写,是什么意思。
问题描述:相机FOV是什么英文单词的缩写,是什么意思。
问题解答:
FOV 是 "Field of View" 的缩写,翻译成中文是视场角或视野。在相机领域,相机的 FOV 表示相机能够捕捉到的场景范围的大小,通常用…

LDR6020 USB PD3.1的 3组6通道CC控制SOC芯片介绍和运用
随着USB-IF 协会发布了全新的USB PD3.1规范,该规范将快充功率上限从100 W提升至240 W,充电功率的提升也让USB PD的应用领域更加广泛。
USB PD在手机、笔记本电脑,扩展到便携式设备、物联网设备、智能家居、通信和安防设备、汽车和医疗等领域…
如何降低海康、大华等网络摄像头调用的高延迟问题(一):海康威视网络摄像头的python sdk使用(opencv读取sdk流)
目录
1.python sdk使用
1.海康SDK下载 2.opencv读取sdk流 先说效果,我是用的AI推理的实时流,延迟从高达7秒降到小于1秒
如果觉得这个延迟还不能接受,下一章,给大家介绍点上不得台面的小方法 SDK(Software Developme…
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用AutoFocusHelper自动对焦补充功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用AutoFocusHelper自动对焦补充功能(C) Baumer工业相机Baumer工业相机BGAPISDK和AutoFocus功能的技术背景Baumer工业相机通过BGAPISDK使用AutoFocus功能1.引用合适的类文件2.通过BGAPISDK声明AutoFocusHelp…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取偏振相机4个角度的图像转换和显示(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取偏振相机4个角度的图像转换和显示(C#) Baumer工业相机Baumer工业相机偏振相机的技术背景代码案例分享1:引用合适的类文件2:回调函数里通过BGAPI SDK获取偏振相机四个偏振角度的图…

央视推荐的护眼灯是哪款?分享央视曝光护眼灯品牌
l 现在的学生深夜学习成为常态,所以近视人数就会猛增,许多人认为是电子产品是使用过多而导致的。l 专业眼科医生表示:视力下降不应该全让电子产品背锅,很多家长忽略了一点,孩子在学习时的光线不对(过亮或过…
深度相机如何标定?(代码开源)
文章:Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras 作者:Filippo Basso, Emanuele Menegatti, and Alberto Pretto. 编译:点云PCL 代码: https://github.com/iaslab-unipd/rgbd_calibration 欢迎各位加入知识星球…
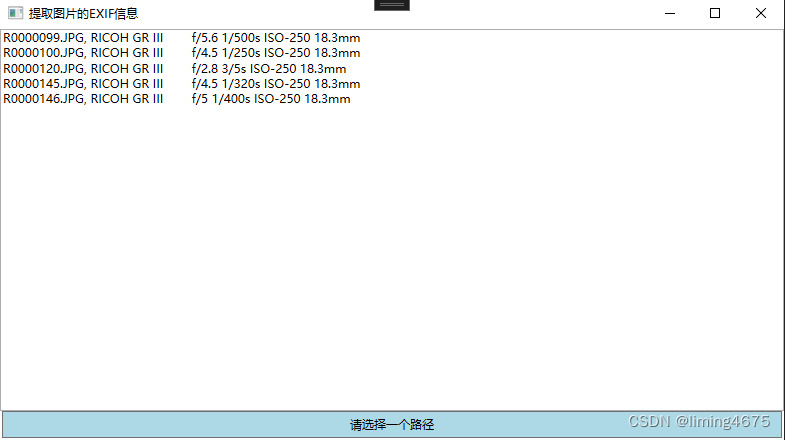
c#使用ExifLib库提取图像的相机型号、光圈、快门、iso、曝光时间、焦距信息等EXIF信息
近期公司组织了书画摄影比赛,本人作为摄影爱好者,平时也会拍些照片,这次比赛当然不能错过。为了提高获奖概率,选了19张图像作为参赛作品。但是,摄影作品要提交图像的光圈、曝光时间等参数。一两张还可以通过电脑自带软…
QT获取USB相机具体属性信息
代码获取
#include <QCameraInfo>foreach (const QCameraInfo& cameraInfo, cameras)
{QString device_name cameraInfo.deviceName();qDebug() << "Device Name: " << device_name;qDebug() << "Description: " << …
计算摄像技术01 - 摄像技术基础知识
一些计算摄像技术知识内容的整理:传统摄像技术中的快门和曝光、图像信号格式。 目录
一、传统摄像技术中的快门和曝光
(1)快门速度
(2)光圈
(3)景深
(4)曝光
二、图…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用UserSet功能保存和载入相机的各类参数(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用UserSet功能保存和载入相机的各类参数(C) Baumer工业相机Baumer工业相机NEOAPISDK中UserSet的技术背景代码案例分享第一步:保存相机当前参数设置UserSet_Save第二步:载入已经保存…
Baumer工业相机堡盟工业相机如何通过BGAPISDK显示Bayer彩色格式的图像(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK显示Bayer彩色格式的图像(C#)Baumer工业相机Baumer工业相机的Bayer彩色图像的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示Bayer彩色图像Baumer工业相机在BufferEvent显示Bayer彩色图像Baumer工业相…

抓拍摄像机开关量控制4K高清手机远程看图建筑生长定时缩时相机
作为物联网数据采集解决方案专业提供商,数采物联网小编daq-iot 在这里做以下内容介绍,并诚挚的欢迎大家讨论和交流。
项目案例参考视频:
https://www.bilibili.com/video/BV1Kp4y1T7wQ/?spm_id_from333.999.0.0
4K高清太阳能供电定时拍照相机,通过光…
一步一步详细介绍如何使用 OpenCV 制作低成本立体相机
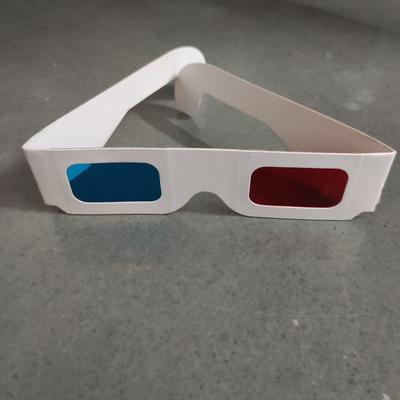
在这篇文章中,我们将学习如何创建定制的低成本立体相机(使用一对网络摄像头)并使用 OpenCV 捕获 3D 视频。我们提供 Python 和 C++ 代码。文末并附完整的免费代码下载链接 我们都喜欢观看上面所示的 3D 电影和视频。您需要如图 1 所示的红青色 3D 眼镜才能体验 3D 效果。它是…
记一次gstreamer解码存图绿线问题排查
背景
业务需求需要将某些解码后的视频帧保存为图片,大部分情况下图片都是正常的,更换了某些视频流后,在保存的图片顶部就会出现一条绿线,现记录下解决过程。
部分代码如下
解码回调如下,完整代码可参考之前的文章G…
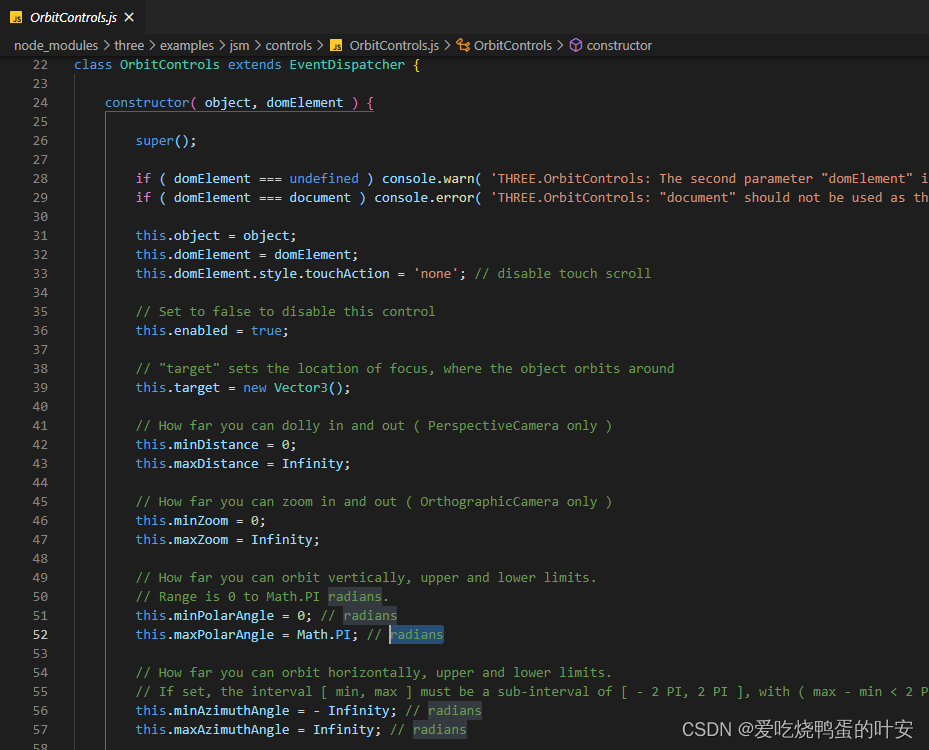
threejs 相机OrbitControls常用方法及属性
相机控件OrbitControls
通过OrbitControls可以对三维场景进行缩放、平移、旋转,本质上改变的不是场景,而是相机的参数,相机的位置角度不同,同一个场景的渲染效果是不一样,比如相机围绕着一个场景旋转,就像…

使用QIS(Quantum Image Sensor)图像重建总结(1)
最近看了不少使用QIS重建图像的文章,觉得比较完整详细的还是Abhiram Gnanasambandam的博士论文:https://hammer.purdue.edu/articles/thesis/Computer_vision_at_low_light/20057081
1 介绍
讲述了又墨子的小孔成像原理,到交卷相机…

索尼RSV文件怎么恢复为MP4视频
索尼相机RSV是什么文件?
如果您的相机是索尼SONY A7S3,A7M4,FX3,FX3,FX6,或FX9等,有时录像会产生一个RSV文件,而没有MP4视频文件。RSV其实是MP4的前期文件,经我对RSV文件…

【新品发布】洛微科技全新工业级高性能 D系列 TOF相机D3重磅上线!
近日,洛微科技对外发布新款高性能D系列 TOF相机D3,这是一款专为工业环境中高性能操作设计的3D TOF智能相机。
D3基于行业领先的Sony DepthSense像素技术开发,具有毫米级测量精度、VGA深度分辨率、抗环境光能力强、软/硬件多触发方式、HDR适配…
使用 Android (API 21+) 和 iOS (SDK 8.0+) 在移动设备上同步相机帧与惯性测量单元 (IMU) 数据的高效技术手册
1. 引言
随着移动设备硬件的持续发展和日益增强的处理能力,它们已经变得足够强大,可以支持高质量的传感器数据获取和处理。相机和惯性测量单元 (IMU) 是移动设备上两个最常用的传感器。相机用于捕获环境图像,而 IMU 主要用于感知设备的物理运…
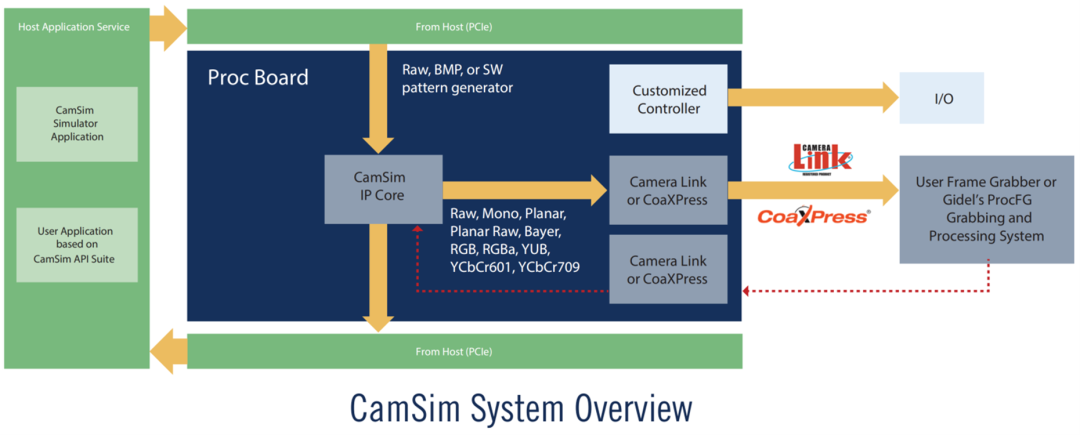
CamSim相机模拟器:极大加速图像处理开发与验证过程
随着图像处理技术的不断发展,相机模拟在图像处理开发和验证中扮演着越来越重要的角色。相机模拟能够模拟真实相机的成像过程,提供高质量的图像输入,使开发人员能够更好地评估和调整图像处理算法。本文将探讨如何通过相机模拟来加速图像处理的…

0基础学习VR全景平台篇第140篇:摄影器材保养与维护
上课!全体起立~ 大家好,欢迎观看蛙色官方系列全景摄影课程! 摄影器材属于精密仪器,在使用过程中会磨损、老化、积灰。如果不对摄影器材进行清洁和保养,油污、灰尘、水渍长期停留在设备上,不仅会大大缩短相机…

ECCV 2022|面向精确的主动相机定位算法
标题:ECCV 2022,山东大学、北大、腾讯AILab、斯坦福和三维家联合提出,面向精确的主动相机定位算法项目地址:https://github.com/qhFang/AccurateACL.文章:Towards Accurate Active Camera Localization(ECCV 2022&…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK将相机图像数据用二进制的方式保存到本地(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK将相机图像数据用二进制的方式保存到本地(C)Baumer工业相机Baumer工业相机将图像保存为二进制图像的技术背景代码分析第一步:先转换Byte*图像为二进制图像第二步:在回调函数里进行Buf…
JS调用Android原生相机设置
1、定义 private ValueCallback<Uri> mUploadMessage;public ValueCallback<Uri[]> uploadMessage;private Uri imageUri;
2、webview 设置 webView.setWebChromeClient(new WebChromeClient(){// For 3.0 Devices (Start)// onActivityResult attached before co…

直播美颜技术的演进及其应用:直播美颜SDK详解
直播美颜技术的应用,为直播开辟了新的业态,从最初简单的美颜滤镜,到现在的直播美颜SDK,其技术演进历程也是一步步走来。
一、直播美颜技术的演进
1、简单美颜滤镜
最初的直播美颜技术,就是通过简单的美颜滤镜来实现…
基于可微分渲染器的相机位置优化【PyTorch3D】
在这个教程中,我们将使用可微渲染学习给定参考图像的相机的 [x, y, z] 位置。
我们将首先使用相机的起始位置初始化渲染器。 然后,我们将使用它来生成图像,使用参考图像计算损失,最后通过整个管道进行反向传播以更新相机的位置。…
10-微信小程序 图片 相机 二维码 动画相关API(实现选择相册、拍照、录像、动画)
10-微信小程序 图片 相机 二维码 动画相关API(实现选择相册、拍照、录像、动画) 文章目录 10.1选择图片wx.chooseImage(Object object)object.success 回调函数代码效果 10.2 预览图片wx.previewImage(Object object)代码效果 10.3 相机APICameraContext wx.createCameraContex…
海康机器视觉工业相机客户端MVS-常用功能CCM
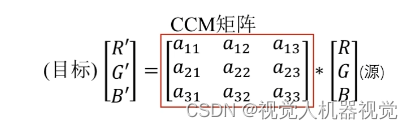
什么是CCM?
CCM是一种功能。 CCM矩阵是通过对每一个RGB分量乘以一个校正矩阵来实现色彩校正。当图像经过白平衡处理后,图像整 体会显得比较黯淡,同时多种颜色可能存在不同程度地偏离其标准值。此时需要对图像的色彩乘以校正 矩阵来修正各颜色至其标准值,使图像的整体色彩更…
Baumer工业相机堡盟工业相机如何使用BGAPISDK的相机图像时间戳计算运行时间以及时间差(C++)
Baumer工业相机堡盟工业相机如何使用BGAPISDK的相机图像时间戳计算运行时间以及时间差(C) Baumer工业相机Baumer工业相机BGAPI SDK和图像时间戳的技术背景Baumer工业相机使用BGAPISDK控制相机数据流的方式1.引用合适的类文件2.使用BGAPISDK获取时间戳的方…
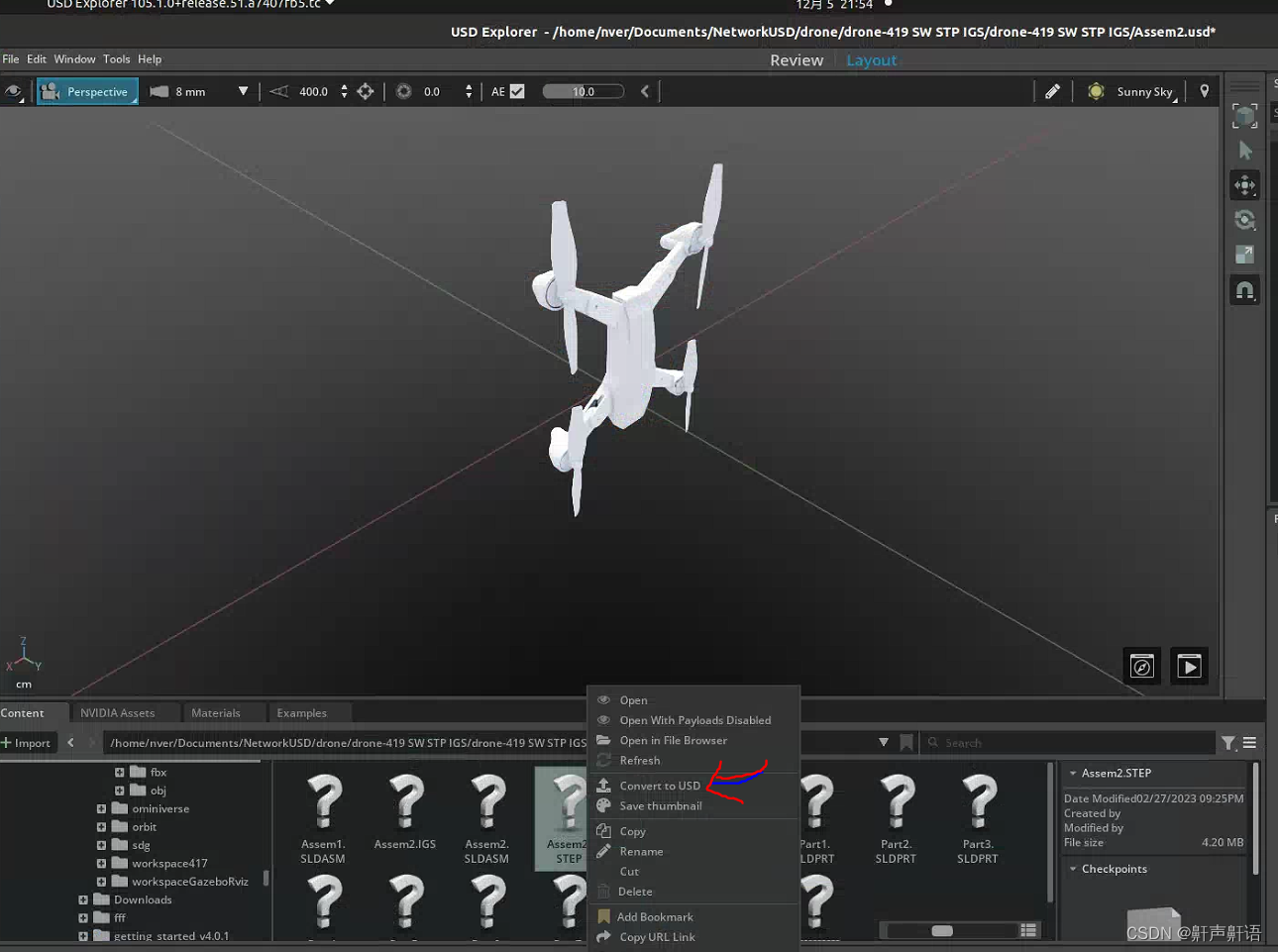
玩转Omniverse | 将FBX文件导入Omniverse View,以及step等3D格式如何转换为USD文件的过程
1,参考这个过程,玩转Omniverse | 将FBX文件导入Omniverse View 2,实际操作: 在omniverse中安装usd explorer 打开usd explorer 选择step,然后右键选择convert to USD,点击确认,稍等一会就会转换…

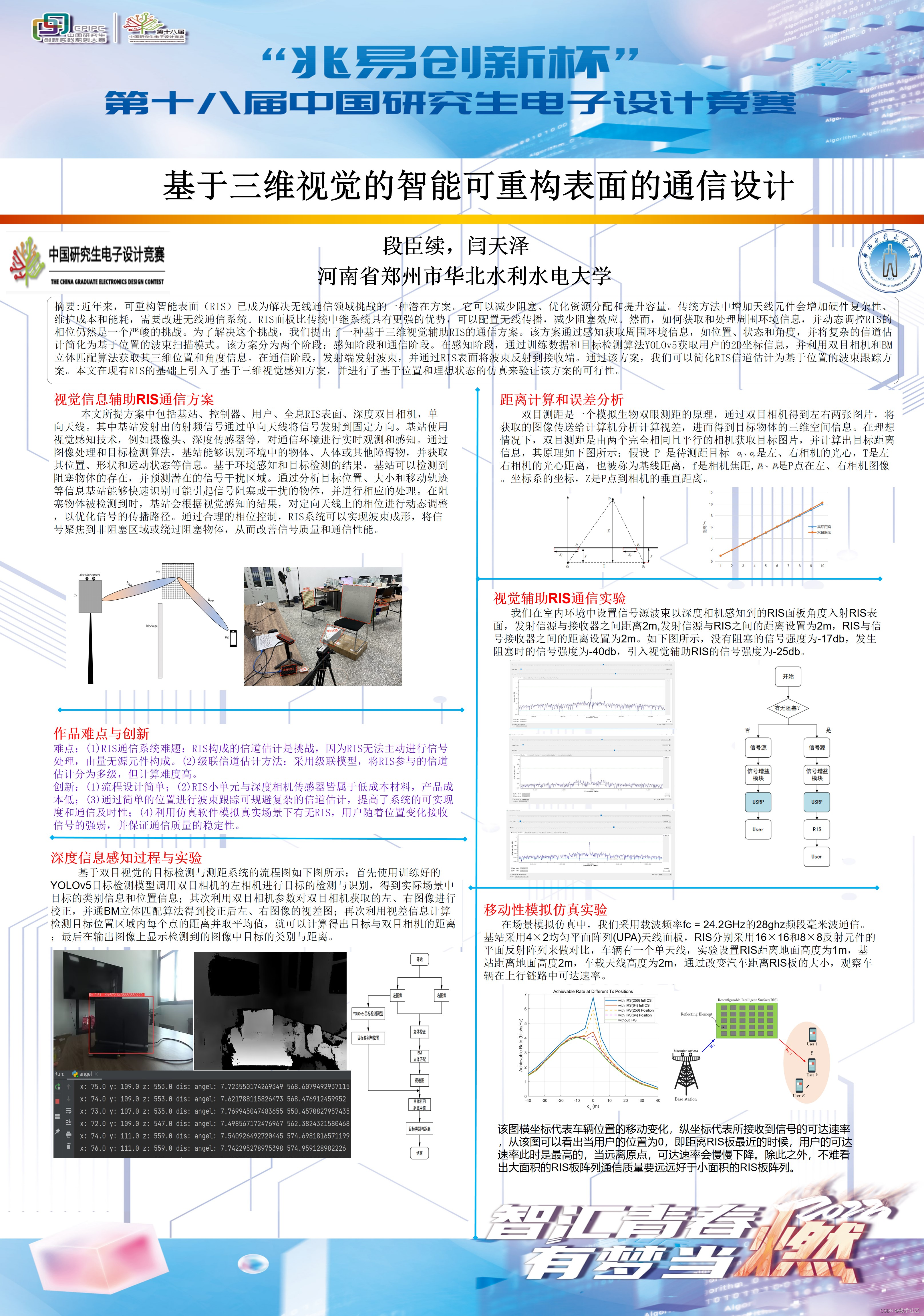
【2023研电赛】商业计划书命题:基于三维视觉感知的可重构智能表面通信设计
该作品参与极术社区组织的2023研电赛作品征集活动,欢迎同学们投稿,获取作品传播推广,并有丰富礼品哦~ 基于三维视觉感知的可重构智能表面通信设计 参赛单位:华北水利水电大学 参赛队伍:创新小组 指导老师:邵…

机器视觉陶瓷板智能检测设备在工业质检中的应用
随着工业自动化的不断发展,机器视觉技术在质量控制领域中的应用越来越广泛。在陶瓷制品生产中,机器视觉技术可以帮助企业实现陶瓷板的智能检测,减少人工操作的错误率,提高生产效率和产品质量。本文将介绍机器视觉陶瓷板智能检测设…
相机图像质量研究(3)图像质量测试介绍
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
线扫相机DALSA--采集卡Base模式设置
采集卡默认加载“1 X Full Camera Link”固件,Base模式首先要将固件更新为“2 X Base Camera Link”。 右键SCI图标,选择“打开文件所在的位置”,找到并打开SciDalsaConfig的Demo,如上图所示: 左键单击“获取相机”&a…

0基础学习VR全景平台篇第129篇:认识单反相机和鱼眼镜头
上课!全体起立~
大家好,欢迎观看蛙色官方系列全景摄影课程!
一、相机
单反和微单
这里说的相机是指可更换镜头的单反/微单数码相机。那两者有何差异呢?
1)取景结构差异
两者最直观的区别在于,微单相机…
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明一
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明一 Baumer工业相机Baumer工业相机图像采集功能Baumer工业相机图像基本参数设置 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、…
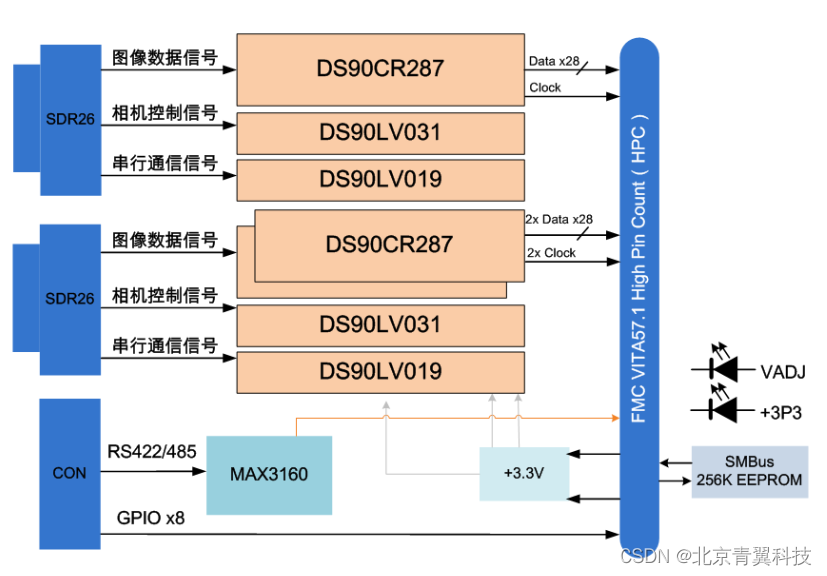
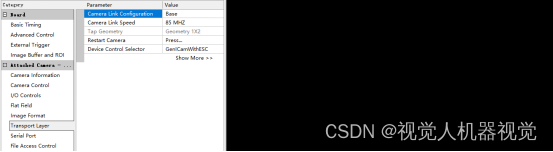
【FMC200】基于FMC标准的1路CameraLink Full 输出子卡模块
产品概述 FMC200是一款CameraLink发送FMC子卡模块,该模块支持2路CameraLink Base模式或者1路CameraLink Full模式的图像信号输出。板卡具有2个CameraLink端口(SDR26),可以作为模拟相机的输出。 技术指标
图像接口性能:…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用UserSet功能保存和载入相机的各类参数(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用UserSet功能保存和载入相机的各类参数(C#) Baumer工业相机Baumer工业相机NEOAPISDK中UserSet的技术背景代码案例分享第一步:保存相机当前参数设置UserSet_Save第二步:载入已经保…
YOLOv5+单目测量物体尺寸(python)
YOLOv5+单目测量尺寸(python) 1. 相关配置2. 测距原理3. 相机标定3.1:标定方法1(针对图片)3.2:标定方法2(针对视频)4. 相机测距4.1 测距添加4.2 细节修改(可忽略)4.3 主代码5. 实验效果相关链接 1. YOLOV5 + 单目测距(python) 2. YOLOV7 + 单目测距(python)
本篇…
Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C++)(RGB)
Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C)(RGB) Baumer工业相机Baumer工业相机图像数据转为Bitmap的技术背景Baumer工业相机使用BGAPISDK将图像数据转换为Bitmap的几种方式1.引用合适的类文件…

怎样找回删除的照片?4个方法快速找回!
案例:怎样找回删除的照片?
“朋友们,昨天去旅游拍了好多照片,导入电脑后今天在整理的时候想把一些拍的不好的删掉,但是我一不小心把所有的照片都删掉了,这可怎么办呀?我应该怎么恢复电脑删除的…
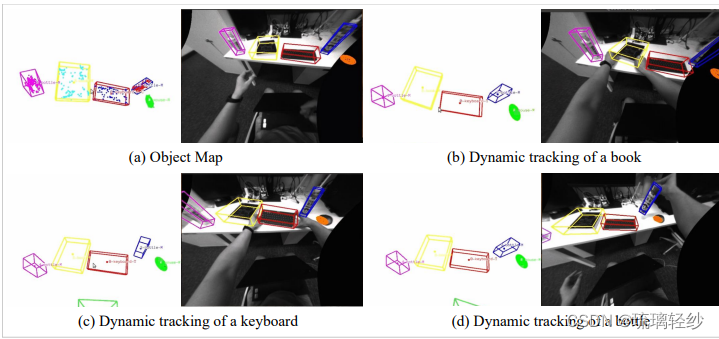
论文于祥读及复现——《Multi-level Map Construction for Dynamic Scenes》
论文祥读之——动态场景的多层次地图构建 0. 出发点(暨摘要)1. 引言2. 相关工作3.主要内容概括3.1 几何地图的构建3.1.1 密集点云地图和八叉图的构建3.1.2 平面地图的构建 3.2 对象地图的构建3.2.1 对象参数化和数据关联3.2.2 对象的更新与优化 4. 实验4…
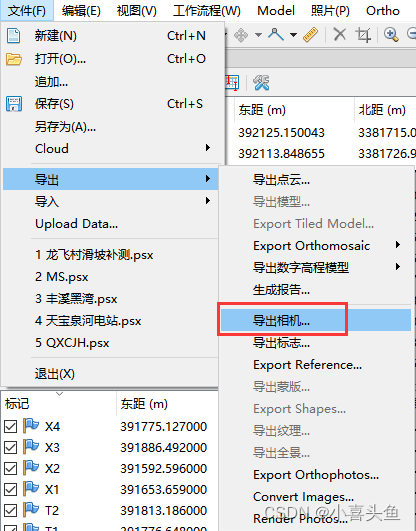
Agisoft Metashape 空三导入Photomod
Agisoft Metashape 空三导入Photomod 文章目录 Agisoft Metashape 空三导入Photomod前言一、Metashape空三成果导出1.1导出PAT-B空三格式1.2. 导出相机文件二、Photomod空三成果导入2.1导入PAT-B空三格式2.2导入相机文件前言
本文讲解将Agisoft Metashape的空三成果导入Photom…
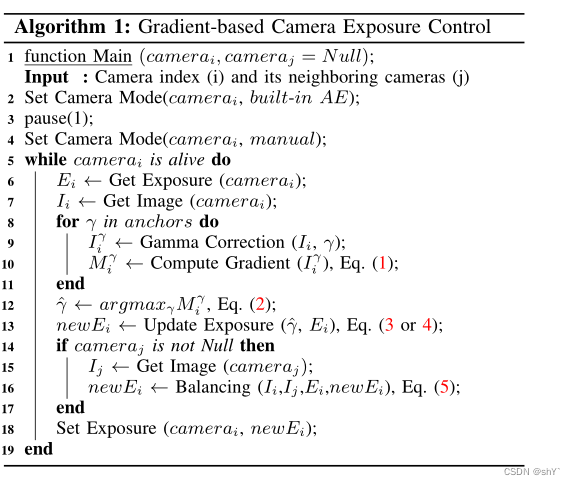
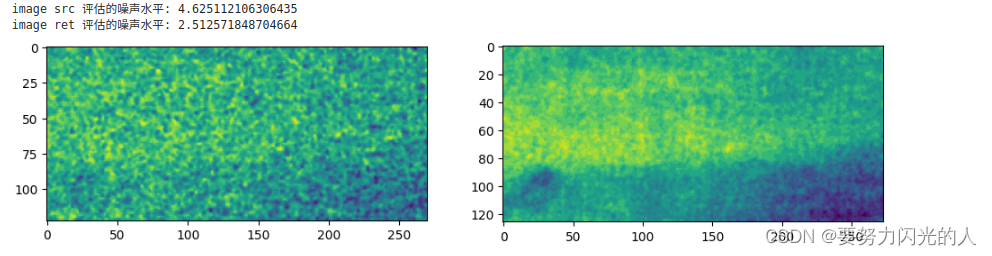
论文阅读《Gradient-based Camera Exposure Control for Outdoor Mobile Platforms》
摘要
本文介绍了一种用于移动机器人平台上图像处理和计算机视觉应用的自动调节相机曝光的新方法。由于大多数图像处理算法严重依赖于主要基于局部梯度信息的低级图像特征,因此我们认为梯度量可以确定适当的曝光水平,从而使相机能够以对照明条件具有鲁棒…
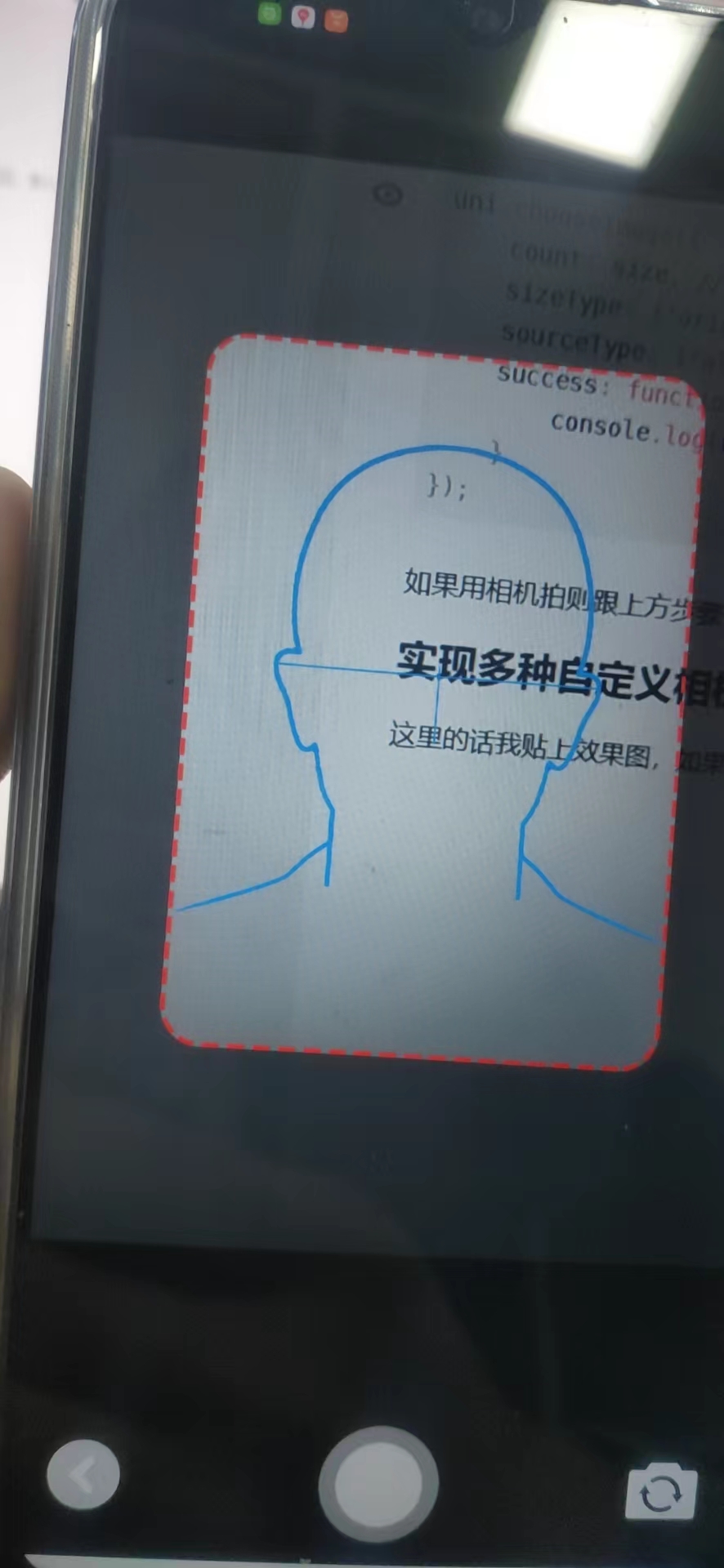
uniapp实现自定义相机
自定义相机起因由于最近用uniapp调用原生相机容易出现闪退问题,找了很多教程又是压缩图片又是优化代码,我表示并没有太大作用!!实现自定义相机使用效果图拓展实现多种自定义相机水印相机身份证相机人像相机起因 由于最近用uniapp调用原生相机容易出现闪退…
Baumer工业相机堡盟相机如何使用JPEG图像压缩功能(LXT.JP系列相机图像压缩功能的使用和优点以及行业应用)(C++)
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…

Halcon常用算子解释笔记
**
Halcon常用算子解释笔记
**
一、机器视觉所包含的部分
学科:数学、图像、软件、光学 1 光源 (照明系统) 2 镜头 (光学成像) 3 相机 (光电捕捉) 4 软件 (图像处理与决策模块) 采集、预处理、分割、识别及显示 5、控制系统
二、blob分析——案例5 ( bal l.hdev) (★★★…
面向移动机器人的道路环境感知
分享嘉宾 | 范睿
文稿整理 | William 自动驾驶感知 首先,三维几何模型背后的机理是多视图几何学,多视图几何学是指想要得到对应模型的三维几何架构,则必须要用相机在两个不同的位置进行拍照。如图1,可以通过利用两个相机在不同位…
lidar camera calibration
1 Automatic Extrinsic Calibration Method for LiDAR and Camera Sensor Setups 2022
vel2cam git
2 A Novel Method for LiDARCamera Calibration by PlaneFitting
本文介绍了一种使用带ArUco标记的立方体的3D-3D对应特征来校准LiDAR和相机的新方法。在LiDAR坐标系中&…
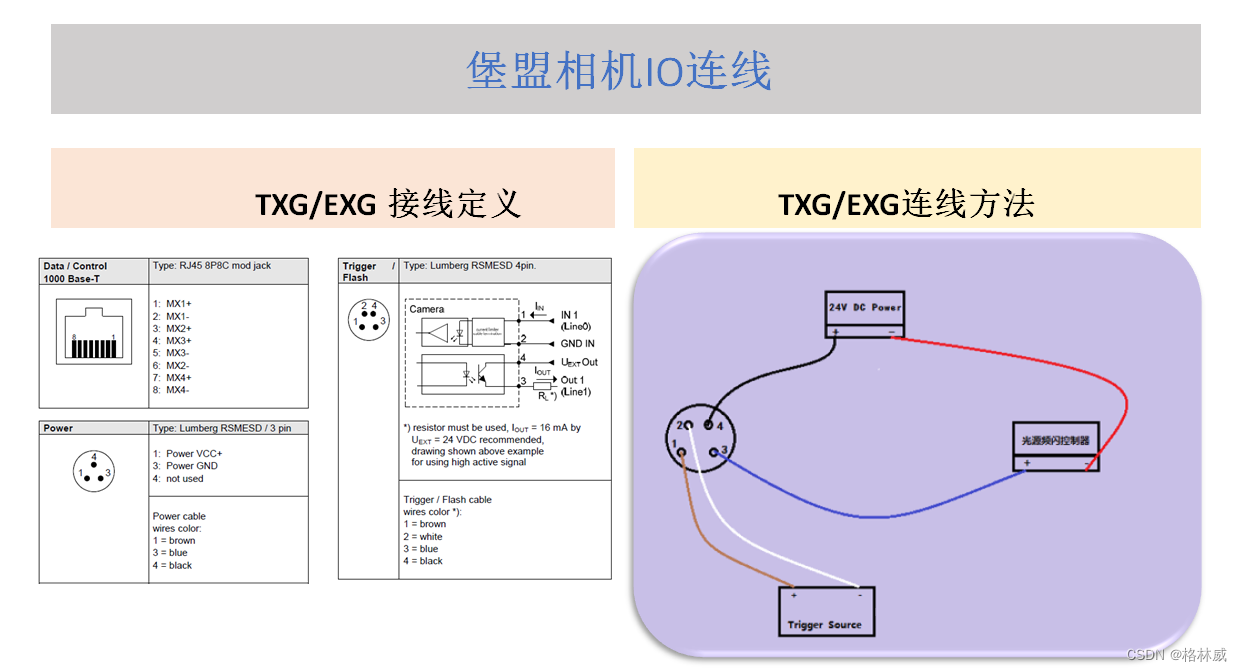
Baumer工业相机堡盟工业相机IO介绍与配置(二)
Baumer工业相机堡盟工业相机IO介绍与配置(二) Baumer工业相机Baumer工业相机IO的功能Baumer工业相机IO的作用Baumer工业相机IO上点连线方法 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景&#…
Baumer工业相机堡盟工业相机使用BGAPISDK将工业相机设为Burst模式以及该模式的优势以及行业应用(C++)
Baumer工业相机堡盟工业相机使用BGAPISDK将工业相机设为Burst模式以及该模式的优势以及行业应用(C) Baumer工业相机Baumer工业相机的Burst模式的技术背景Baumer工业相机使用BGAPISDK将设置Burst模式1.引用合适的类文件2.使用BGAPI SDK初始化相机设置Burs…
机器视觉工程师们,再择业-换水还是换游泳池
机器视觉康耐视智能相机Insight-边缘胶路缺陷检测 再择业-换水还是换游泳池。 择业,大多数人是从高中开始选择专业,大学毕业就开始纠结选择自己的专业,再次慎重起来的时候,大多数人选择自己所学的专业,也就是我们所说,毕业就找到了一个“门当户对”的工作,无论是否本…
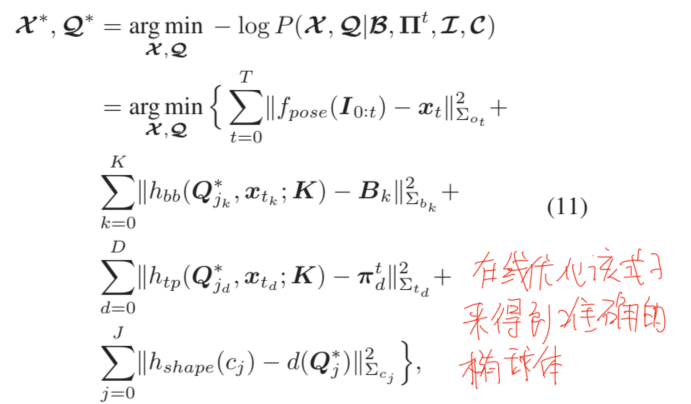
【论文阅读】Robust Object-based SLAM for High-speed Autonomous Navigation
一、问题概述
这篇文章是在QuadricSLAM的基础上进行的改进,也就是说依然使用了椭球对物体进行描述,论文中提到使用椭球本身是因为椭球其参数化表示可以完全通过相机的检测框来进行约束,二次曲面与对偶二次曲面可以参考链接,文章使…

《NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis》论文精读
Abstract
我们提出了一种方法,通过使用稀疏的输入视图集优化底层连续体场景函数,实现了合成复杂场景新视图的最先进结果。我们的算法使用全连接(非卷积)深度网络表示场景,其输入是单个连续的5D坐标(空间位置(x, y, z)和观看方向(θÿ…

MidJourney如何画出专业摄影师拍出的照片效果,附提示词
文 / 高扬(微信公众号:量子论) 最近沉迷于MidJourney作画,与ChatGPT相比,研究AI绘画,可以扩大自己的想像空间。 孩子的想像力更为丰富,如果家有宝宝,可以把孩子们的想法用AI绘画呈现…
Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C#)(RGB)
[TOC](Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C#)(RGB))
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图…
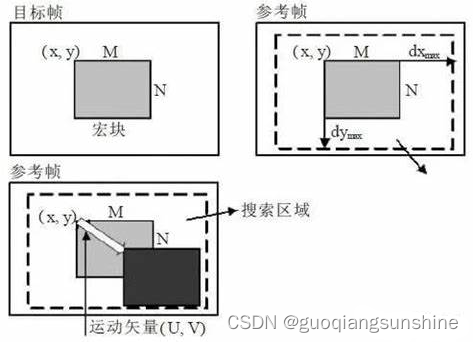
【数据关联】基于Patch的对应特征关联,关联当前帧->参考帧,帧间追踪
帧间追踪与数据关联 1. WarpPixelWise(求当前帧特征点位置)1.1 函数功能1.2 函数输入输出1.3 算法步骤 2. GetWarpMatrixAffine(计算 当前帧->参考帧 仿射变换矩阵)2.1 函数功能2.2 函数输入输出2.3 算法步骤 3. GetWarpMatrixAffine(计算 当前帧->参考帧 仿射变换矩阵)3…

SLAM之反求运动和地图点(对极几何)
简介 前面的文章介绍了如何在已知空间点的情况下在不同坐标系中的表示(刚体的坐标变换),以及如何将空间中的点投影到相机中生成图像,但是现实中的情况却是相反的情况(空间点以及坐标系之间的变换未知)&…
Vue 移动端调用相机和相册实现图片上传
一、基础知识:
1.只调用手机相册
<input type"file" accept"image/*;" >2.只调用手机相机拍照
<input type"file" accept"image/*" capture"camera">3.调用手机相册和拍照
<input type"…
Baumer工业相机堡盟工业相机通过BGAPISDK使用图像回调函数全帧率保存图像(C++)
Baumer工业相机堡盟工业相机通过BGAPISDK使用图像回调函数全帧率保存图像(C) Baumer工业相机Baumer工业相机全帧率保存的技术背景Baumer工业相机通过BGAPISDK使用相机图像回调函数1.引用合适的类文件2.通过BGAPISDK在相机图像回调函数全帧率保存 Baumer工…
Camera Link 接口
Camera Link是一个标准的接口协议,用于高速的图像数据传输,常被用在工业相机和图像处理系统之间。这个标准由自动视觉协会(Automated Imaging Association,简称AIA)在2000年发布,旨在实现各种厂家之间的高性…
Android相机-HAL-Rockchip-hal3
引言:
对于Android相机的 HAL层而言对上实现一套Framework的API接口,对下通过V4L2框架实现与kernel的交互。不同的平台会有不同的实现方案。主要是对Android HAL3的接口的实现。看看rockchip是怎么支持hal3的?
代码目录:
hardw…
unity控制摄像机跟随玩家三种办法
第一种方法 将相机拖到人物的游戏对象上,也就是让相机成为角色的子物体,这样相机就会跟随角色移动 但是这样会存在问题 1.相机会随着人物的翻转而翻转 2.相机跟随人物没有缓冲效果,移动比较僵硬 第二种办法 代码方式控制相机跟随人物移动,利用Lerp函数控制相机 1.在Unity中…
Baumer工业相机堡盟工业相机如何通过BGAPISDK显示彩色相机和黑白相机的图像(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK里显示彩色相机和黑白相机的图像(C#)Baumer工业相机Baumer工业相机的彩色和黑白成像的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示图像彩色工业相机在BufferEvent显示图像黑白工业相机在BufferEven…
太阳能电池板AI视觉检测:不良品全程阻断,高效助力光伏扩产
2022年,面对复杂严峻的国内外形势,我国光伏行业依然实现高速增长,多晶硅、硅片、电池片、组件产量稳居全球首位。2023年以来,扩产项目已多点开花。光伏装机量天花板将不断提升,分布式电站占比也将逐年上升。中国光伏行…

固定翼无人机1:500地籍
引言 上几期,睿铂为大家推送了两篇相对精度验证的文章,其优秀的成果引来了业界人士不少的赞叹。同时,许多客户朋友又提出了更高的要求。目前,在地籍精度的项目中,使用多旋翼无人机挂载倾斜摄影相机作业,是能…

深眸科技探索AI机器视觉技术,助力密封圈缺陷识别检出率达99.8%
密封圈作为一种具有良好性能的密封材料,在工业领域具有极其广泛的应用,在汽车、船舶、管道、家用电器等多行业都能看见它的身影,广阔的市场需求促就密封圈产业的蓬勃发展。
密封圈属于大批量生产,在生产过程中难免会出现瑕疵品&a…
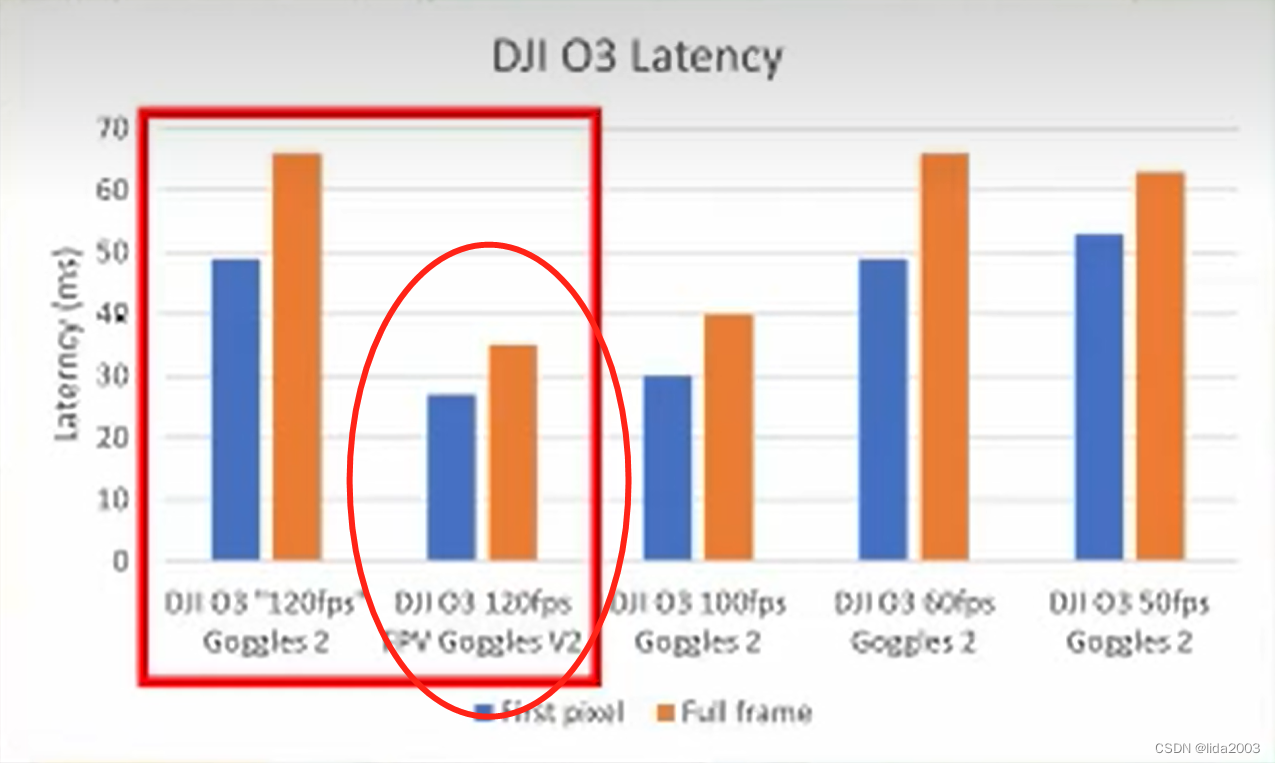
关于FPV图传系统时延讨论
关于FPV图传系统时延讨论 1. 源由2. 时延测试方法3. 时延测试资料4. 关于模拟图传5. 关于FPV时延感受5.1 静态时延5.2 动态时延 6. 参考资料7. 附录 DJI 图传系统 1. 源由
视频图传系统最重要的几个指标:
分辨率视角帧率时延传输距离
目前高清图传主要规则&#…
Inpaint Anything (AI替换)
1、介绍
Inpaint Anything 是一个结合了 SAM、图像修补模型(例如 LaMa)和 AIGC 模型(例如 Stable Diffusion)等视觉基础模型的AI图像替换,修补系统。
基于此系统,用户可以方便的使用IA进行图像替换&#…
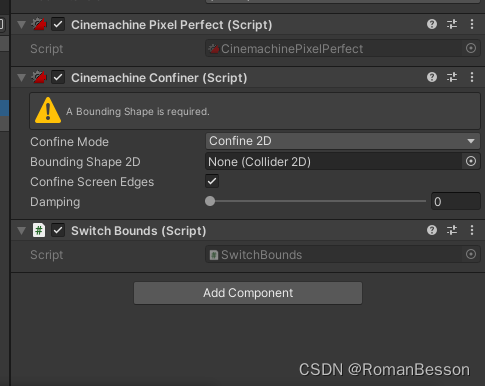
Unity--使用Cinemachine Confiner设置摄像机边界
使用Cinemachine Confiner设置摄像机边界
前提提要:在做这个功能前需要: main camera 另外一个相机
思路:创建一个对象绑定Polygon Collider2D 边界。然后在另外一个相机Cinemachine Confiner上绑定他 绑定边界
记得点这个&#…
ThreeJS教程:地图案例(包围盒、正投影)
推荐:将 NSDT场景编辑器 加入你的3D工具链 3D工具集: NSDT简石数字孪生 地图案例(包围盒、正投影)
地图案例(包围盒、正投影)
地图案例会涉及到几何体、包围盒、正投影相机三方面知识点。
平面填充几何体ShapeGeometry包围盒Box3正投影相机Orthograph…

Jetson Nano一步到位打开USB摄像头(Rosmaster小车)
背景:我用的rosmaster r2小车配的摄像头是Astra pro,也就是下图这款: 1. 支持的摄像头
Jetson开发包有多个用于连接相机的接口,包括USB、以太网和MIPI CSI-2。流行的相机是现成的支持,而Jetson生态系统合作伙伴支持广…

colmap多相机重建多场景及数据库数据快速修改方法
1 colmap流程
1.1 新建项目 首先打开colmap,然后创建新的project,其中数据库目录和名称自己选定,注意不要将它放到图像目录下即可。然后images选择的是图像目录(比如我这里是guangxi/section1),这个目录下…

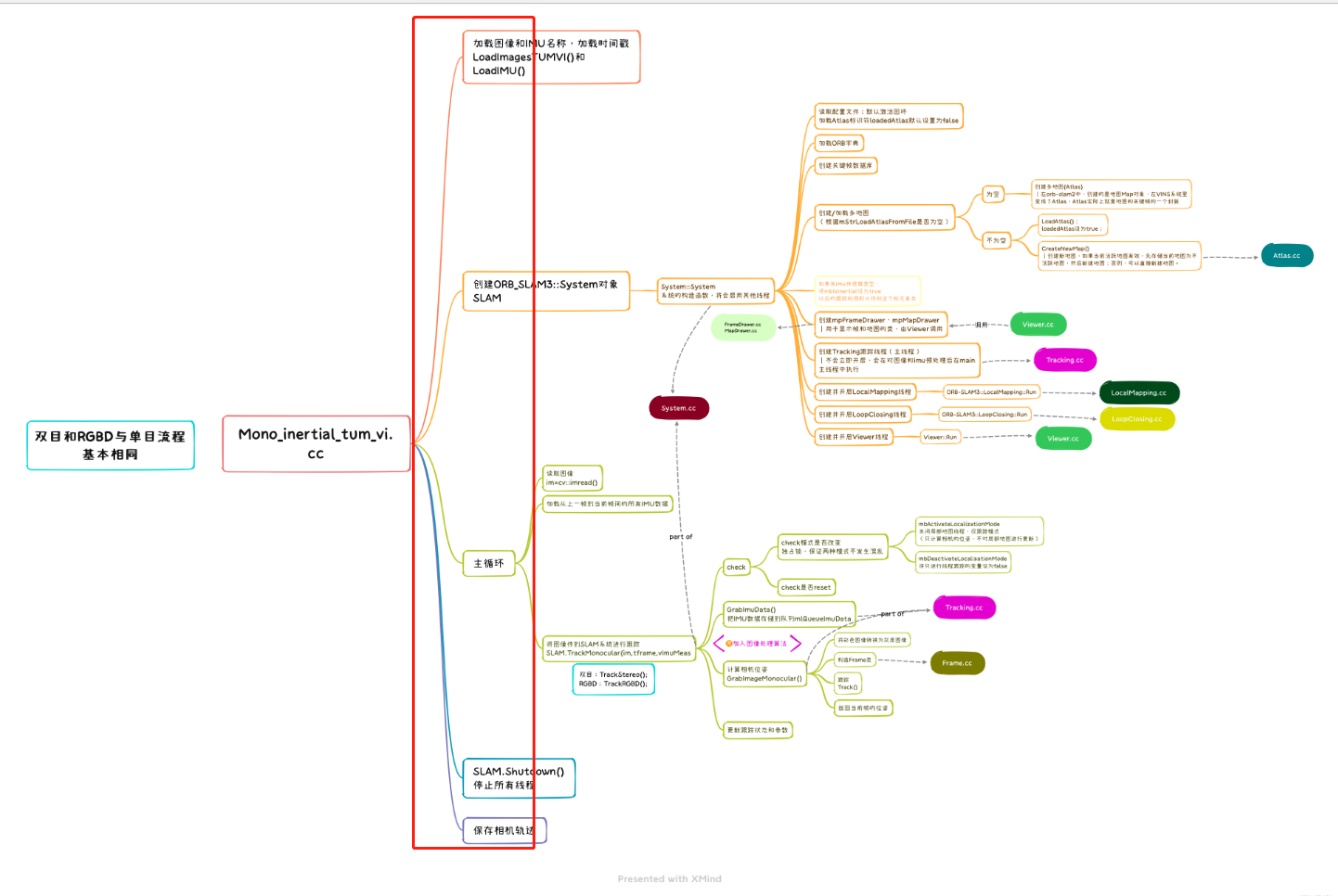
1.ORB-SLAM3系统概述
1.内容简介
本系列文章主要基于ORB-SLAM3代码、论文以及相关博客,对算法原理进行总结和梳理。
ORB-SLAM系列整体架构是不变的,都包含Tracking、LocalMapping和LoopClosing三个核心线程,中间伴随着优化过程。在ORB-SLAM3算法中比较突出的改进…
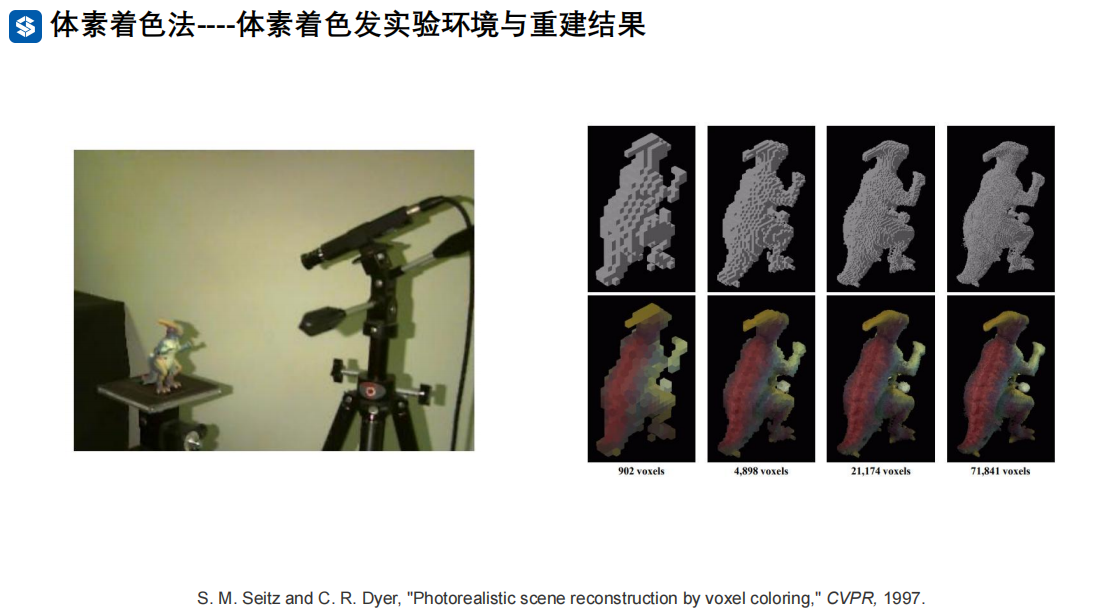
三维重建_体素重建_空间雕刻法/体素着色法
目录
1. 三角化和体素重建的区别
2. 空间雕刻法 空间雕刻法的一致性定义 空间雕刻法具体实现 基于八叉树的空间雕刻法具体实现编辑 空间雕刻法效果展示 3. 体素着色法 体素着色法的缺点:不唯一性编辑
体素着色法不唯一性解决措施编辑 体素着色发实验环境与…
关于机器人状态估计(15)-VIO与VSLAM精度答疑、融合前端、主流深度相机说明与近期工程汇总
VIOBOT种子用户有了一定的数量,日常大家也会进行交流,整理总结一下近期的交流与答疑。
VIO-SLAM(作为三维SLAM,相对于Lidar-SLAM和LIO-SLAM)在工程上落地的长期障碍,不仅在算法精度本身,还有相对严重的鲁棒性问题&…
lidar-camera 标定系统
摘要
本文讨论了一个视觉系统的校准问题,该系统由RGB相机和3D光学雷达(LiDAR)传感器组成。将来自不同模态的两个独立点云进行配准始终是具有挑战性的。我们提出了一种新颖、准确的校准方法,使用已知尺寸的简单纸板箱。我们的方法…
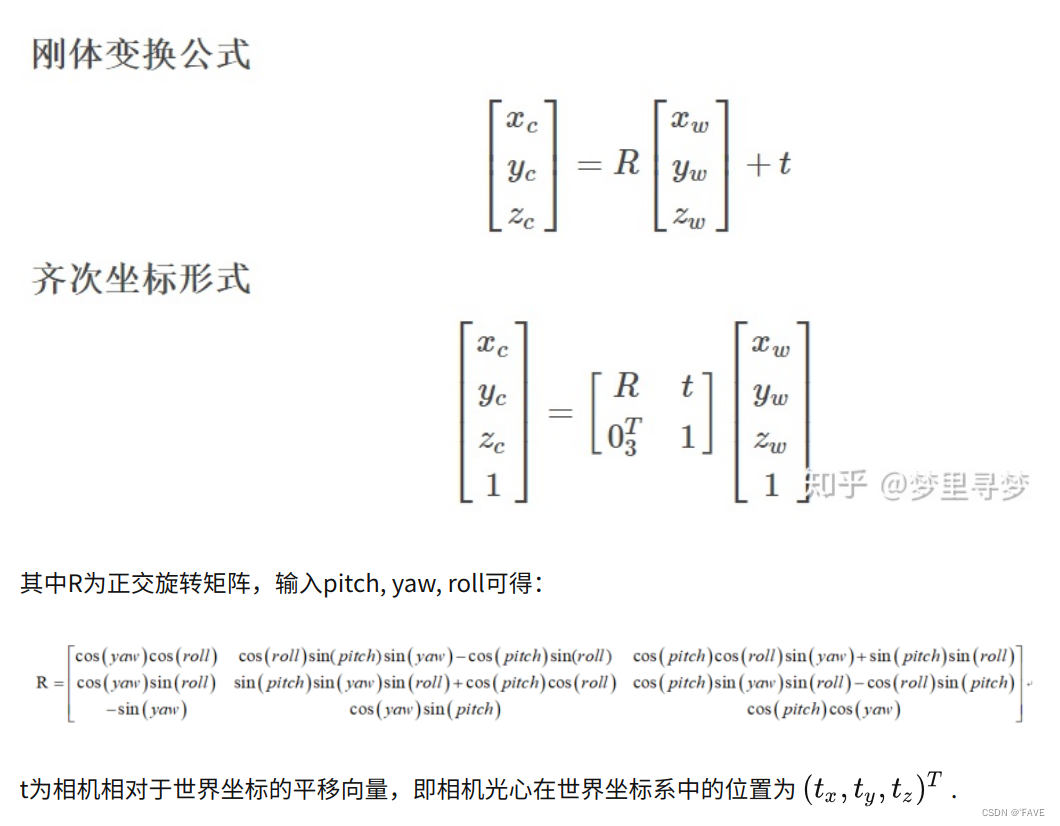
相机坐标系之间的转换
一、坐标系之间的转换
一个有4个坐标系:图像坐标系、像素坐标系、相机坐标系、世界坐标系。
1.图像坐标系和像素坐标系之间的转换
图像坐标系和像素坐标系在同一个平面,利用平面坐标系之间的转换关系可以之知道两个坐标系变换的公式,并且该…
摄像头镜头的常见参数
摄像头镜头的常见参数有以下几个: 焦距(Focal Length):指镜头光学系统中的主轴长度,一般使用毫米(mm)作为单位表示。焦距越长,则摄像头的视野范围会变窄,拍摄的物体大小视…
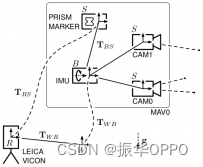
视觉SLAM数据集(二):EuRoC DataSet
本文展示了在微型飞行器(MAV)上收集的视觉惯性数据集。数据集包含立体图像、同步 IMU 测量以及精确的运动和结构地面实况。 这些数据集发表于:M. Burri,J. Nikolic,P. Gohl,T. Schneider,J. Reh…
Android 使用Camera2 API 和 GLSurfaceView实现相机预览
GLSurfaceView 和 SurfaceView 是 Android 中用于显示图像的两个视图类,它们在实现方式和使用场景上有一些区别。
实现方式:GLSurfaceView 基于 OpenGL ES 技术实现,可以通过 OpenGL ES 渲染图像。而 SurfaceView 则是通过基于线程的绘制方式…
关于激光探测器光斑质心算法在FPGA硬件的设计
目录 0引言
1CCD采集图像质心算法
2基于FPGA的图像质心算法
3仿真结果与分析
4结论 0引言
在一些姿态检测的实际应用中,需要在被测对象上安装激光探测器[1],利用CCD相机捕捉激光光斑来检测观测对象的实际情况,光斑图像质心坐标的提取是图…

十一、OpenGL的坐标系统
第一部分概念
OpenGL 坐标系统:OpenGL 坐标系中每个顶点的 x,y,z 坐标都应该在 -1.0 到 1.0 之间,超出这个坐标范围的顶点都将不可见。将一个物体(图像)渲染到屏幕上,通常经过将物体坐标转换为…
为什么3ds max渲染效果图有噪点?点进来,CG Magic告诉您!
大家在使用3ds max渲染效果图时,可能渲染结果往往会出现的都是不真实,有小伙伴会问如何使3dmax渲染效果图真实呢?
不真实就算了,渲染过程中,会出现3Dmax渲染噪点多这类问题。
什么原因3ds max渲染效果图有噪点呢&a…

【立体视觉(三)】之张正友标定法原理
【立体视觉(三)】之张正友标定法原理 一、相机标定二、参数求解一)闭合解二)极大似然解三)考虑相机畸变 三、实验流程 此为个人学习笔记,在各处借鉴了不少好图好文(参考文献在文末)&…

深入理解相机服务层 CameraService
和你一起终身学习,这里是程序员Android 经典好文推荐,通过阅读本文,您将收获以下知识点: 一、简介二、Camera AIDL 接口三、Camera Service 主程序 一、简介 Camera Service被设计成一个独立进程,作为一个服务端,处理来…
基于视觉重定位的室内AR导航APP的大创项目思路(3)手机相机内参数据获取和相机标定
文章目录 相机内参为什么要获取相机的内参数据:获取相机内存数据的方法棋盘格标定自动相机标定 前情提要:
是第一次做项目的小白,文章内的资料介绍如有错误,请多包含! 相机内参
相机内参是本身的物理数据,…

尿检设备“智能之眼”:维视智造推出MV-MC 系列医疗专用相机
尿液分析是临床检验的基础常规项目,随着医疗设备的不断发展,尿液分析相关仪器的国产化和自动化程度也进一步提升。2022 年国内尿液分析市场的规模约为 28 亿元,激烈的竞争推动了尿检仪器自动化、智能化升级,在仪器中加入机器视…
彩色相机工作原理——bayer格式理解
早期,图像传感器只能记录光的强弱,无法记录光的颜色,所以只能拍摄黑白照片。
1974年,拜尔提出了bayer阵列,发明了bayer格式图片。不同于高成本的三个图像传感器方案,拜尔提出只用一个图像传感器,在其前面放…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK直接实现Mono16位深度的图像保存(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK直接实现Mono16位深度的图像保存(C) Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:通过BGAPI SDK直接转换保存Mono12/16图像 Baume…
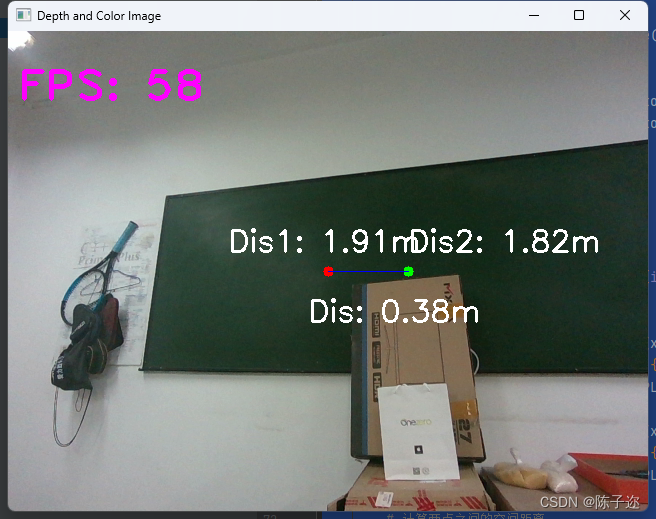
基于intel D4系列深度相机 (D455)的单点测距和两点距离测量(代码讲解超详细)
目录
1.简介 1.1 intel D4系列深度相机 (D455)
1.2结构光(Structured-light)
2.基于深度相机的单点测距和两点距离测量
2.1函数详解
2.2 全部代码 1.简介 1.1 intel D4系列深度相机 (D455)
Intel RealSense D435、D455等D4系列:
Intel D4系列深度相机是由英特…
软键盘控制cesium相机移动旋转
1.有航向 类似于控制飞机飞行
<!DOCTYPE html>
<html lang"en"><head><meta charset"UTF-8"><meta http-equiv"X-UA-Compatible" content"IEedge"><meta name"viewport" content"…
探索视觉系统工作原理,聚焦机器人应用“新视界”
原创 | 文 BFT机器人 01
视觉系统:机器人的“眼睛” 视觉系统是一个非常复杂的系统,包括照明系统、镜头、摄像系统和图像处理系统。机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示。 从功能上看,典型的…
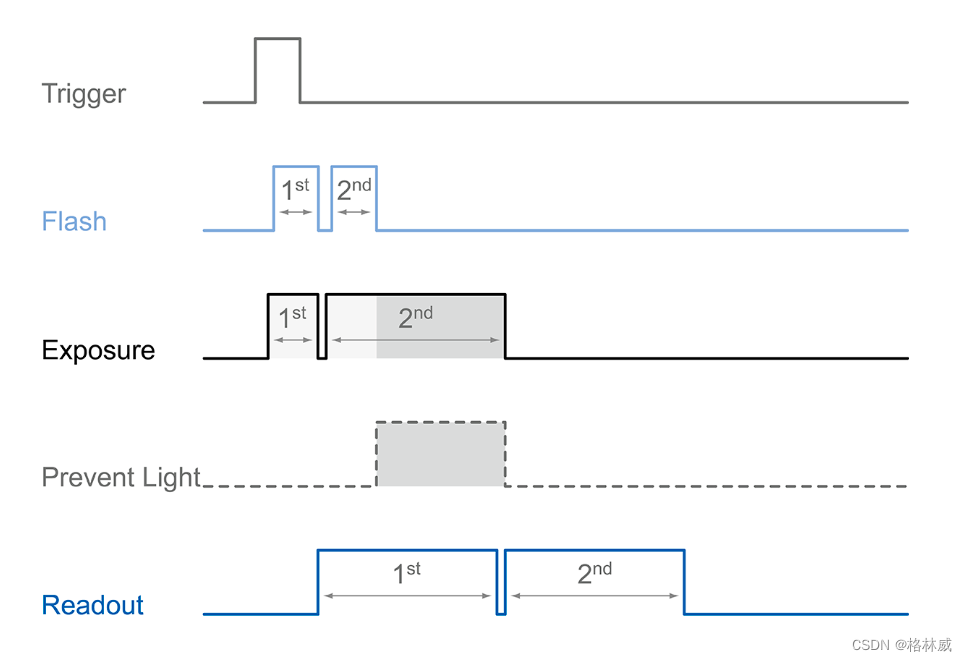
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C#) Baumer工业相机Baumer工业相机BGAPISDK和定序器编程的技术背景Baumer工业相机通过BGAPISDK进行定序器编程功能1.引用合适的类文件2.Baumer工业相机通过BGAPISDK进行定序器…

浅析森林烟火AI检测算法的应用及场景使用说明
一、方案背景
现有的森林防火监测系统落后,以人工地面巡护、瞭望塔高点巡查为主,存在巡护范围有限、巡护效率低等问题,建立健全的森林防火风险预警体系,实现对森林、林场等场景的全天候智能自动监测、火情预警,及时发…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C#) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…

使用 python 在几秒钟内构建你自己的手部探测器
手部探测器不仅仅是一个可以检测和跟踪手部的普通工具,它的意义远不止于此。你可以在从机器人到娱乐领域的各个领域构建令人惊叹的项目。 话不多说,让我们开始编码吧!👨💻 import cv2
import mediapipe as mp 这将导…

Baumer工业相机堡盟工业相机IO介绍与配置
Baumer工业相机堡盟工业相机IO介绍与配置 Baumer工业相机Baumer工业相机IO的作用Baumer工业相机IO的作用Baumer工业相机IO上点连 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运…
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像由Mat转为Qimage(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像由Mat转为Qimage(C)(C) Baumer工业相机Baumer工业相机BGAPISDK和Mat转为Qimage的技术背景Baumer工业相机通过BGAPISDK将相机图像Mat转为Qimage功能1.引用合适的类文件2.通过…
Baumer工业相机堡盟工业相机如何使用BGAPISDK和OpenCV设置图像进行比例显示(C++)
Baumer工业相机堡盟工业相机如何使用BGAPISDK和OpenCV设置图像进行比例显示(C) Baumer工业相机Baumer工业相机BGAPISDK和OpenCV的技术背景Baumer工业相机通过BGAPISDK和OpenCV设置图像进行比例显示功能1.引用合适的类文件2.通过BGAPISDK和OpenCV设置图像…
Android 文本识别:MLKIT + PreviewView
随着移动设备的普及和摄像头的高像素化,利用相机进行文本识别成为了一种流行的方式。MLKit 是 Google 提供的一款机器学习工具包,其中包含了丰富的图像和语言处理功能,包括文本识别。PreviewView 是 Android Jetpack 的一部分,它提…
ORB-SLAM3整体流程详解
0. 简介
在之前,作者曾经转过一篇《一文详解ORB-SLAM3》的文章。那篇文章中提到了ORB-SLAM3是一个支持视觉、视觉加惯导、混合地图的SLAM系统,可以在单目,双目和RGB-D相机上利用针孔或者鱼眼模型运行。与ORB-SLAM2相比,ORB-SLAM3…

DNG格式详解,DNG是什么?为何DNG可以取代RAW统一单反相机、苹果安卓移动端相机拍摄输出原始图像数据标准
返回图像处理总目录:《JavaCV图像处理合集总目录》
前言
在DNG格式发布之前,我们先了解一下之前单反相机、苹果和安卓移动端相机拍照输出未经处理的原始图像格式是什么? RAW 什么是RAW?
RAW是未经处理、也未经压缩的格式。可以…
unity 实现多个物体或单个物体 让其单击物体让其显示再次单击让其隐藏
unity 实现单击物体让其显示或隐藏,再次单击显示或隐藏
using System.Collections; using System.Collections.Generic; using Unity.Burst.CompilerServices; using UnityEngine; using UnityEngine.EventSystems;
public class ToggleObjects : MonoBehaviour {…
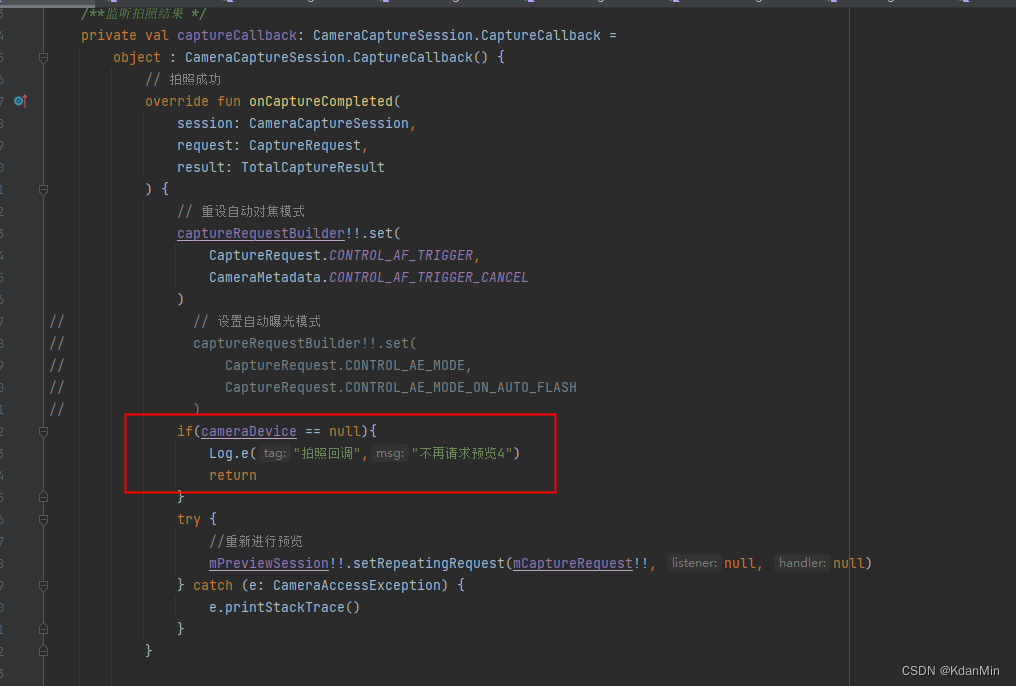
Android 高通Camera2 Camera Device Close
1、很多人看到这个日志第一感觉可能觉得哪里没有合理释放,于是带着这个思路去进行百度探索
2、一开始我去寻找 ImageReader.OnImageAvailableListener 这个问题 var afterBitmap: Bitmap? null/**监听拍照的图片 */private val imageAvailableListener ImageRead…

视觉系统硬件选型简单概述
视觉系统硬件选型简单概述
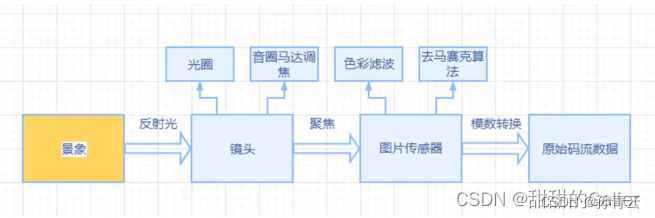
机器视觉大体流程 照射光照射在目标表面,被目标物反射,反射光经过镜头进入相机,目标物的图像就会聚集在CCD图像单元上, 然后通过A/D转换成数字图像,再进行处理,最后输出结果
相…
![相机单独标定的实现过程[autoware标定]、tmp文件的查看方式](https://img-blog.csdnimg.cn/36000a5fe26745019dbdf93a2a8b644a.png)
相机单独标定的实现过程[autoware标定]、tmp文件的查看方式
安装了autoware1.13和calibration标定包,发现实现相机单独标定的过程较为坎坷,参考了一些博主的方法,发现下面的过程更加适合自己,做个笔记。
1安装标定箱(与calibration标定包的安装并不冲突) 标定工具箱…
ROS学习——利用电脑相机标定
一、 安装usb-cam包和标定数据包
sudo apt-get install ros-kinetic-usb-cam
sudo apt-get install ros-kinetic-camera-calibration
要把kinetic改成你自己的ros版本 。
二、启动相机
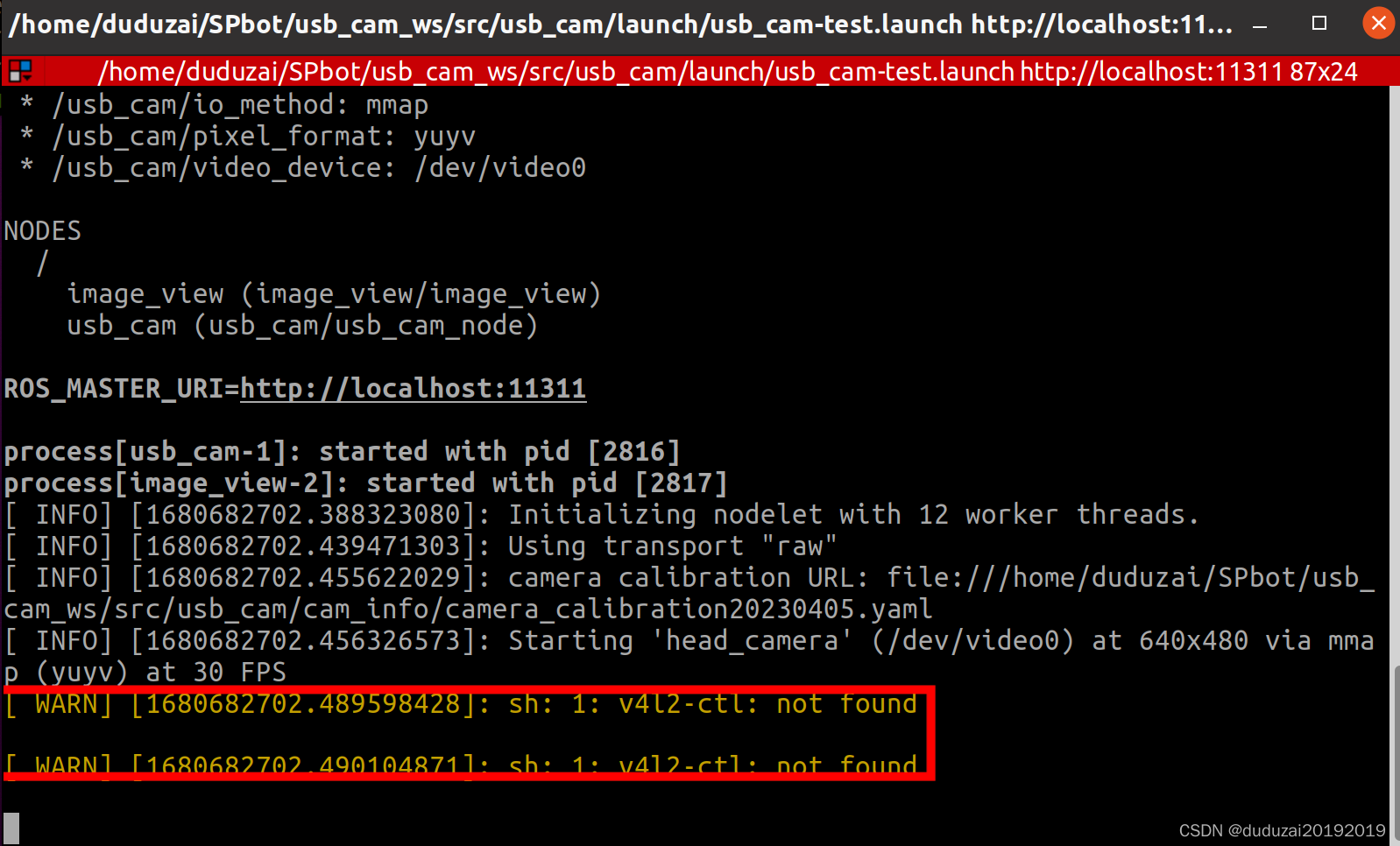
roslaunch usb_cam usb_cam-test.launch
就会出现一个界面 可以通过下面命令查看相机…
usb_cam相机录制rosbag
文章目录运行环境:1.1 usb_cam连接:1.2 usb-cam启动1.2 查看相机话题名称2.1 rosbag录制2.2 播放rosbag运行环境:
ubuntu20.04 noetic 杰瑞微通usb_cam(分辨率640x480) 宏基暗影骑士笔记本
1.1 usb_cam连接ÿ…
使用panda3d写出鼠标移动控制朝向,wasd控制移动的带碰撞的第三人称相机代码
下面是使用 panda3d 写出鼠标移动控制朝向,wasd 控制移动的带碰撞的第三人称相机的代码: python from direct.showbase.ShowBase import ShowBase from panda3d.core import CollisionTraverser, CollisionNode from panda3d.core import CollisionHandl…

tvp5150 若干问题,很好的解答
作者:德州仪器半导体技术(上海)有限公司 通用DSP 技术应用工程师 喻云峰 1.简介 TVP5150系列是一颗使用简易,超低功耗,封装极小的数字视频解码器。使用单一14.31818MHz时钟就可以实现PAL/NTSC/SECAM各种制式的解码&…
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C) Baumer工业相机Baumer工业相机BGAPISDK和定序器编程的技术背景Baumer工业相机通过BGAPISDK进行定序器编程功能1.引用合适的类文件2.Baumer工业相机通过BGAPISDK进行定序器编…
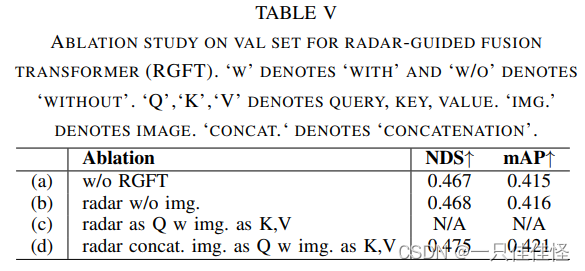
【佳佳怪文献分享】MVFusion: 利用语义对齐的多视角 3D 物体检测雷达和相机融合
标题:MVFusion: Multi-View 3D Object Detection with Semantic-aligned Radar and Camera Fusion
作者:Zizhang Wu , Guilian Chen , Yuanzhu Gan , Lei Wang , Jian Pu
来源:2023 IEEE International Conference on Robotics and Automat…
视觉SLAM【第二讲-初识SLAM】
视觉SLAM,主要指的是利用相机完成建图和定位问题。如果传感器是激光,那么就称为激光SLAM。 定位(明白自身状态(即位置))建图(了解外在环境)。 视觉SLAM中使用的相机与常见的单反摄像…

利用照片携带的EXIF来估计焦距等信息
(本文章大部分内容参考Noah Snavely) 等你利用数码相机拍摄照片时,相机常常会在图片中嵌入很多有用的信息到JPEG文件中。通常涵盖曝光时间、焦点、(照相机,望远镜等的)光圈、是否闪光灯被开启了还有焦距等信…
windows10或者Ubuntu20.04内启动USB外接摄像头并拍照
1. windows10系统内启动摄像头并拍照 1.1 把带摄像头的USB接口插到电脑的USB接口上。
1.2 左下角搜索“设备管理器”,并点击,主要是确保笔记本自带的摄像头被禁用,和usb连接的外部摄像头被起用。 1.3 左下角搜索“相机”,并点击拍…

使用ROS功能包camera_calibration进行单目相机和双目相机的内参和外参标定
1.概述
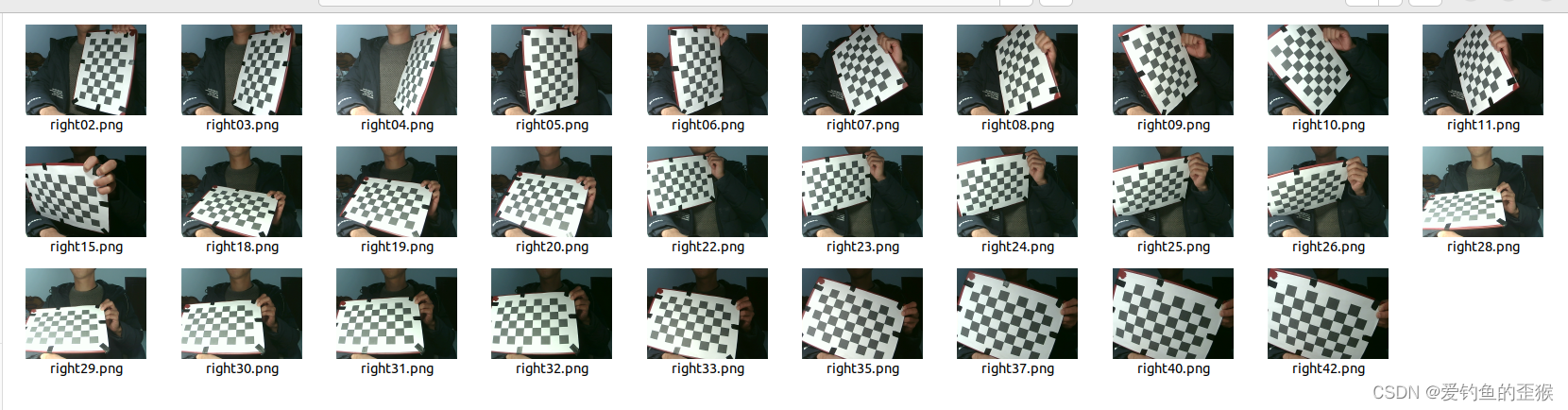
本文总结使用ROS标定单目和双目相机的过程,同时提供生成棋盘格文件的方法。
参考链接: [1]使用ros标定相机的内参和外参 [2]ROS下采用camera_calibration进行双目相机标定
2.生成棋盘格文件
棋盘格可以自己买一个,或者打印一个粘在…
从零实战SLAM-第四课(相机成像及常用视觉传感器)
在七月算法报的班,老师讲的蛮好。好记性不如烂笔头,关键内容还是记录一下吧,课程入口,感兴趣的同学可以学习一下。
--------------------------------------------------------------------------------------------------------…
0基础学习VR全景平台篇 第81篇:全景相机-临云镜如何直播推流
临云镜全景相机是阿里巴巴定制全景设备,实现空间三维信息的快速采集,与阿里云三维空间重建平台搭配,帮助品牌商与平台以较低的成本完成空间的快速采集,并支持对室内/室外空间的三维全景展示及空间漫游,同时支持VR浏览、…

【果树农药喷洒机器人】Part6:基于深度相机与分割掩膜的果树冠层体积探测方法
文章目录 一、引言二、树冠体积测量对比方法2.1冠层体积人工测量法2.2冠层体积拟合测量法 三、基于深度相机与分割掩膜探测树冠体积方法3.1像素值与深度值的转换3.2树冠体积视觉探测法3.3实验分析 总结 一、引言
果树靶标探测是实现农药精准喷施的关键环节,本章以果…
Ubuntu 连接海康智能相机步骤(亲测,成功读码)
ubuntu20.04下连接海康智能相机 Ubuntu 连接海康智能相机步骤(亲测,已成功读码)输出的结果 Ubuntu 连接海康智能相机步骤(亲测,已成功读码)
(就是按照海康的提供的步骤和源码连接相机,流水账)
安装Ubuntu20.04安装gcc和g,IDmvs只…
gazebo各种插件
类别
libgazebo_ros_api_plugin.so:提供与Gazebo仿真环境进行通信的API接口。 libgazebo_ros_block_laser.so:模拟激光传感器的插件。 libgazebo_ros_bumper.so:模拟碰撞传感器的插件。 libgazebo_ros_camera.so:模拟相机传感器的…
【佳佳怪文献分享】通过跨模态监督学习视觉运动
标题:Learning Visual Locomotion with Cross-Modal Supervision
作者:Antonio Loquercio, Ashish Kumar, Jitendra Malik
来源:2023 IEEE International Conference on Robotics and Automation (ICRA 2023)
这是佳佳怪分享的第4篇文章
…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的固定帧率(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的固定帧率(C#) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在BGAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过BGAPI SDK设置相机固定帧…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的固定帧率(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的固定帧率(C) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在BGAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过BGAPI SDK设置相机固定帧…
数字图像处理-AWB跳变
1、自动白平衡(AWB)算法是相机中常用的图像处理技术,它能够自动调整图像中的白平衡,使得图像中的颜色更加真实、自然。然而,在实际应用中,AWB算法也存在着一些问题,例如AWB跳变(Whit…
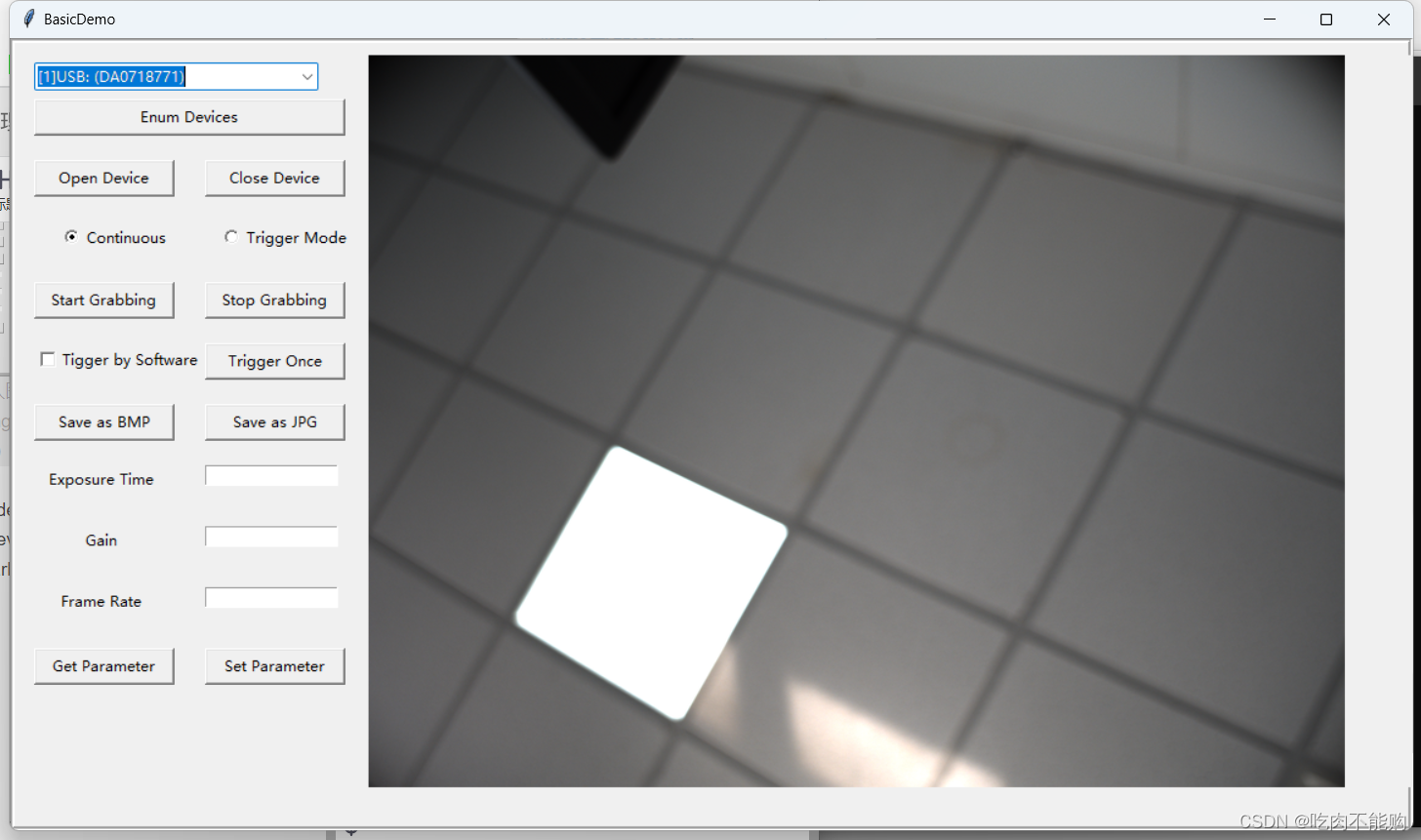
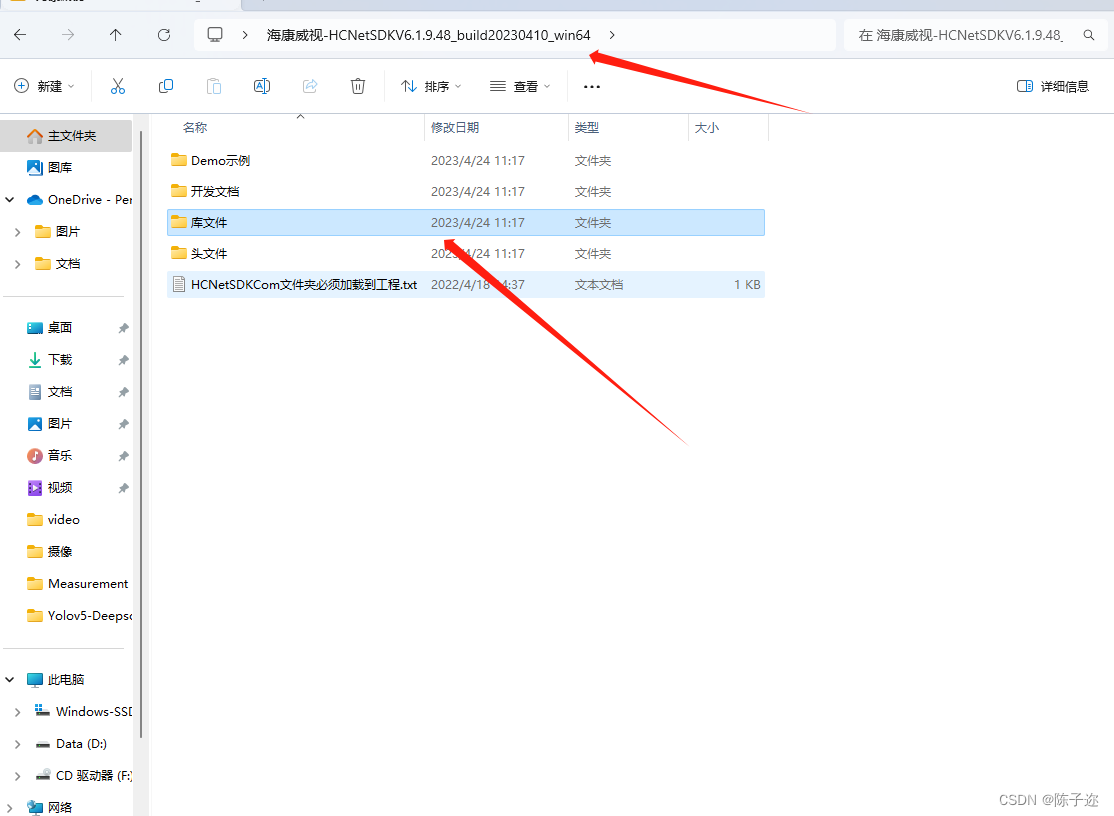
win11 电脑 使用 python 连接USB 海康工业相机 运行示例程序 BasicDemo.py
win11 电脑 使用 python 连接USB 海康工业相机 运行示例程序 BasicDemo.py
1.下载海康的mvs客户端和mvs_sdk驱动
官网链接: https://www.hikrobotics.com/cn/machinevision/service/download?module0 下载这两个东西,然后安装 1.1 我的mvs安装在
F:\…
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像高速保存到电脑内存(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像高速保存到电脑内存(C#) Baumer工业相机Baumer工业相机图像保存到电脑内存的技术背景代码分析注册SDK回调函数BufferEvent声明可以存储相机图像的内存序列和名称在图像回调函数中将图像保存在内存序…
ubuntu20.04 安装使用 Indemind 双目相机
1、先按照官方wiki搭建环境
Ubuntu 安装 — IMSEE SDK 1.4.2 文档(ubuntu20使用官网会报错,可以参考我下面的步骤)
1.1、获取代码
sudo apt-get install git
git clone https://github.com/indemind/IMSEE-SDK.git
1.2、准备依赖
cd <…
Threejs学习05——球缓冲几何体背景贴图和环境贴图
实现随机多个三角形随机位置随机颜色展示效果
这是一个非常简单基础的threejs的学习应用!本节主要学习的是球面缓冲几何体的贴图部分,这里有环境贴图以及背景贴图,这样可以有一种身临其境的效果!这里环境贴图用的是一个.hdr的文件…

【Unity-Cinemachine相机】虚拟相机旋转Composer属性详解
Look At和Aim本质是控制虚拟相机自身的旋转,并不一定非要看着,或者并不一定非要瞄着这里的游戏对象
Look At和Aim是以Look At里面的对象作为参考来旋转自身 Do nothing:表现出来的行为和Look At空出来一样
Composer:是一个标准的…

【Unity小技巧】可靠的相机抖动及如何同时处理多个震动
每篇一句
围在城里的人想逃出来,站在城外的人想冲进去,婚姻也罢,事业也罢,人生的欲望大都如此。——钱钟书《围城》
前言
相机的抖动我相信大家都不陌生,网上其实已经有非常非常多的教程了,之前我也写过…
【Unity小技巧】如何在 Unity 中使用我们的Cinemachine虚拟相机跟踪多个目标
文章目录 每篇一句前言安装虚拟相机跟随多个目标和间隙占比代码控制添加主角目标代码控制添加敌人目标扩展代码如何实现虚拟相机跟随玩家呢?我们来实现一下修改虚拟相机的视野修改虚拟相机的位置和角度 推荐完结 每篇一句
岂不闻天无绝人之路,只要我想走…

使用 Python 的高效相机流
一、说明 让我们谈谈在Python中使用网络摄像头。我有一个简单的任务,从相机读取帧,并在每一帧上运行神经网络。对于一个特定的网络摄像头,我在设置目标 fps 时遇到了问题(正如我现在所理解的——因为相机可以用 mjpeg 格式运行 30…

二.镜头知识之镜头总长,法兰距,安装接口
二.镜头知识之镜头总长,法兰距,安装接口 文章目录 二.镜头知识之镜头总长,法兰距,安装接口2.1 线激光模组镜头的FBL 与 TTL(Total Track Length) 镜头总长2.2 相机法兰距2.3 线激光模组镜头的TTL 以及 From Barrel bottom to imag…
ubuntu20.04 MYNTEYE S 相机运行与标定记录
ubuntu20.04 MYNTEYE S 相机运行与标定记录
环境
ubuntu20.04 opencv3.3.1
硬件
mynteye S1030
OpenCV 3.4.3 安装
Jetson Nano小觅相机(MYNT EYE S)开发调试指南
mkdir -p ~/tools/opencv
cd ~/tools/opencvgit clone https://github.com/opencv/opencv.git
cd opencv/…
ModuleNotFoundError: No module named ‘omni‘
install isaac sim on linux
open the isaac sim folder in /home//.local/share/ov/pkg/isaac_sim-2022.1.1
source setup_python_env.sh
./python.sh standalone_examples/replicator/offline_generation.pyNo module named ‘omni.isaac’

3D成像 3D图映射
概述
参考资料:《Learning OpenCV》,Stanford University CS 131 Computer Vision Foundations and Applications 2016 - lecture10
相机成像是将3D信息映射到2D如何从2D图像重建3D信息? 阴影、纹理、聚焦等这里主要关注运动作为线索&#…
dpkg工具、ZED相机sdk、监控nvidia
1.dpkg工具的选项学习 dpkg命令是Debian Linux系统用来安装、创建和管理软件包的实用工具。 语法
dpkg(选项) (参数)
选项
-i:安装软件包;
-r:删除软件包;
-P:删除软件包的同时删除其配置文件;
-L…
妙鸭相机功能代码复现
妙鸭相机功能代码复现
妙鸭相机主要实现人脸替换与人脸高清增强修复功能。可通过两种方式实现Roop和Lora模型。
RooP笔记
基础模型:inswapper_128.onnx
人脸分析模型:insightface
高清增强模型:gfpgan
大体流程为通过insightface检测出人脸,替换人脸,使用gfpgan对人…
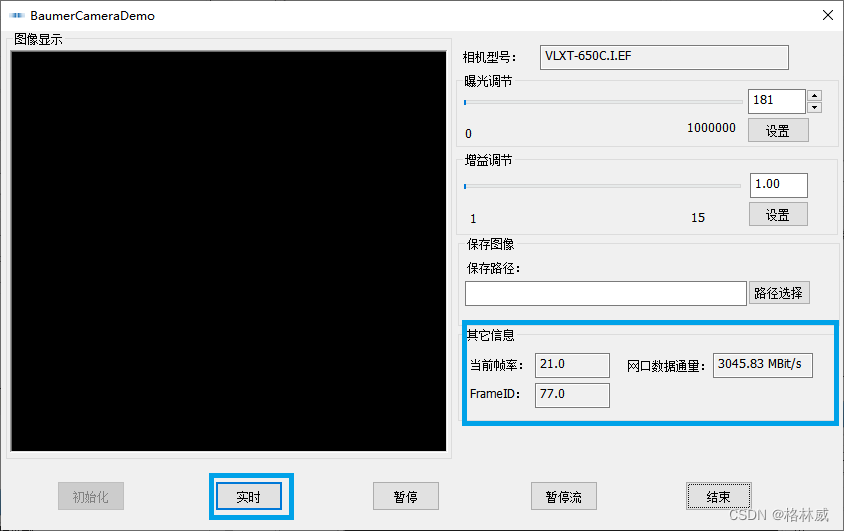
MasterAlign相机参数设置-增益调节
相机参数设置-曝光时间调节操作说明
相机参数的设置对于获取清晰、准确的图像至关重要。曝光时间是其中一个关键参数,它直接影响图像的亮度和清晰度。以下是关于曝光时间调节的详细操作步骤,以帮助您轻松进行设置。
步骤一:登录系统
首先&…
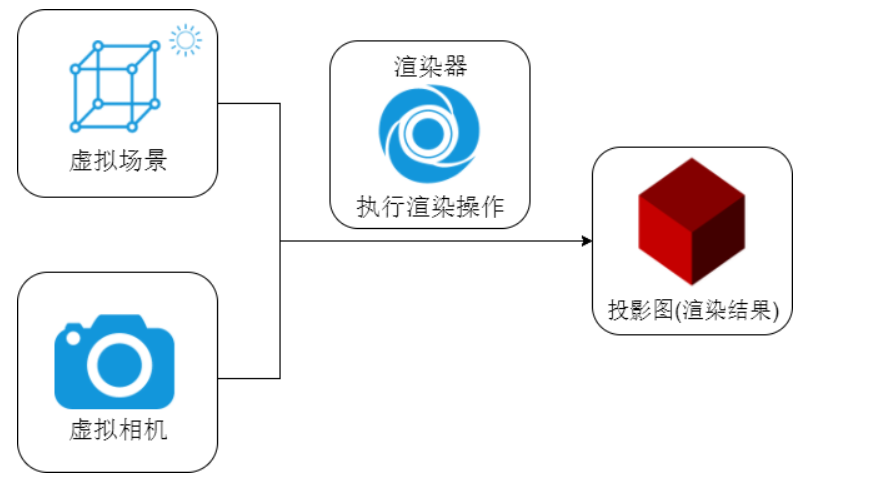
Three.js教程:渲染器
推荐:将 NSDT场景编辑器加入你的3D工具链。 其他系列工具: NSDT简石数字孪生 渲染器
生活中如果有了景物和相机,那么如果想获得一张照片,就需要你拿着相机,按一下,咔,完成拍照。对于threejs而言…
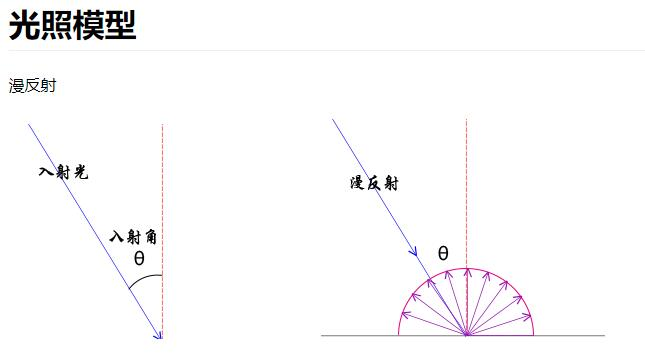
Three.js教程:平行光与环境光
推荐:将 NSDT场景编辑器 加入你的3D工具链 其他系列工具: NSDT简石数字孪生 平行光与环境光
本节课通过平行光DirectionalLight (opens new window)和环境光AmbientLight (opens new window)进一步了解光照对应模型Mesh表面的影响。 点光源辅助观察Poin…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取一种偏振格式(AOP、DOLP或ADOLP)的图像(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK一种偏振格式(AOP、DOLP或ADOLP)的图像(C) Baumer工业相机Baumer工业相机的偏振相机的技术背景Baumer工业相机通过BGAPI SDK在获取一种偏振格式(AOP、DOLP或ADOLP…
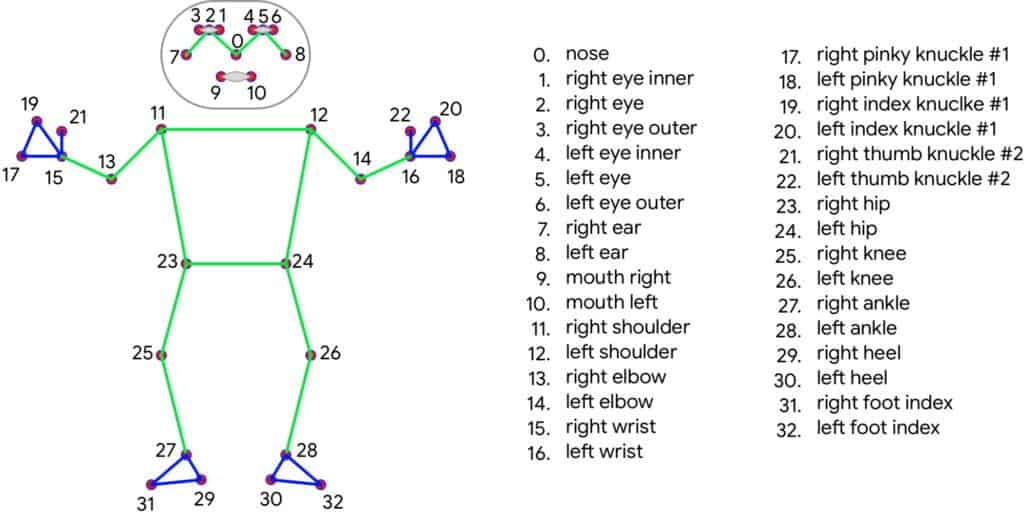
使用 MediaPipe 身体跟踪构建不良身体姿势检测和警报系统
文末附实现相关源代码下载链接 正确的身体姿势是一个人整体健康的关键。然而,保持正确的身体姿势可能很困难,因为我们经常忘记这一点。这篇博文将引导您完成为此构建解决方案所需的步骤。最近,我们在使用 MediaPipe POSE 进行身体姿势检测方面玩得很开心。 使用 MediaPipe P…
Baumer工业相机堡盟工业相机如何使用新版本NEOAPI SDK控制相机数据流的开启和关闭(C++)
Baumer工业相机堡盟工业相机如何使用新版本NEOAPI SDK控制相机数据流的开启和关闭(C) Baumer工业相机Baumer工业相机NEOAPI SDK的技术背景Baumer工业相机使用NEOAPISDK控制相机数据流的方式1.引用合适的类文件2.使用NEOAPISDK控制相机数据流的方式2.使用…
Baumer工业相机堡盟工业相机如何通过BGAPISDK复制内存空间存储图像数据序列(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK复制内存空间存储图像数据序列(C#) Baumer工业相机Baumer工业相机BGAPISDK和复制内存空间存储图像的技术背景Baumer工业相机通过BGAPISDK复制内存空间存储图像功能1.引用合适的类文件2.通过BGAPISDK建立内存空…

NXP i.MX 8M Mini的视频开发案例分享 (下)
本文主要介绍i.MX 8M Mini的视频开发案例,包含基于GStreamer的视频采集、编解码、算法处理、显示以及存储案例,GigE工业相机测试说明,H.265视频硬件解码功能演示说明等。
注:本案例评估版采用的是创龙科技TLIMX8-EVM,…

友思特案例|友思特 Ensenso 3D相机:汽车工业自动化的革命性力量
01 内容摘要
在竞争激烈的汽车行业,自动化生产至关重要。友思特 Ensenso 3D相机为汽车制造商提供了可靠的工具和技术支持,助力多个关键环节。它在汽车座位泡棉切割中提高精确度,降低浪费,提高生产效率;在汽车压铸零部…
Threejs学习04——球缓冲几何体环境光以及直线光源
实现随机多个三角形随机位置随机颜色展示效果
这是一个非常简单基础的threejs的学习应用!本节主要学习的是球面缓冲几何体在环境光合直线光源下的效果,可以学习到环境光和直线光源的生成效果等功能!主要使用的是球缓冲几何体对象SphereGeome…

二、高通相机bringup 流程
和你一起终身学习,这里是程序员Android 经典好文推荐,通过阅读本文,您将收获以下知识点: 一、相机Sensor 点亮相关的文件二、Sensor 驱动文件详解 一、相机Sensor 点亮相关的文件 1.1 Sensor 驱动XML以及CPP文件 Sensor 文件路径:…
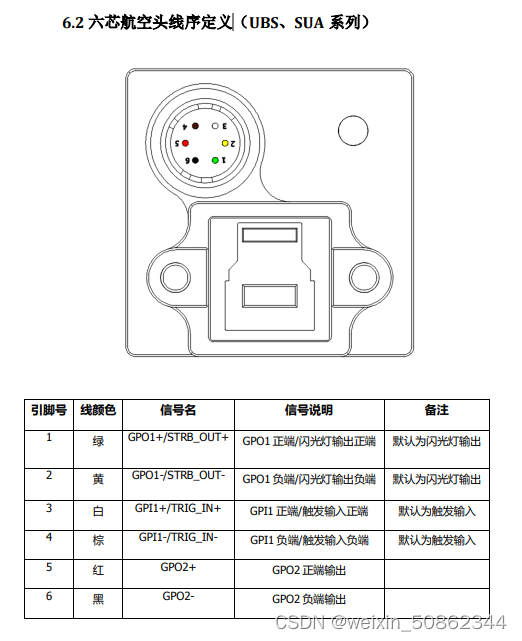
【计算机视觉】相机基本知识(还在更新)
1.面阵工业相机与线阵工业相机
1.1 基本概念区别
面阵相机则主要采用的连续的、面状扫描光线来实现产品的检测;
线阵相机即利用单束扫描光来进行物体扫描的工作的。
1.2 优缺点
(1)面阵CCD工业相机:
优点:应用面…

Baumer工业相机堡盟工业相机如何联合BGAPI SDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#)
Baumer工业相机堡盟工业相机如何联合BGAPI SDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#) Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:BGAPI SDK在图像回调中联合O…

摩托车外廓尺寸检测软件
本系统为摩托车外廓尺寸检测软件,该系统共涉及两种测量方法:自动测量和手动测量,旨在测量出每一台摩托车的外廓尺寸,包括但不限于摩托车的车长、车宽、车高、轮距、前悬、后悬、前伸距等需要测量的参数,可通过运行软件…
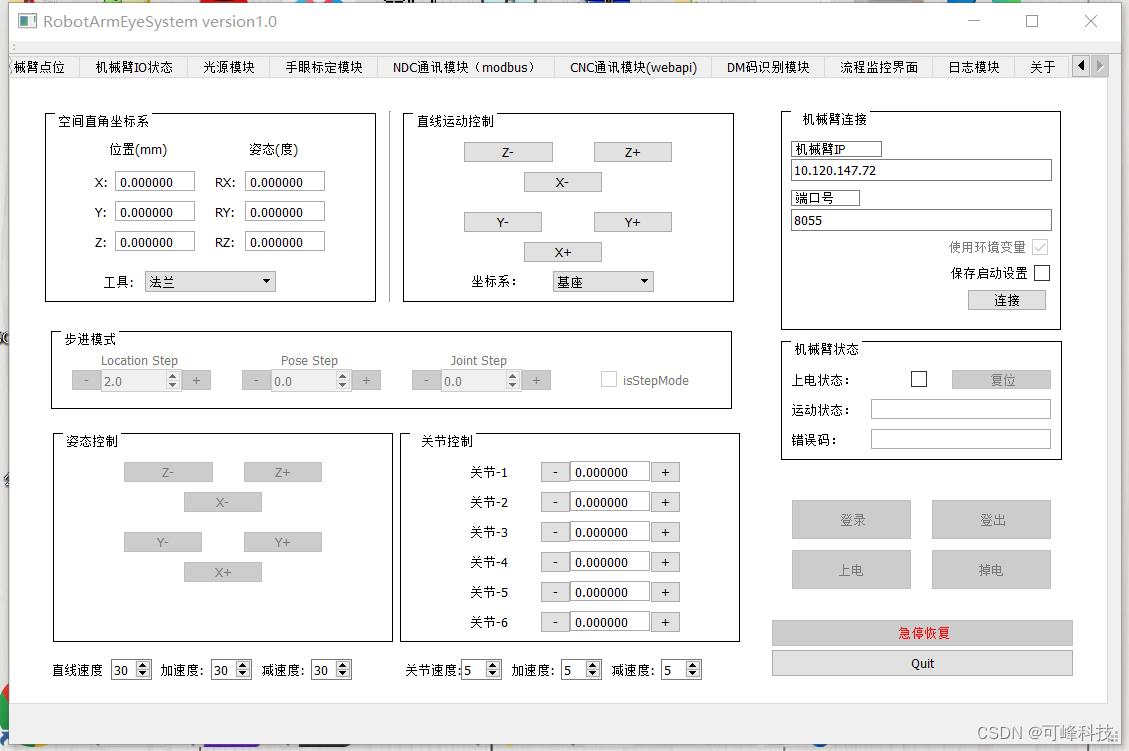
机械臂+2d相机实现复合机器人定位抓取
硬件参数
机械臂:艾利特 相机:海康相机 2d识别库:lindmod,github可以搜到 光源:磐鑫光源
软件参数
系统:windows / Linux 开发平台:Qt 开发语言:C 开发视觉库:OpenCV …
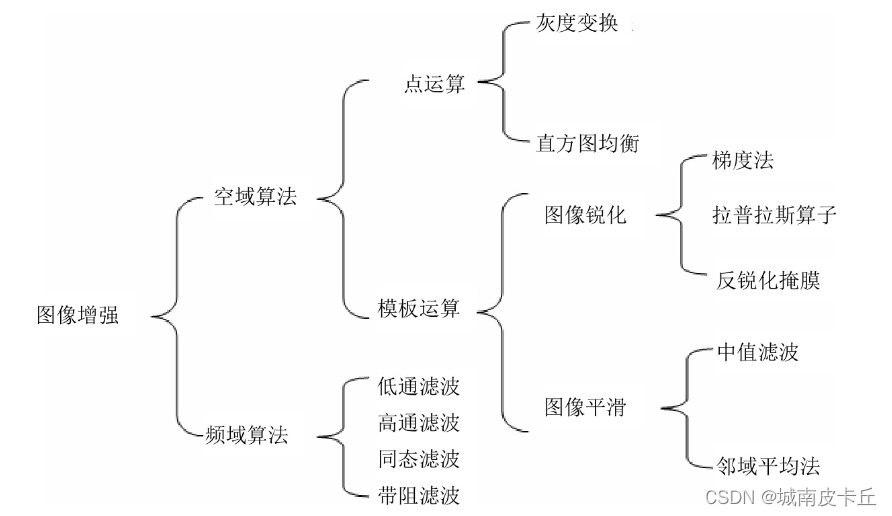
open cv快速入门系列---数字图像基础
目录 一、数字图像基础
1.1 数字图像和图像单位
1.2 区分图片分辨率与屏幕分辨率
1.3 图像的灰度与灰度级
1.4 图像的深度
1.5 二值图像、灰度图像与彩色图像
1.6 通道数
二、数字图像处理
2.1 图像噪声及其消除
2.2 数字图像处理技术
2.2.1 图像变换
2.2.2 图像增强…
osg利用setNodeMask和Switch隐藏节点用法说明
目录
1. 用法及差异点说明
2.利用NodeMask隐藏节点
2. Switch节点
3. NodeMask和Switch混用 1. 用法及差异点说明 在osg中使Node隐藏方式有两种,一种是设置NodeMask,另外一种是使用osg的Switch类来控制。两者的区别:前者只是看不到&#…

【模方ModelFun】实景三维建模和修模4.0.7最新版安装包以及图文安装教程
模方ModelFun 具有多种功能,旨在帮助用户进行实景三维建模和修模。以下是一些主要功能的简要介绍: 实景三维建模:【模方ModelFun】提供了自动化的实景三维重建功能,可以从实景图像中提取几何形状和纹理信息,生成高质量…

Android 13 骁龙相机点击拍照流程分析(一)——点击拍照到更新到左下角缩略图
一.背景
由于最近客户定制需要将文件挂载类型修改为sdcardfs,由于修改了文件挂载类型,导致了骁龙相机拍照后不能点击进入相册,故对骁龙相机从点击事件开始进行问题的排查,此处不介绍最终的sdcardfs挂载后的问题解决方案 二.流程介绍
拍照的流程大概分为几个阶段:打开相机…
2023/09/22 制作demo期间心得
A*的估价函数:例如A->C,会计算A到B的距离B到C的距离作为成本,雕刻不会导致全局路线的重新计算,凸多边形是一个内部为凸集的简单多边形。 简单多边形的下列性质与其凸性等价:1、所有内角小于等于180度。 2、任意两个…
Android 13 骁龙相机点击拍照流程分析(二)——点击拍照到存入相册
一.前言 本篇是在Android 13 骁龙相机点击拍照流程分析(一)——点击拍照到更新到左下角缩略图文章的基础上进行延申的,前面的预览、点击拍照的过程参考第一篇:Android 13 骁龙相机点击拍照流程分析(一)——点击拍照到更新到左下角缩略图-CSDN博客 二.生成图片并保存 从第…

【立体视觉(四)】之极线校正与双目视觉
【立体视觉(四)】之极线校正与双目视觉 一、极线校正一)Fusiello校正法1. 转换矩阵计算1)计算旋转矩阵 R n R_n Rn2)计算内参矩阵 K n K_n Kn3)计算转换矩阵 T T T 2. 核线影像生成 二、双目视觉 此…
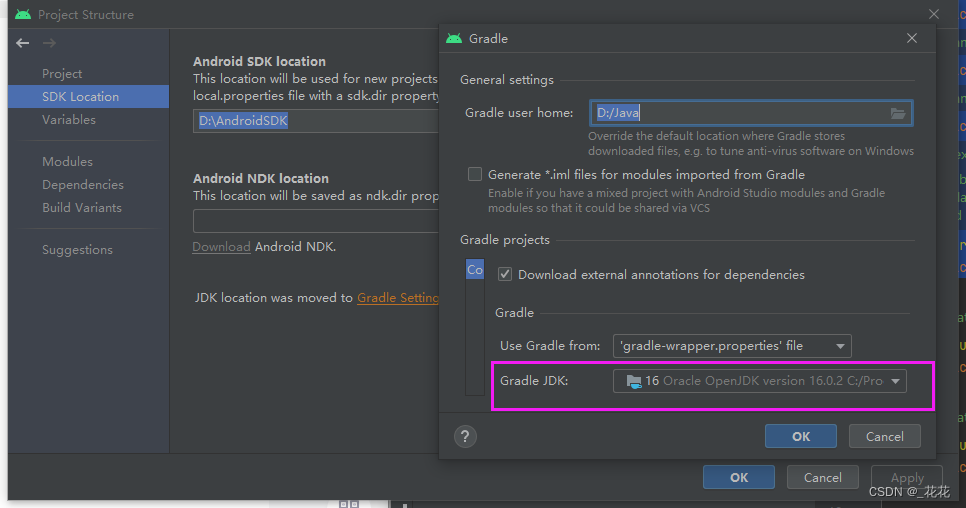
Android相机调用-CameraX【外接摄像头】【USB摄像头】
Android相机调用有原生的Camera和Camera2,我觉得调用代码都太复杂了,CameraX调用代码简洁很多。
说明文档:https://developer.android.com/jetpack/androidx/releases/camera?hlzh-cn
现有查到的调用资料都不够新,对于外接摄像…
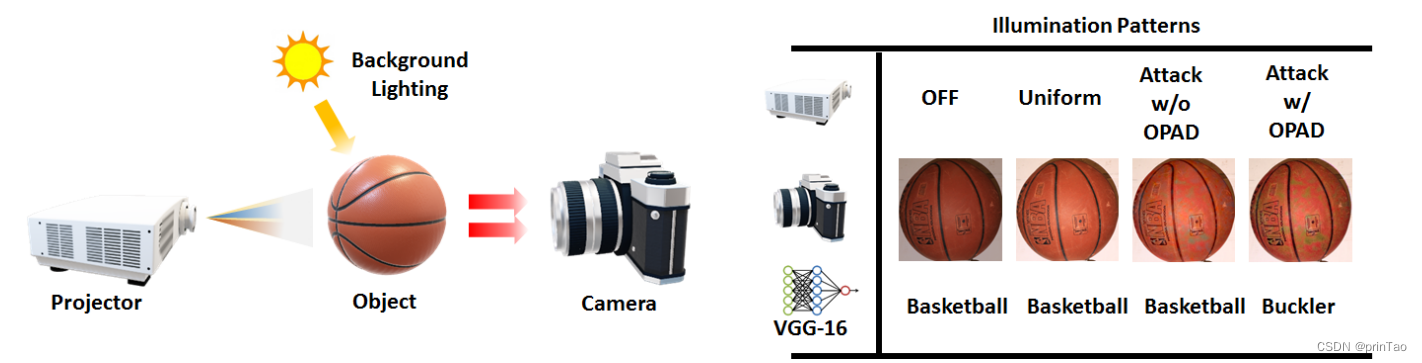
【Adversarial Attack in Object Detection】物理对抗攻击和防御
目录 安全监控 **有无意义**无意义的补丁有意义的补丁 光学对抗攻击对抗灯干扰相机成像 攻击方法White-box attacksGradient-based attacks Optimization-based attacks Black-box attacksQuery-based attacksEvolution algorithm OUTLOOK 在计算机视觉中,根据实现…
【Unity的HDRP渲染管线下实现好用的GUI模糊和外描边流光效果_Blur_OutLine_案例分享(内附源码)】
实现好用的模糊效果_Blur HDRP渲染管线下搭建场景创建RenderTextureRenderTexture 与相机的配置:UI层 Canvas的不同Render Mode:Canvas 在Screen Space - Overlay 模式下:UI旋转Y轴,没有透视。切换到Screen Space - Camera 模式下:UI层跑到物体后面去了,将Plane Distance…
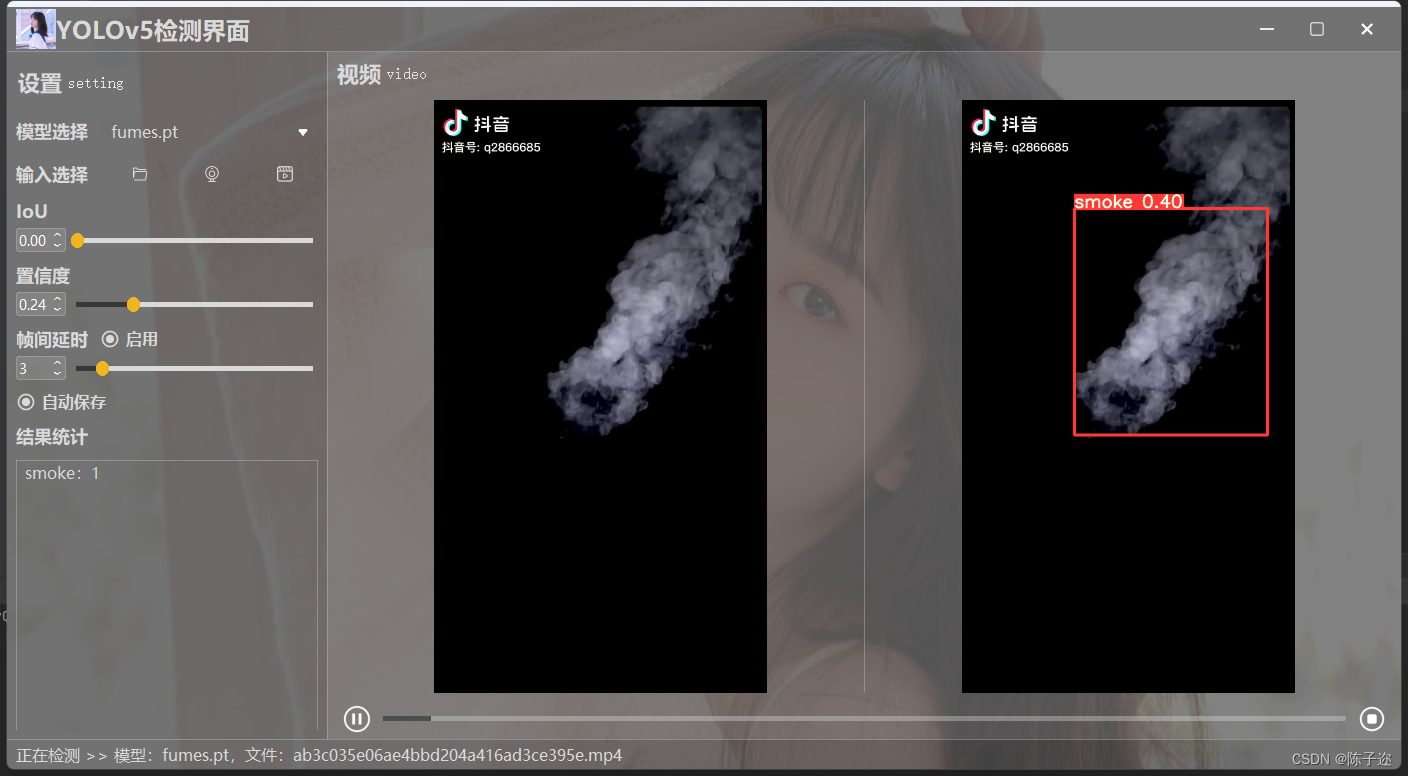
基于YOLOv5、YOLOv8的烟雾报警检测(超实用项目)
目录
1.简介
2.YOLO算法
3.基于YOLOv5、YOLOv8的烟雾检测报警系统
3.1gui界面主代码
3.2YOLOv5主代码 视频已上传b站
YOLOv5、YOLOv8检测-烟雾检测报警系统_哔哩哔哩_bilibili
本文为系列专栏,包括各种YOLO检测算法项目、追踪算法项目、双目视觉、深度结构…
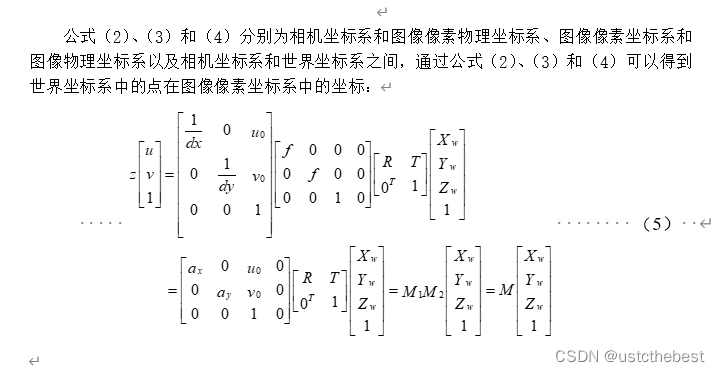
matlab相机标定实验
实验原理
1. 相机标定坐标系
相机的参数对目标的识别、定位精度有很大的影响,相机标定就是为了求出相机的内外参数。标定中有3个不同层次的坐标系:世界坐标系、相机坐标系和图像坐标系(图像物理坐标系和图像像素坐标系)。世界坐…

3D深度视觉与myCobot 320机械臂无序抓取
今天我记录使用myCobot320 M5跟FS820-E1深度相机进行一个无序抓取物体的分享。
为什么会选择深度相机和机械臂做一个案例呢?
2D相机(最常见使用的相机)可以捕捉二维图像,也就是在水平和垂直方向上的像素值。它们通常用于拍摄静态…
让高分辨率的相机芯片输出低分辨率的图片对于像素级的值有什么影响?
很多图像传感器可以输出多个分辨率的图像,如果选择低分辨率格式的图像输出,对于图像本身会有什么影响呢?
传感器本身还是使用全部像素区域进行感光,但是在像素数据输出时会进行所谓的降采样(down-sampling)…
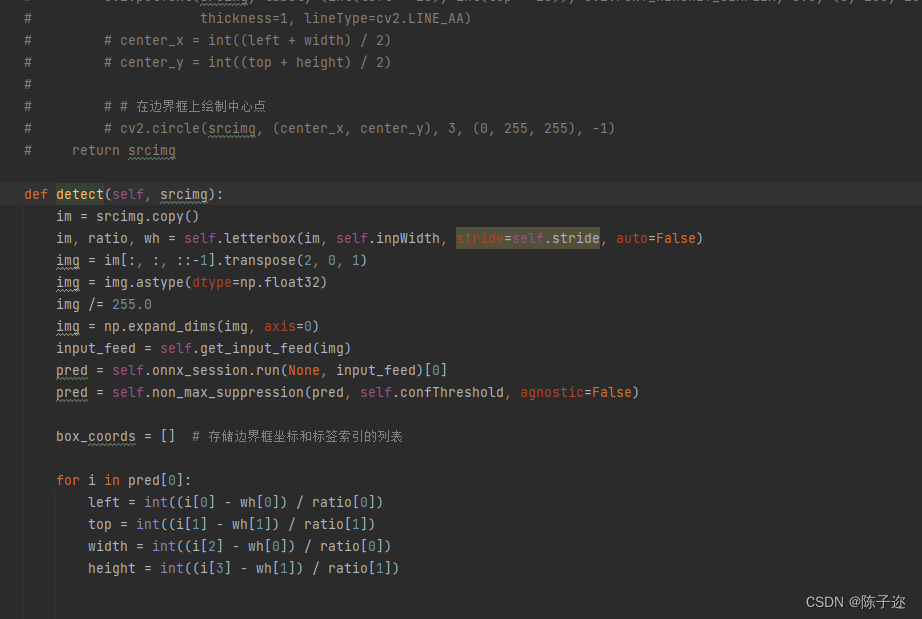
基于YOLO算法的单目相机2D测量(工件尺寸和物体尺寸)
1.简介
1.1 2D测量技术
基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。
工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2D测量技术可以用于检测和测量零件尺寸、位置、形状等参数,进而实…

4.44ue4:相机抖动
1.创建相机抖动类
右键内容面板,点击创建蓝图类,搜索shake(camera shake)
2.使用相机抖动:
节点:play world .. api解释:
epicenter:震源
inner Radius:内圈范围&a…
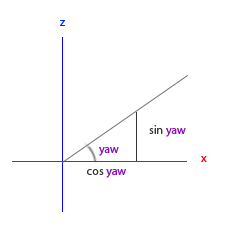
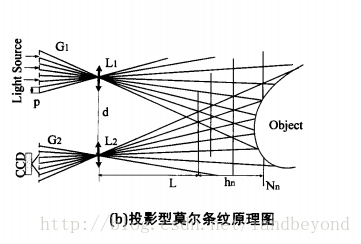
结构光三维测量几种比较成熟的方法
1.飞行时间发
原理:通过直接测量光传播的时间,确定物体的面型。发射脉冲信号,接受发射回的光,计算距离。
精度:毫米级
优点:原理简单,可避免阴影和遮挡等问题,且仪器便携化。
缺点:精度相对较低 2.莫尔条纹法
原理:采用两组光栅,一个主光栅,一个基准光栅,通过…
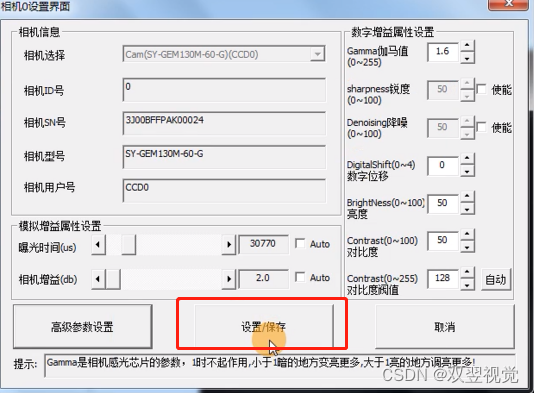
MasterAlign相机参数设置-曝光时间调节
相机参数设置-曝光时间调节操作说明
相机参数的设置对于获取清晰、准确的图像至关重要。曝光时间是其中一个关键参数,它直接影响图像的亮度和清晰度。以下是关于曝光时间调节的详细操作步骤,以帮助您轻松进行设置。
步骤一:登录系统
首先&…
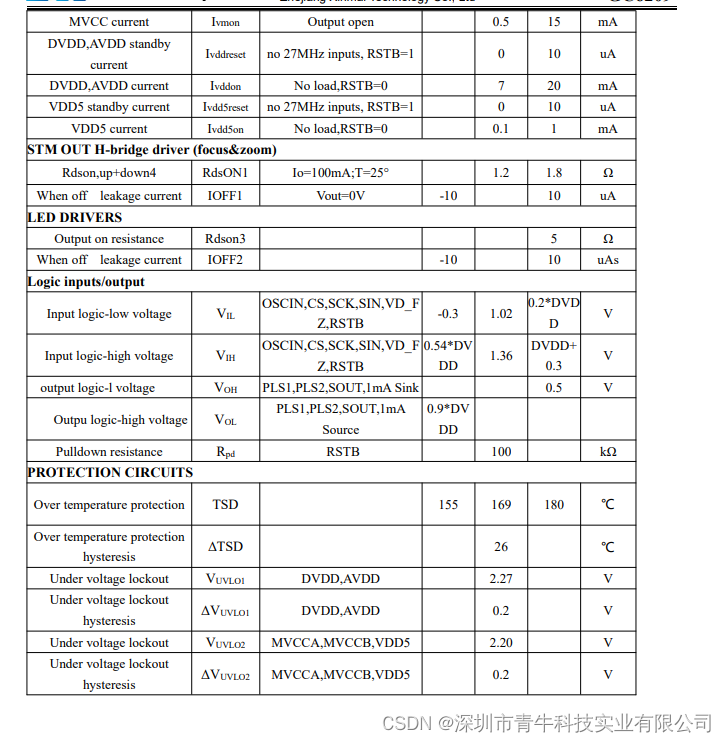
5V摄像机镜头驱动,小云台驱动,低噪步进电机驱动芯片,应用于摄像机 机器人等产品中
GC6209是双通道5V低压步进电机驱动器,具有低噪声。低振动特性,特别适用于相机的变焦和对焦系统万向节和其他精密低噪声STM控制系统。 芯片应用于 摄像机,医疗器械,机器人 消费类产品等 芯片特点: 内置2个STM驱动器…
ubuntu 外置相机使用记录
电脑系统:ubuntu20.04 相机:小觅相机D1000-IR-120
问题: 按照官方教程安装SDK后,试图通过例程获取图像
./samples/_output/bin/get_stereo_image终端报段错误,也就是运行失败。 问题分析: 运行ls /dev/vi…
ROS订阅相机图像消息,并将图像保存为视频帧
需求
需要编写一个Python程序,订阅电脑外接的深度相机发出的视频消息,录制视频并逐帧保存为图片到本地,用于采集制作数据集的图片信息
运行环境
Ubuntu18.04 ROS Melodic Python2.7
Python程序
#!/usr/bin/env python
# -*- coding: u…

pcl--第十二节 2D和3D融合和手眼标定
2D&3D融合
概述
截止目前为止,我们学习了机器人学,学习了2D和3D视觉算法。我们也学习了2D相机(图像数据的来源)和3D相机(点云数据的来源)工作原理。
实际上,我们最终要做的,是一个手眼机器人系统。在这个系统里,…
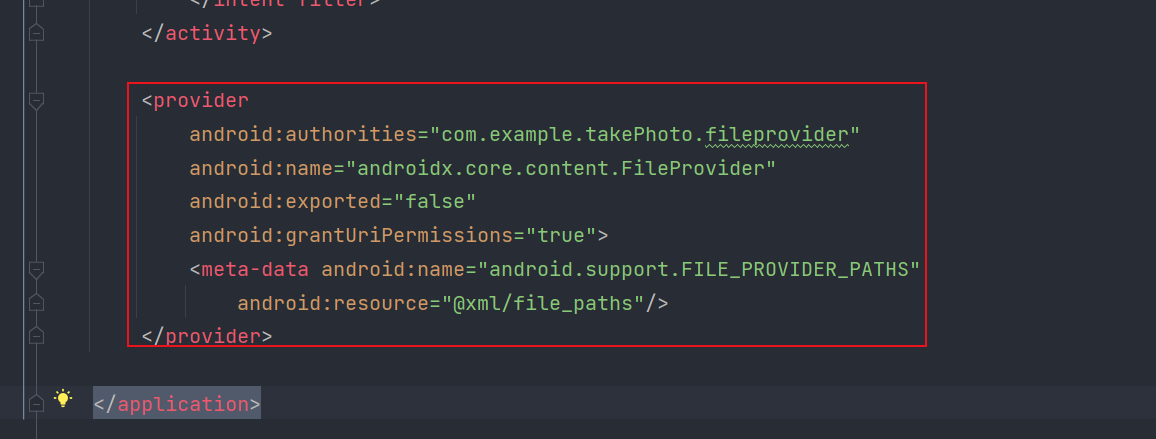
Android---打开相机拍照
简单实现打开系统系统相机拍一张图片并显示在UI上,适用与个人主页头像的切换。 1. 添加权限。AndroidManifest.xml里添加使用相机的权限。
<uses-permission android:name"android.permission.CAMERA"/>
2. 布局。布局内容比较交单,一…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…
Unity3D 检测鼠标位置的Sprite像素颜色
思路
获取鼠标所在屏幕坐标(Vector2)通过相机ScreenToWorldPoint(Vector3)转为世界坐标 (注意Vector3的z是距离相机的距离,相机需要正交)通过SpriteRenderer访问边界Bounds通过Bounds.Contain检测世界坐标是否在SpriteBounds内通过比例计算来确定在Sprite内的UV坐标…

展会邀请 | 虹科诚邀您参加8月16日深圳视觉系统设计技术会议
VisionCon视觉系统设计技术会议
将于8月16日在深圳深铁皇冠假日酒店隆重举行!
人力成本的提高、国际关系的不确定性等众多因素,都在促使中国制造业采用更先进的自动化及智能化技术,同时也在加速核心技术的国产化。作为智能制造不可或缺的关…
使用apriltag_ros检测相机姿态
0 环境
Nvidia Jetson Orin NXJetpack 5.1.1双目相机ROS noetic
1 相机驱动
1.1 建立ROS工作空间
建立工作空间
# 在home下名为catkin_ws的新建文件夹
mkdir -p ~/catkin_ws/src# 进入catkin_ws文件夹
cd ~/catkin_ws/src# 将当前文件夹属性转化为工作空间
catkin_init_w…
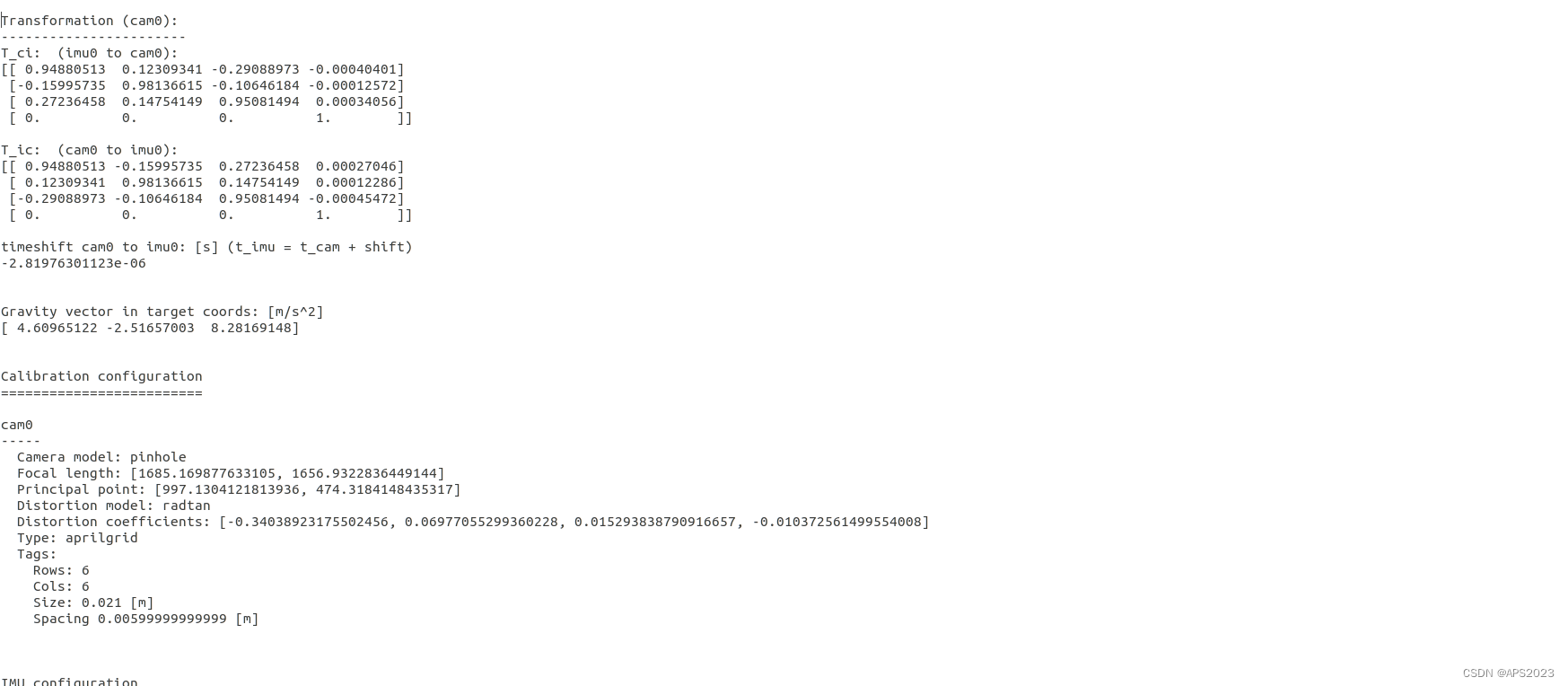
使用kaliber与imu_utils进行IMU、相机+IMU联合标定
目录 1 标定工具编译
1.1 IMU标定工具 imu_utils
1.2 相机标定工具 kaliber
2 标定数据录制
3 开始标定
3.1 IMU标定
3.2 相机标定
3.3 相机IMU联合标定
4 将参数填入ORBSLAM的文件中 1 标定工具编译
1.1 IMU标定工具 imu_utils 标定IMU我们使用imu_utils软件进行标定…
Threejs学习02——使用dat.gui实现主动控制立方体相关操作
使用dat.gui实现主动控制立方体相关操作
这是一个非常简单基础的threejs的学习应用!在上一章学习threesj中我们实现立方体在坐标轴中来回移动,那都是通过我们的代码写死的效果,然后立方体的颜色都是通过代码写死的,这一章我们来给…
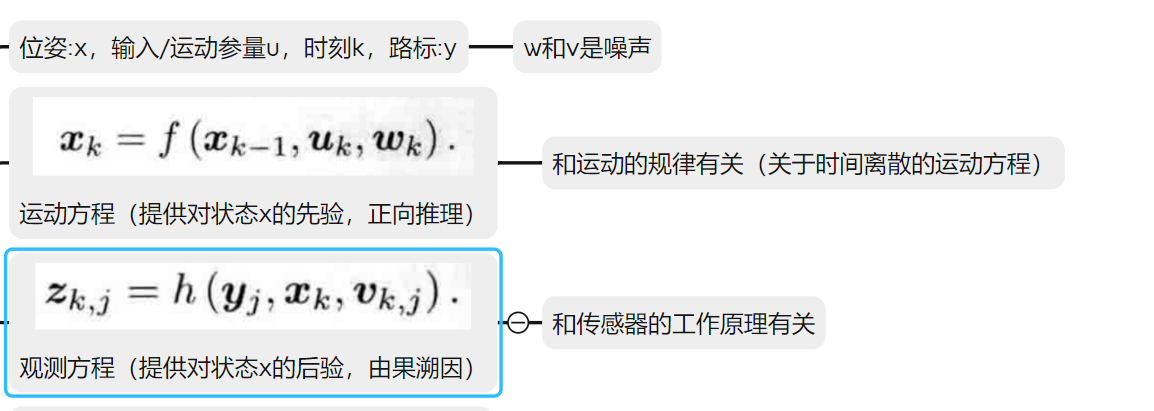
【第二讲---初识SLAM】
SLAM简介
视觉SLAM,主要指的是利用相机完成建图和定位问题。如果传感器是激光,那么就称为激光SLAM。 定位(明白自身状态(即位置))建图(了解外在环境)。 视觉SLAM中使用的相机与常见…

四.镜头知识之放大倍率
四.镜头知识之放大倍率 文章目录 四.镜头知识之放大倍率4.0 前言4.1 镜头的光学放大倍率的计算方法4.2 显示器的电子放大倍率4.2.1 智能硬件产品的显示放大倍率计算案例 4.3 系统放大倍率4.4 智能硬件产品的系统放大倍率计算案例4.4 智能硬件产品的系统放大倍率计算案例 4.0 前…
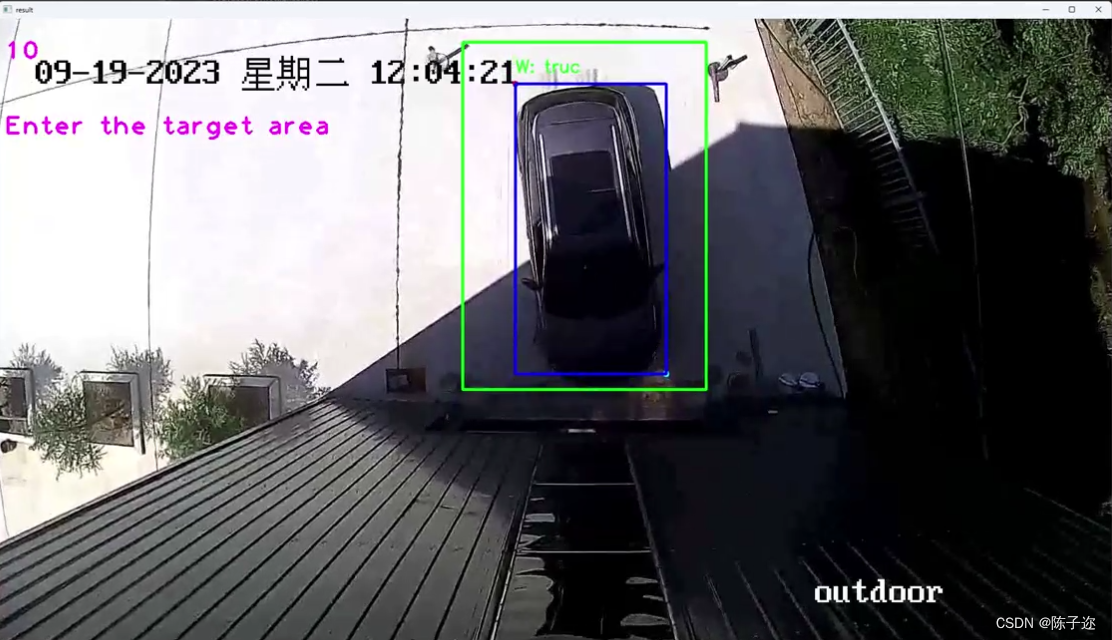
基于YOLO算法的单目相机2D测量(工件尺寸和物体尺寸)三
1.简介
1.1 2D测量技术
基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。
工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2D测量技术可以用于检测和测量零件尺寸、位置、形状等参数,进而实…
相机SD卡数据丢失如何恢复?
出门在外,相机是人们记录生活点滴的重要工具,是旅游的最佳玩伴。人们每到一个地方,都喜欢用相机来见证自己来过的痕迹,拍好的照片都会被放到相机卡里,但在使用相机时,有时我们会意外删除了重要的照片或视频…
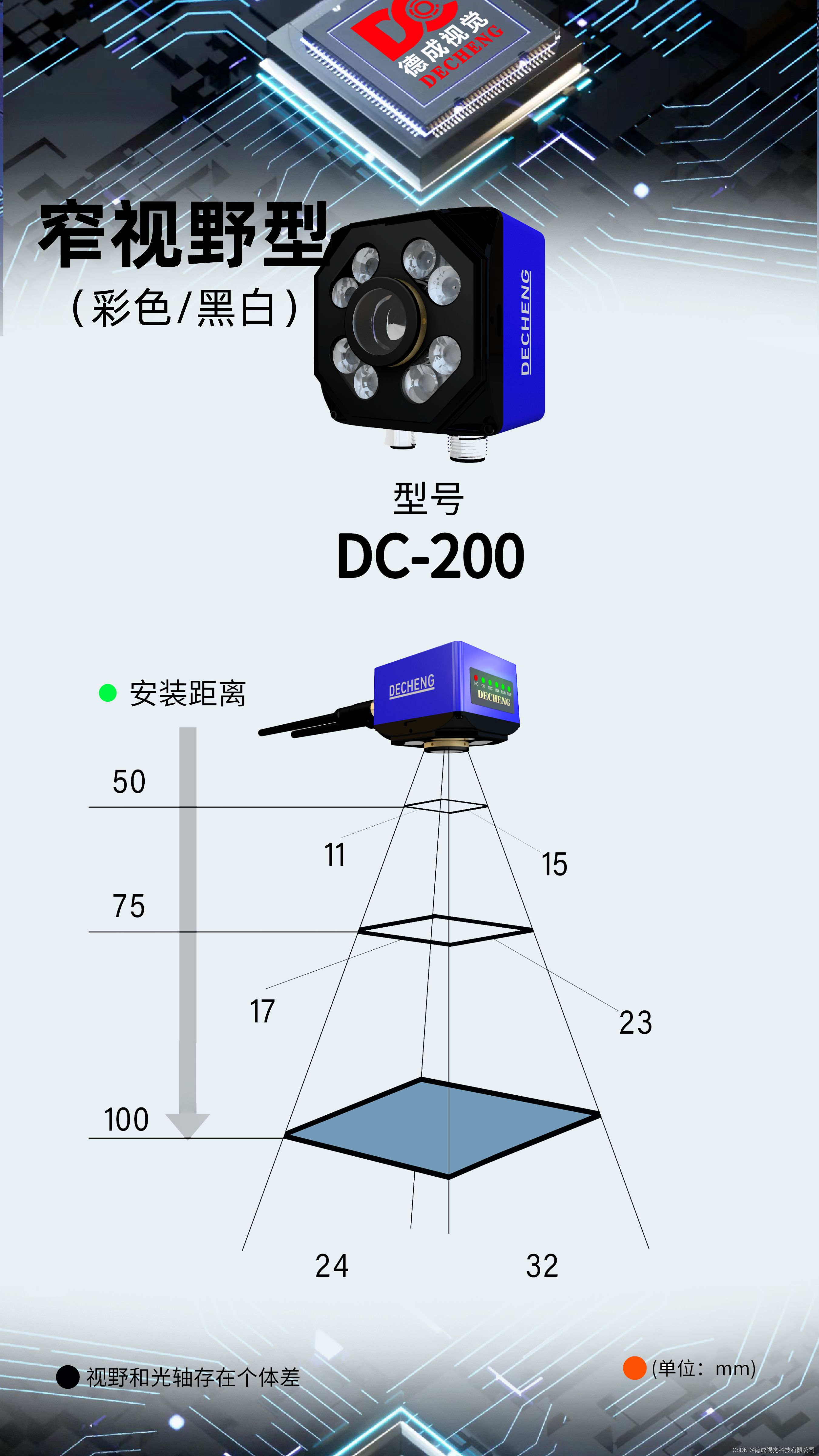
为什么智能相机需要搭配镜头使用?
镜头作用是将光学图像聚焦在图像传感器的光敏面阵上。不同类型的工业镜头,成像质量也各不相同,成像质量也有差异,影响工业镜头的因素有哪些呢 图像中心与边缘的影响图像中心较边缘分辨率高;图像中心较边缘光场照度高;像…
Baumer工业相机堡盟工业相机如何使用BGAPISDK生成视频(C++)
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还…
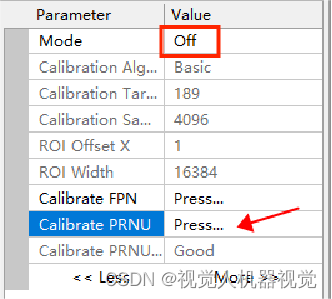
线扫相机DALSA-相机平场矫正详细步骤
在相机视野下铺放白色亚克力板或纯白纸,采集图像。打开曲线图。 选择 Line Profile 模式。调节好相应所需的曝光时间、光源、增益和镜头光圈,让白平衡纸显示出来的灰度值大概在 150-200 左右。 在Calibration Algorithm 中将显示的数值设置好。 先暗场…
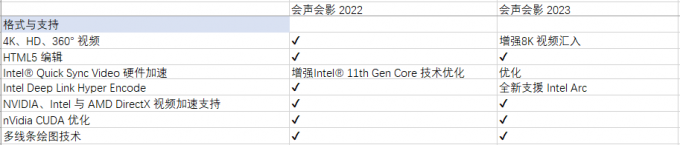
会声会影2024对比2023变化以及功能对比
全新会声会影2024版本现已登场,小伙伴们相信已经急不可待地想知道2024版到底有哪些新功能。对比2023版本,会声会影2024版本有没有功能的增强?事不宜迟,现在就让我们一起来看看会声会影2024对比2023的变化,包括功能对比…

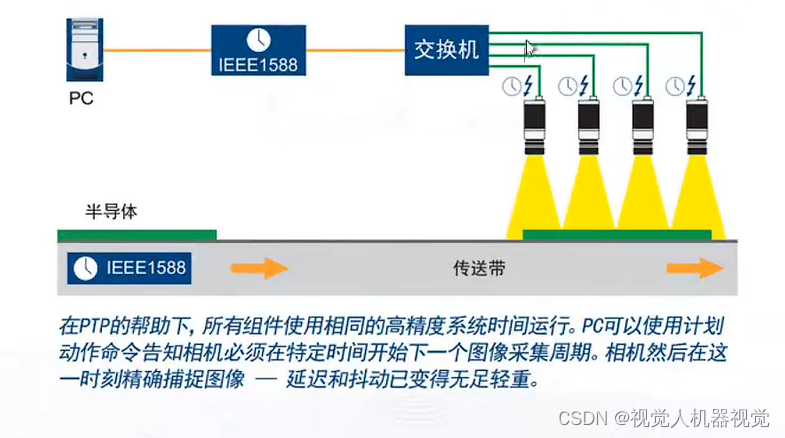
海康多个相机如何提高同时取像
PTP全称为Precision Time Synchronization Protocol,.即精确时间同步协议,它实现的是IEEE标准1588中定义的 PTP版本。用于对标准以太网或其他采用多播技术的分布式总线系统中的传感器、执行器以及其他终端设备中的时钟进行亚微秒级同步。EEE1588可以以纯软件的方式实…

在opencv OpenCV中打开相机摄像头,用分水岭算法实时实现图像的分割与提取
import cv2
import numpy as np# 定义回调函数
def callback(x):pass# 打开摄像头
cap cv2.VideoCapture(0)# 创建窗口和控件
cv2.namedWindow(image)
cv2.createTrackbar(threshold, image, 0, 255, callback)# 初始化参数
bgdModel np.zeros((1, 65), np.float64)
fgdModel…
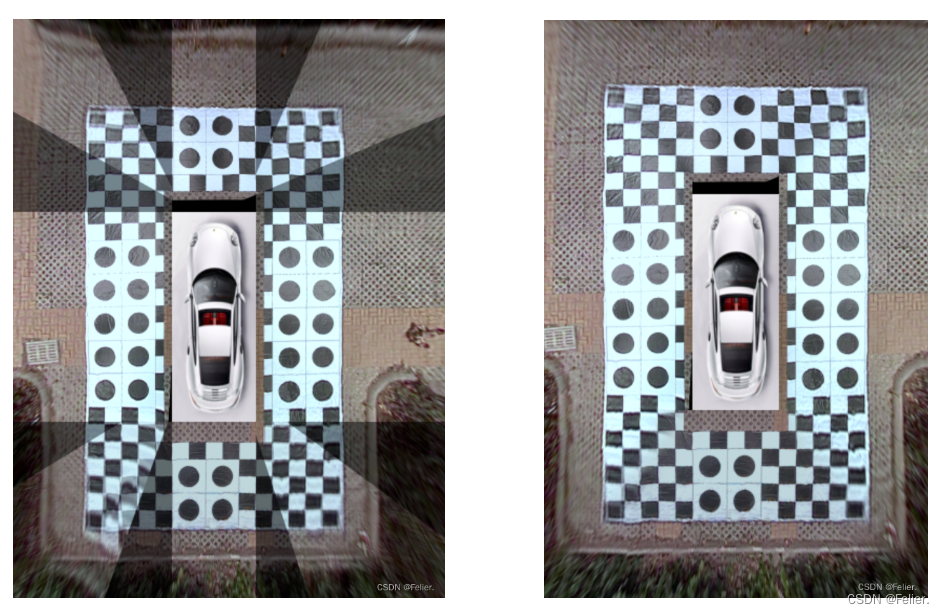
从开源项目聊鱼眼相机的“360全景拼接”
概述 写这篇文章的原因完全源于开源项目(GitHub参阅参考文献1)。该项目涵盖了环视系统的较为全貌的制作过程,包含完整的标定、投影、拼接和实时运行流程。该篇文章主要是梳理全景拼接技术中的一些实现细节,并在些地方记录了自己的思考。鉴于该开源项目&a…
机器视觉halcon-机器视觉标定和测量
Halcon是一种强大的机器视觉软件库,用于开发和部署机器视觉应用程序。在机器视觉中,标定和测量是两个重要的任务,用于确保图像中的对象位置和尺寸的准确性。以下是使用Halcon进行机器视觉标定和测量的一般步骤: 机器视觉标定&…
Unity 后期特效用到的一些方法:OnRenderImage Blit
1.OnRenderImage (RenderTexture source, RenderTexture destination)
当这个函数被调用时,所有的渲染已经完成,渲染结果以参数source传入到函数中。它允许你对最终的显示图像进行处理。所以说是后期特效。
处理的最终结果会输入到destination中。如果…

iOS--UIimagePickerController
iOS--UIimagePickerController 前记UiimagePickerControlllerviewdidloadpresstapgettoCameragettoPhoto切换头像UIimagePickerController常用代理方法 演示图片 前记
写完知乎日报之后,不知道该学些什么东西,但总的和以后写的项目有关,所以…
Unity——URP相机详解
2021版本URP项目下的相机,一般新建一个相机有如下组件 1:Render Type(渲染类型)
有Base和Overlay两种选项,默认是Base选项 Base:主相机使用该种渲染方式,负责渲染场景中的主要图形元素 Overlay(叠加):使用了Oveylay的…
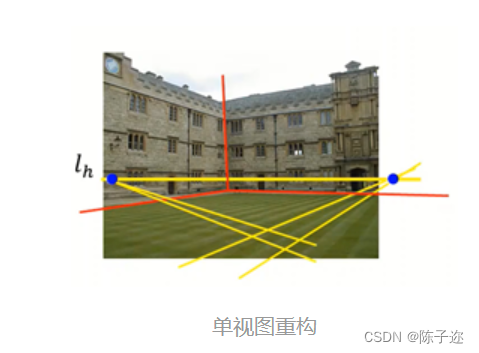
双目视觉实战--单视图测量方法
目录 一.简介
二、2D变换
1. 等距变换(欧式变换)
2. 相似变换
3. 仿射变换
4. 射影变换(透视变换)
5. 结论
三、影消点与影消线
1. 平面上的线
2. 直线的交点
3. 2D无穷远点
4. 无穷远直线
5. 无穷远点的透视变换与仿…

OpenCV实现求解单目相机位姿
单目相机通过对极约束来求解相机运动的位姿。参考了ORBSLAM中单目实现的代码,这里用opencv来实现最简单的位姿估计. mLeftImg cv::imread(lImg, cv::IMREAD_GRAYSCALE);
mRightImg cv::imread(rImg, cv::IMREAD_GRAYSCALE);
cv::Ptr<ORB> OrbLeftExtractor …
ZED相机获取图像python
import pyzed.sl as sl
import cv2
import numpy as np
import osclass CameraZed2:def __init__(self,resolutionNone,fps30,depthMode None):self.zed sl.Camera()self.input_type sl.InputType()self.init_params sl.InitParameters(input_tself.input_type)# 设置分辨率…
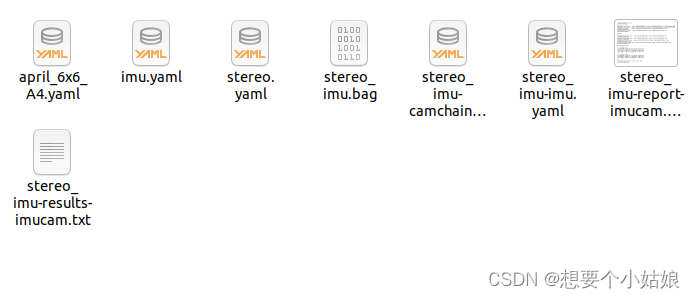
d435i 相机和imu标定
一、IMU 标定
使用 imu_utils 功能包标定 IMU,由于imu_utils功能包的编译依赖于code_utils,需要先编译code_utils,主要参考
相机与IMU联合标定_熊猫飞天的博客-CSDN博客
Ubuntu20.04编译并运行imu_utils,并且标定IMU_学无止境的…
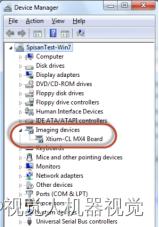
线扫相机DALSA--常见问题一:软件安装顺序
1.软件安装顺序 先安装:Sapera_LT_SDK,后安装Xtium-CL MX4驱动。 2.初次安装CamExpert,重启电脑后未找到相机 Settings(搜索协议)配置完毕后,需点击Detect Camera(一键查找相机)按钮,搜索相机。第一次查找相机耗时会略…
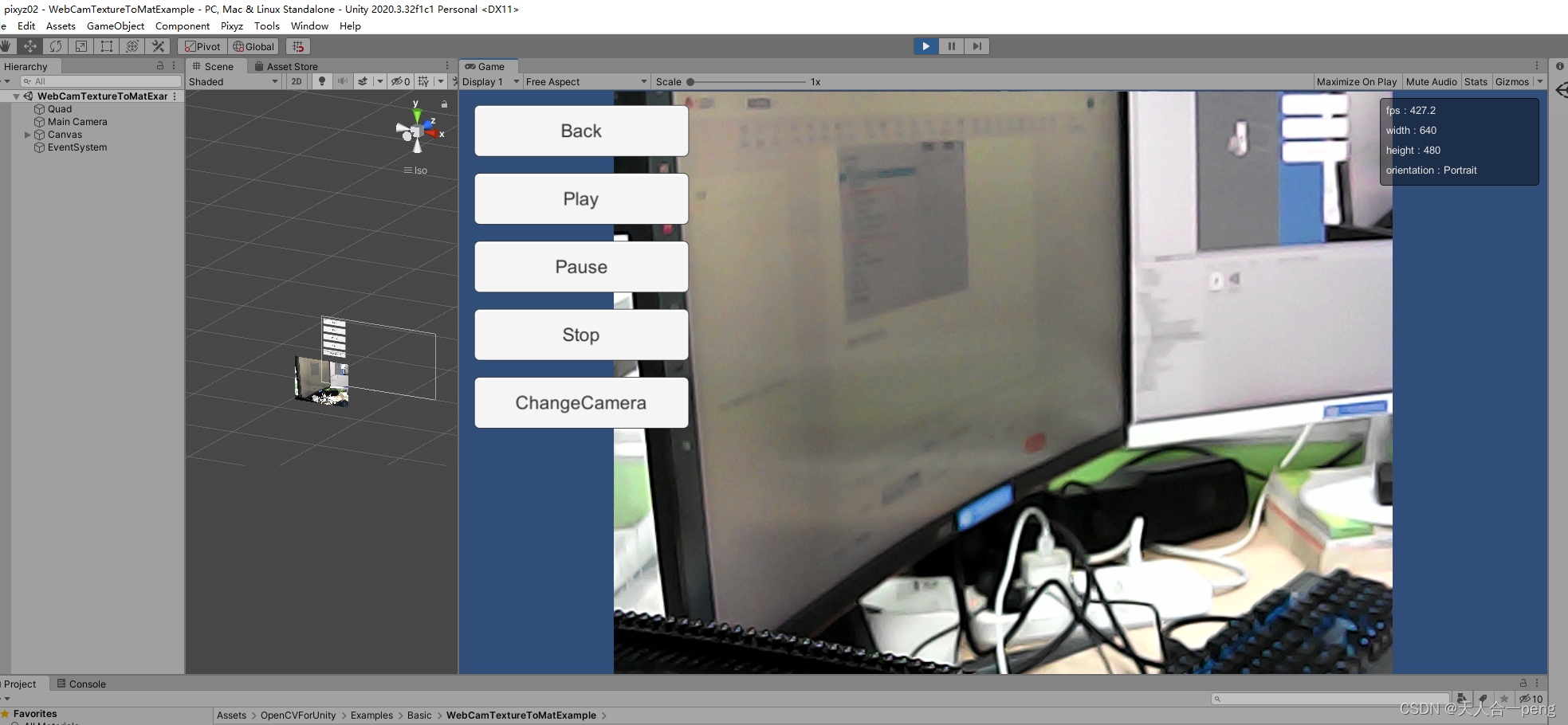
opencv for unity package在unity中打开相机不需要dll
下载OpenCV for Unity 导入后,里面有很多案例 直接打开就可以运行
打开相机
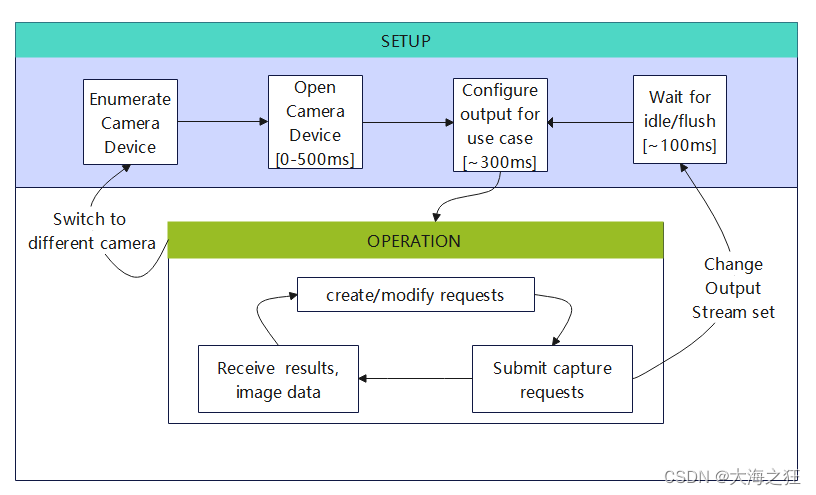
Android相机-架构3
目录
引言
1. Android相机的整体架构
2. 相机 HAL
2.1 AIDL相机HAL
2.2 相机 HAL3 功能
3. HAL子系统
3.1 请求
3.2 HAL和相机子系统
3.2.1 相机的管道
3.2.2 使用 Android Camera API 的步骤
3.2.3 HAL 操作摘要
3.3 启动和预期操作顺序
3.3.1 枚举、打开相机设备…
Unity实战(10):如何将某个相机的画面做成贴图(RenderTexture)
目录 前言
一、创建物体、材质与相机
二、将RenderTexture赋给材质
2.1 修改rt1的一些属性
2.2 将rtMat1材质的shader改为Unlit/Texture,并将rt1赋给这个材质
三、效果呈现 前言
本文记录如何将某个相机的画面做成贴图,即游戏某些场景中小地图做法…
【Unity小技巧】可靠的相机抖动及如何同时处理多个震动(附项目源码)
文章目录 每篇一句前言安装虚拟相机虚拟相机震动测试代码控制震动清除震动控制震动的幅度和时间 两个不同的强弱震动同时发生源码完结 每篇一句
围在城里的人想逃出来,站在城外的人想冲进去,婚姻也罢,事业也罢,人生的欲望大都如此…
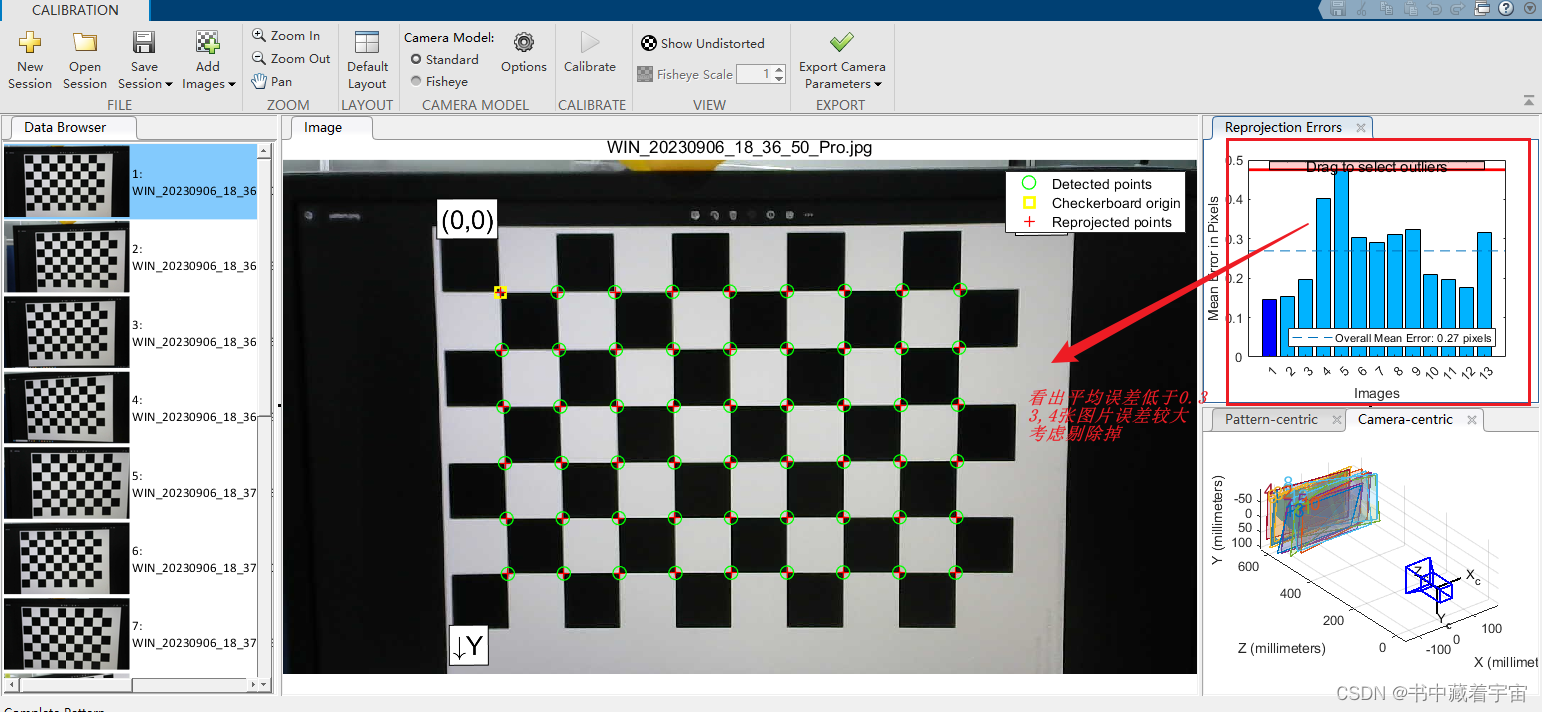
matlab相机标定求得相机内参
素材下载
可以去官网下载标定板,然后使用我们的相机进行拍照(10~15张即可): 下载请点击这里:here
在拍摄照片之前,先量取对应的每个方格的长度: 如下: 使用MATLAB标定
打开MATLAB的命令行: 输入 cameraCalibrator #调用标定的工具箱 添加的是刚刚我们拍照标定板的…
c++调用相机进行保存
调用相机进行保存
cv::VideoWriter 是 OpenCV 中的一个类,用于将图像序列保存为视频文件。它提供了一个方便的方法,可以将一系列帧以特定的编码方式写入视频文件,从而创建自定义的视频。
cv::VideoWriter(const String& filename, int …

佳能相机拍出来的dat文件怎么修复为正常视频
3-3
佳能相机是普通人用得最多的相机之一,也有一些专业机会用于比较重要的场景,比如婚庆、会议录像、家庭录像使用等。
但作为电子产品,经常会出现一些奇怪的故障,最严重的应该就是拍出来的东西打不开了。 本文案例是佳能相机拍…
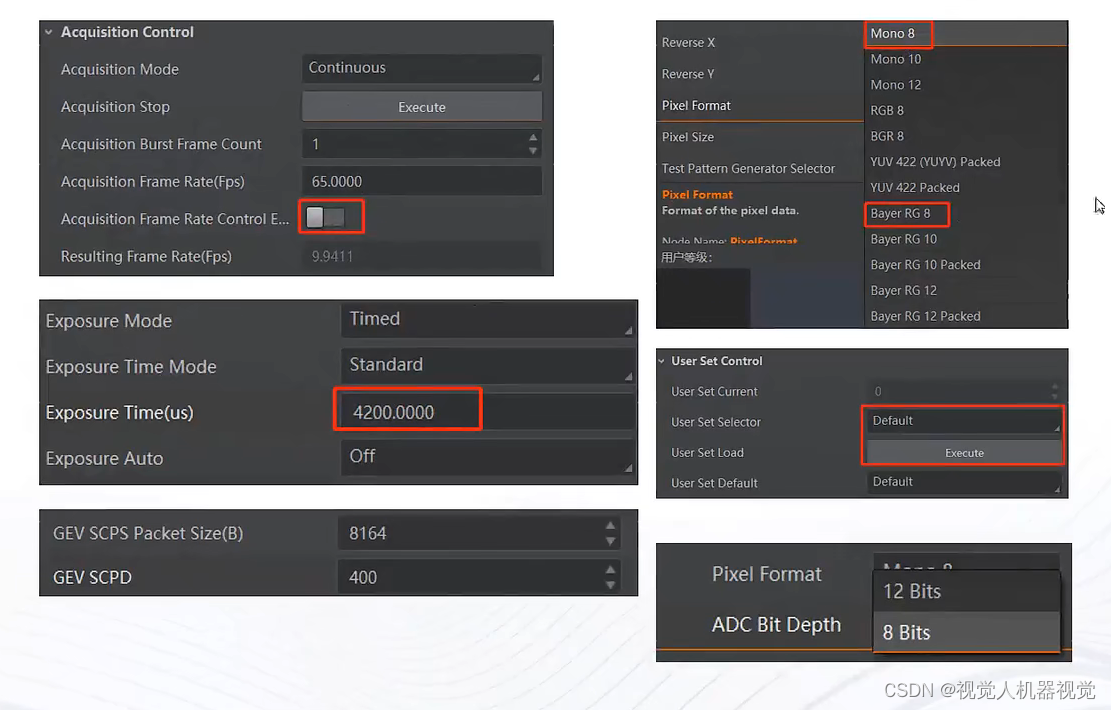
使用 OpenCV 进行立体相机深度估计 (Python/C++)代码实现
您是否想知道机器人如何在移动时自主导航、抓取不同的物体或避免碰撞?使用基于立体视觉的深度估计是此类应用的常用方法。在这篇文章中,我们讨论立体匹配和深度感知的经典方法。我们使用立体相机和 OpenCV 解释深度感知。我们分享 Python 和 C++ 代码以获取实践经验。
这篇文…
十二.镜头知识之镜头分辨率(解析力)
十二.镜头知识之镜头分辨率(解析力) 文章目录 十二.镜头知识之镜头分辨率(解析力)12.1 **分辨率与解像力的定义**12.1.0 分辨率定义12.1.1 解像力的定义12.1.2 解像力是分辨率的倒数12.1.3 Wavelength 对 物方分辨率的影响12.2 镜头分辨率跟相机分辨率如何才能匹配12.2.1 镜…
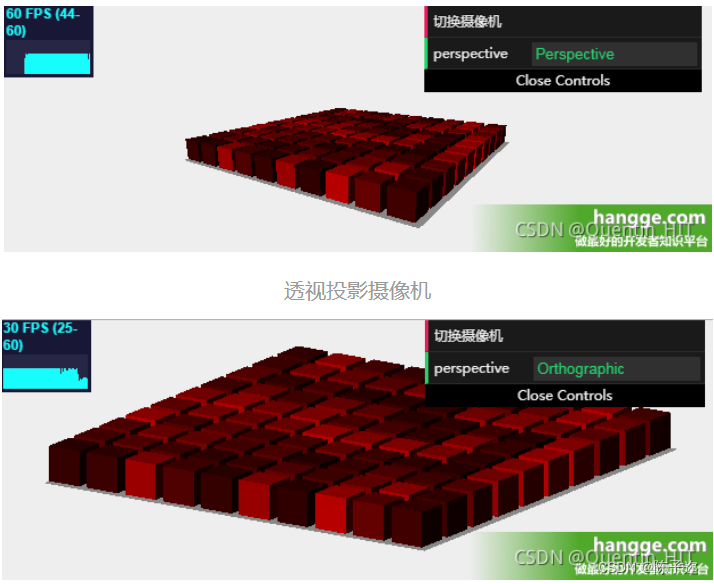
双目视觉实战--相机几何
目录 一、针孔摄像机和透镜
1. 针孔摄像机的原理
2. 近轴折射模型
3. 镜头畸变问题
二、摄像机几何
1. 数学基础
2. 相机坐标系(空间点)→像素坐标系的映射关系:
3. 规范化投影变换
4. 投影变换的性质
三、其他摄像机模型
1. 弱透视…
内存卡怎么格式化?2个方法就足够!
“我是一名摄影业余爱好者,之前的内存卡里存了很多的文件,导致容量满了。我想将内存卡格式化后继续使用,但是不知道应该如何操作,谁能给些建议吗?” 内存卡格式化是维护存储设备性能和数据安全的关键操作之一。当我们发…

记一次vue3实现TRSP大华相机拉流的经历
一、背景
业务场景,大华IP相机安装在A城市某建筑场所,工控机是内网通过4G流量卡上网,工控机通过相机采集数据后做故障识别并上传故障信息到地面服务器,地面服务器在B城市。 现需要在地面服务器提供的WEB界面上实现IP相机实时拉流…
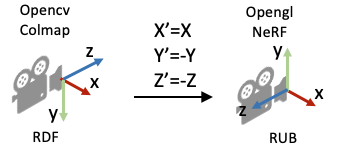
神经辐射场(NeRF)中-相机参数与坐标系变换
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis 是一篇获得ECCV2020 Best Paper Honorable Mention的论文。给定一个场景的多视角的图像,神经辐射场(NeRF)通过图像重建误差优化一个神经场景表征。优化后可以实现逼…

直击深圳安博会:4K/8K+AI+5G应用落地成风向
一、直击深圳安博会
10月25日,第十九届中国国际社会公共安全博览会在深圳福田会展中心举办。
博冠光电亮相8号馆B01展位,以“超清视觉蜕变”为主题,重点呈现3大超高清落地应用场景,揭秘4K/8K与5G、AI、红外热成像等前沿技术深入…
【Ubuntu18.04】激光雷达与相机联合标定(Livox+HIKROBOT)(一)相机内参标定
LivoxHIKROBOT联合标定——相机内参标定 引言1 海康机器人HIKROBOT SDK二次开发并封装ROS1.1 介绍1.2 安装MVS SDK1.3 封装ROS packge 2 览沃Livox SDK二次开发并封装ROS3 相机雷达联合标定——相机内参标定3.1 环境配置3.1.1 安装依赖——PCL 安装3.1.2 安装依赖——Eigen 安装…

傅里叶在图像中的应用FFT算法---fft实战应用案例
https://www.zhihu.com/question/20460630 电子衍射其实就是物质的实空间FFT变换后的倒易空间,在垂直于电子束方向的投影(因为CCD相机捕捉到的是二维平面,一般宏观物质和其倒易空间是三维的) 傅里叶变换有哪些具体的应用ÿ…
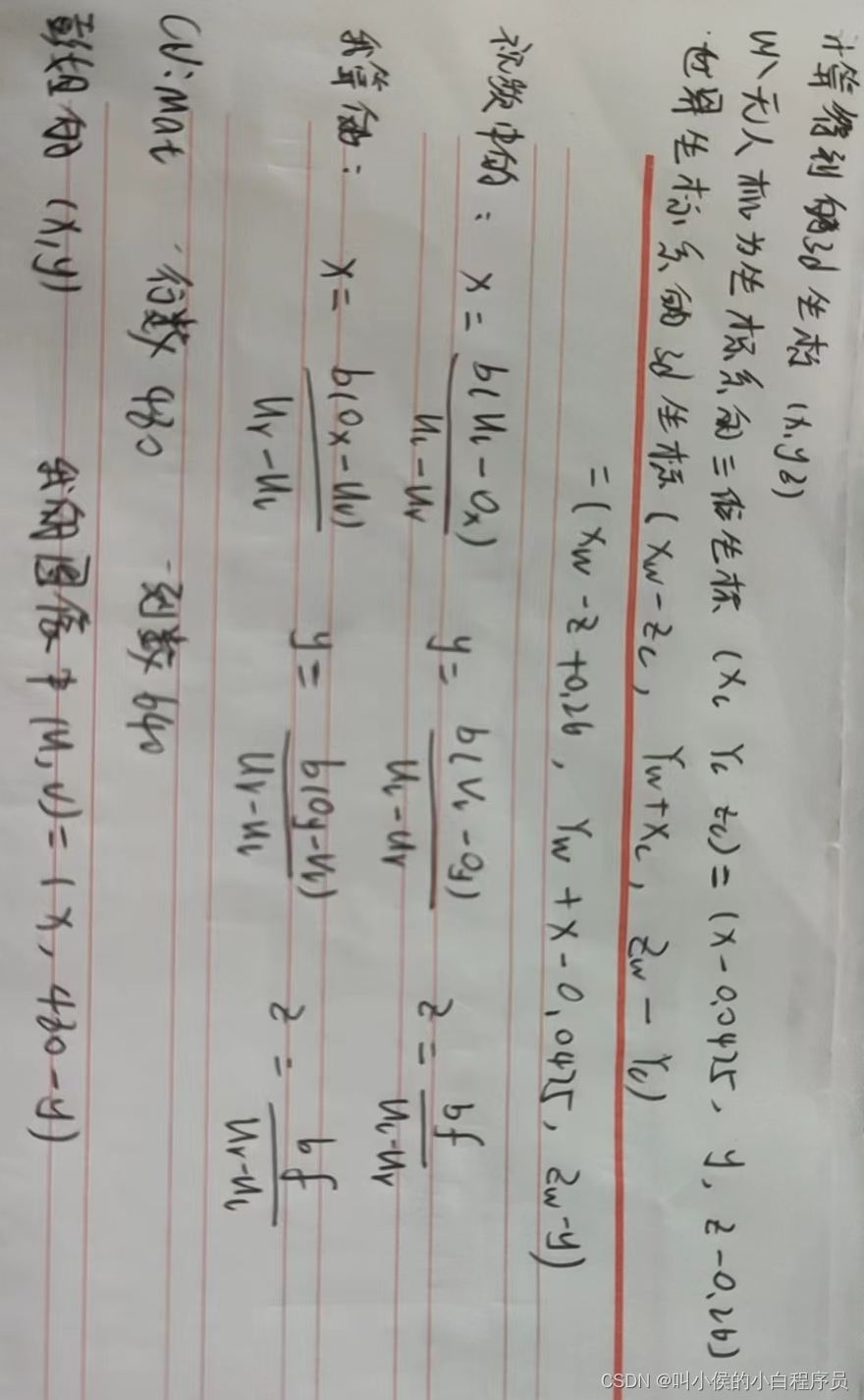
双目视觉计算三维坐标
一、原理
双目视觉的基本原理,以及公式推导,我参考的b站上的视频,链接如下:
2-线性相机模型-Linear Camera Model-Camera Calibration_哔哩哔哩_bilibilihttps://www.bilibili.com/video/BV1Q34y1n7ot/?p2&spm_id_from333.…
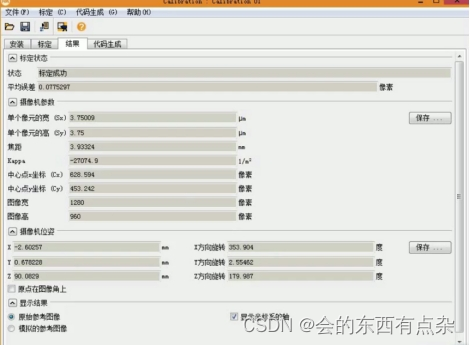
用HALCON标定助手对相机进行标定
任务要求:
已知相机镜头焦距f为8mm,相机单个CCD像素在水平和竖直两个方向上的尺寸均为3.75微米,相机为普通透光镜头和面阵相机,对相机进行标定,测量相机的内外参数。
操作步骤:
1. 在HALCON中运行gen_ca…

宣传技能培训2——《图片后期处理与制作》光影魔术师:一小时速成Lightroom图片后期软件 + 案例分析
图片后期处理与制作:从理论到实践 写在最前面背景介绍夜间拍摄及其后期捕捉瞬间更重要 深入探索Lightroom:提升图片处理效率与质量软件设置与优化图片处理与预览GPU加速导入图片到LightroomLightroom界面概览图片筛选与比较删除不需要的图片 Lightroom进…
Android Camera2开启电子防抖(EIS)和光学防抖(OIS)
刚好当前项目有录像功能,使用了第三方框架是基于Camera2引擎开发,当使用 Camera2 API 开发相机应用时,启用和关闭 EIS(电子防抖)是一个重要的功能。EIS 可以帮助减少相机拍摄时的抖动,从而提高图像和视频的…
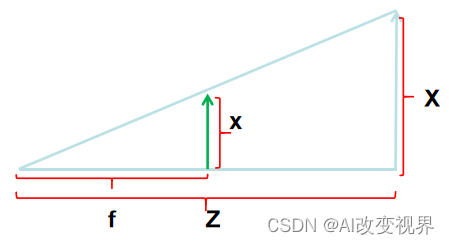
单目相机标定(原理与公式图像结合推理)
一、坐标系
相机标定涉及到坐标系的转换(世界坐标系、相机坐标系、图像坐标系、像素坐标系)。真实的物体是三维的,但是拍摄的图像是2维的,相机可以看做一个映射函数,把三维信息转换为2维(不可逆,2维不能转为3维)。
1、针孔成像原理 根据相似三角形原理,可以得到: …

单目相机标定理论及张正友标定法总结
我们的真实世界是三维的,拍摄的图片是二维的,相机起到的就是映射的过程,可以把相机看成一个广义的函数,输入的三位场景,输出是二维的图片(灰度图),一般情况下我们看到的是彩色图&…
海康visionmaster-渲染控件:渲染控件加载本地图像的方法
描述 环境:VM4.0.0 VS2015 及以上 现象:渲染控件如何显示本地图像? 解答 思路:在 2.3.1 中,可以通过绑定流程或者模块来显示图像和渲染效果。因此,第一步, 可以使用在 VM 软件平台中给图像源模…
【三维重建】对极几何
极几何描述了同一场景或者物体的两个视点图像间的几何关系 可以发现P在左右相机的投影点一定在各自的极线上,如果求出极线就能缩小求解对应点的范围。 本质矩阵对规范化摄像机拍摄的两个视点图像间的极几何关系进行代数描述
规范化相机指的是相机的内参…

线扫相机DALSA--分频倍频计算公式及原理
分频倍频计算公式及原理 推导原理: 假设编码器脉冲精度为P;同步轮/辊周长为C,Fov为视野,Res为线扫相机分辨率,N代表N倍频编码器,分频为D,倍频为M 线扫项目常规采用N(N 4࿰…
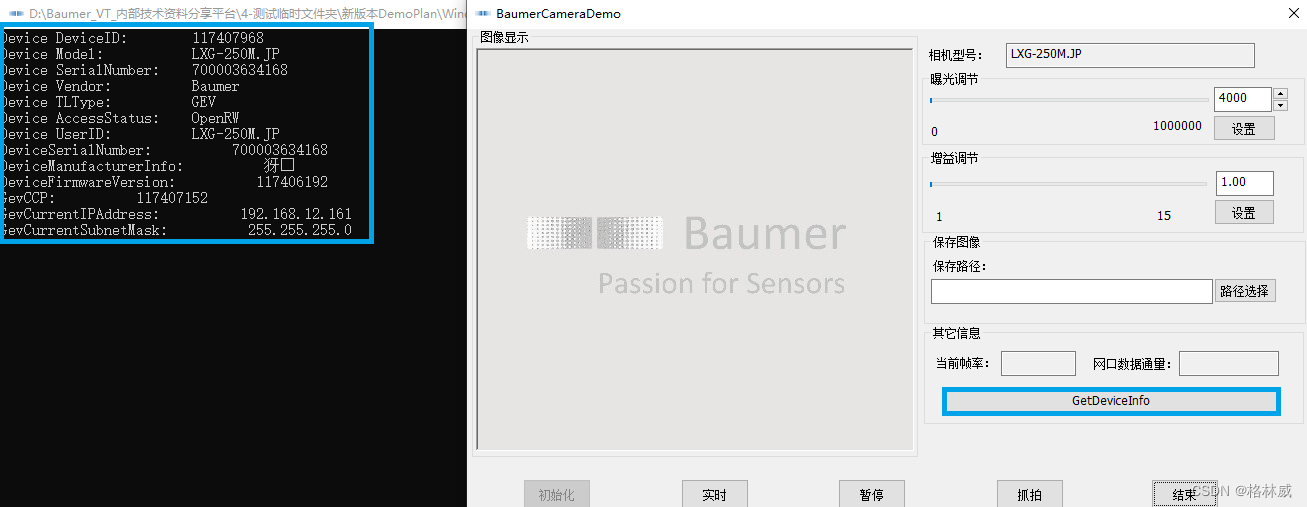
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C) Baumer工业相机Baumer工业相机通过SDK获取相关生产信息的技术背景通过SDK获取相机信息的代码分析获取Baumer工业相机相关信息Baumer工业相机相关参数信息获取的测试 Baumer…

经典文献阅读之--SST-Calib(激光雷达与相机的同步时空参数标定法)
0. 简介
借助多种输入模态的信息,基于传感器融合的算法通常优于单模态。具有互补语义和深度信息的相机和激光雷达是复杂驾驶环境中的典型传感器配置。然而,对于大多数相机和激光雷达融合的算法,传感器的标定将极大地影响性能。具体来说&…

讲座 | 颠覆传统摄像方式乃至计算机视觉的“脉冲视觉”
传统相机拍摄视频时其实是以一定帧率进行采样,视频其实还是一串图片的集合,因此低帧率时会觉得视频卡,拍摄高速运动物体时会有运动模糊等等问题。然而你能想象这一切都可以被“脉冲视觉”这一前沿技术改变吗? 今天下午听了北京大学…
【文献分享】基于线特征的激光雷达和相机外参自动标定
论文题目:Line-based Automatic Extrinsic Calibration of LiDAR and Camera
中文题目:基于线特征的激光雷达和相机外参自动标定
作者:Xinyu Zhang, Shifan Zhu, Shichun Guo, Jun Li, and Huaping Liu
作者机构:清华大学汽车安…

机器视觉工程师们,人的命运大多数连在一起
看着鱼池里的小鱼,很是治愈。自己的往后的生活还要继续。
有次出差,和工作经验13年机器视觉工程师,他用手指着流水线上的操作工说,他们失业,去干什么,回家种田吗?都机械化种田,回家…
ROS自学笔记二十七:导航中相机消息
深度相机相关消息有:sensor_msgs/Image、sensor_msgs/CompressedImage、sensor_msgs/PointCloud2
sensor_msgs/Image 对应的一般的图像数据,sensor_msgs/CompressedImage 对应压缩后的图像数据,sensor_msgs/PointCloud2 对应的是点云数据(带有深度信息的…

自学SLAM(6)相机与图像实践:OpenCV处理图像与图像拼接(点云)
前言
如果写过SLAM14讲第一次的作业,或者看过我之前的运行ORB_SLAM2教程应该都安装过OpenCV了,如果没有安装,没关系,可以看我之前的博客,里面有如何安装OpenCV。 链接: 运行ORB-SLAM2(含OpenCV的安装&…
4.2 SSAO算法 屏幕空间环境光遮蔽
一、SSAO介绍
AO
环境光遮蔽,全程Ambient Occlustion,是计算机图形学中的一种着色和渲染技术,模拟光线到达物体能力的粗略的全局方法,描述光线到达物体表面的能力。 SSAO
屏幕空间环境光遮蔽,全程 Screen Space Amb…
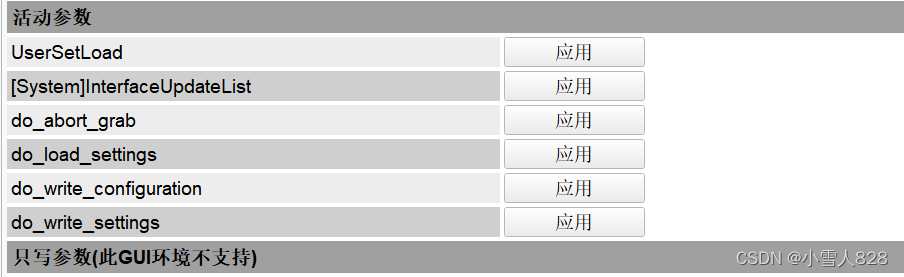
大恒相机在halcon里面的可读可写参数和只读参数
查询图像采集设备具体参数的算子
get_framegrabber_param (AcqHandle, available_param_names, AvailableParamNames)这块可以显示可见级别,以下是开始值的级别。 U3相机
可读可写 只读参数 活动参数 网口相机 只读参数 活动参数
华山编程培训中心——工业相机飞拍
飞拍功能是一种高速运动图像采集技术,通过降低相机的曝光时间来拍摄快速移动的对象,以提高工作效率和加快生产速度。下面视频演示工业相机飞拍: 上位机控制工业相机飞拍演示 一. 飞拍对相机硬件的要求
全局快门相机:飞拍要求相机…
提示3D标题编辑器仍在运行怎么解决,以及3D标题编辑器怎么使用
在进行视频剪辑时,尤其是剪辑一些带有文字的开场视频,一般都会使用具有立体效果的3D标题,这样制作出来的视频效果不仅好看,还非常的炫酷,但是对于一些刚刚开始接触视频剪辑的小伙伴来说,可能对3D标题还不是…
outlook是什么软件outlook邮箱撤回邮件方法
Outlook是微软公司开发的一款邮件客户端,也是Office办公套件的一部分。它可以与多个电子邮件服务提供商(如Outlook.com、Exchange、Gmail等)集成,用户可以使用Outlook来发送、接收和管理电子邮件、日历、联系人、任务等信息。本篇…
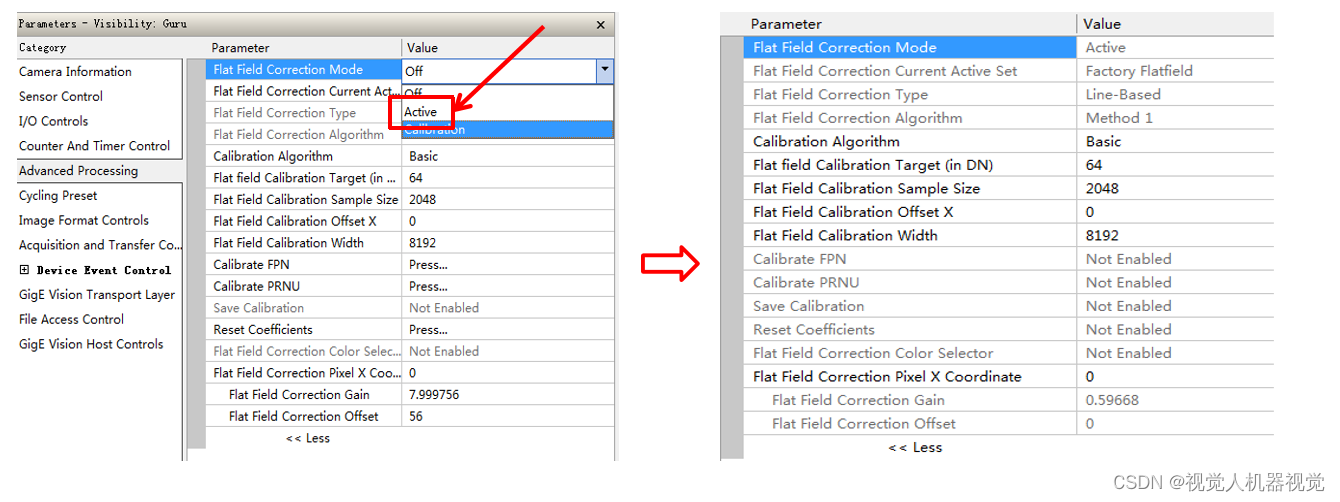
线扫相机-TEK(埃科)相机平场矫正详细步骤
采集卡模式: 现场要求 (1) 采集卡连续采集相机图像,并正常显示。 (2) 光源控制在正常工作亮度,使画面亮度不要过低也不要饱和。 (3) 调整相机使画面偏离成像位置,形成虚焦。 (4) 相机拍摄物面使用白纸,调节曝光时间使整…
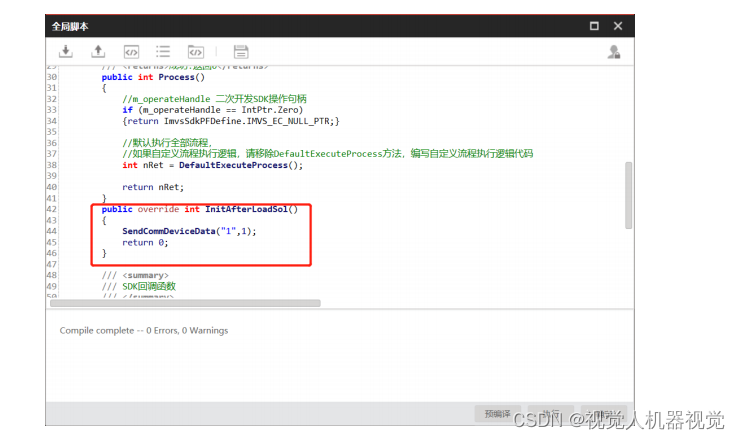
海康Visionmaster-全局脚本:方案加载完成信号发给通 信设备的方法
需要在方案加载完成后,发送加载完成信号到全局变量,发送给通信设备。 全局脚本的使用可以通过打开示例,完成常用的基本功能开发。 打开全局通信代码后,在脚本中添加代码
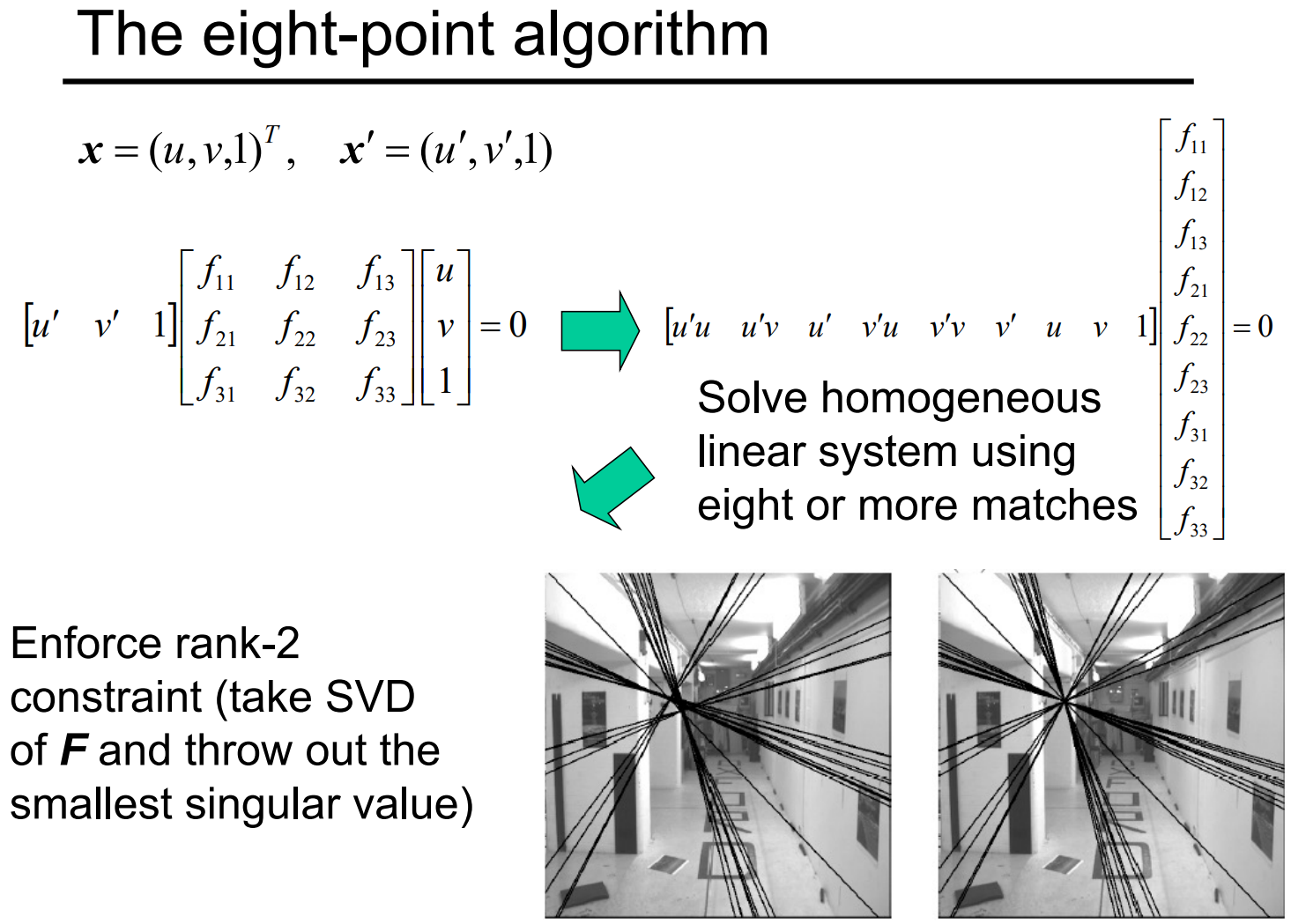
【计算机视觉】对极几何
文章目录 一、极线约束(Epipolar Constraint)二、相机标定过的情况三、相机没有标定过的情况四、八点算法(eight-point algorithm) 我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。
在上一…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机本身的数据保存(CustomData)功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机本身的数据保存(CustomData)功能(C) Baumer工业相机Baumer工业相机的数据保存(CustomData)功能的技术背景CameraExplorer如何使用图像剪切࿰…

提示3D标题编辑器仍在运行如何解决 3D标题编辑器怎么使用
品牌型号:联想GeekPro 2020
系统:Windows 10 64位专业版
软件版本:会声会影2023旗舰版
3D标题因其独特的表现形式和多变的画面效果,被广泛应用于节目片头、宣传片、开幕式等诸多场景之中。掌握3D标题的使用技巧,能够…
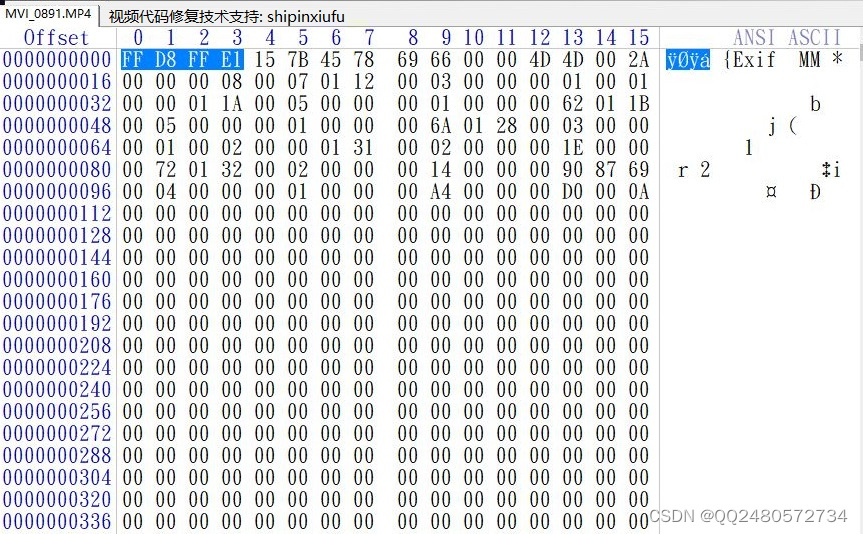
相机删除视频恢复后损坏打不开修复方法
同事对热恋5年的女朋友精心准备了一场浪漫求婚仪式,让朋友帮忙用单反相机拍摄记录这一美好时刻。不巧的的是朋友清理相机空间时,不小心把这一视频删除了,找人帮忙把视频恢复了,却无奈发现恢复出来的视频播放不了,真是好…
相机存储卡被格式化了怎么恢复?数据恢复办法分享!
随着时代的发展,相机被越来越多的用户所使用,这也意味着更多的用户面临着相机数据丢失的问题,很多用户在使用相机的过程中,都出现过不小心格式化相机存储卡的情况,里面的数据也将一并消失,相机存储卡被格式…
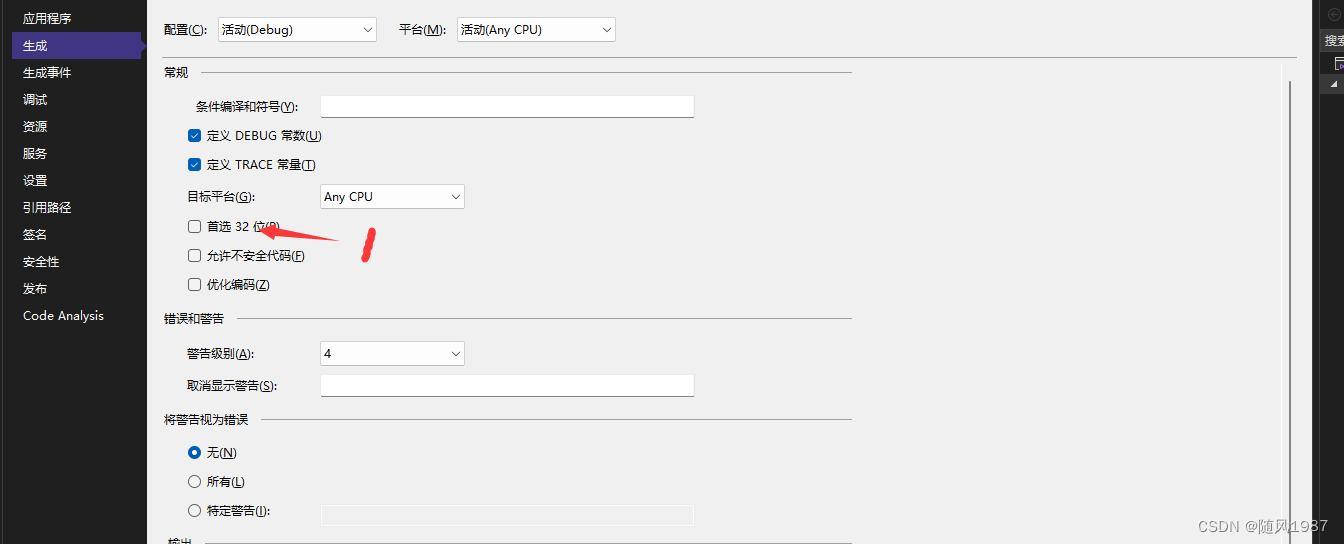
vp与vs联合开发-通过CogAcqFifoTool工具连接相机
1.完成相机硬件配置后
2.完成vp与vs联合开发配置功能后
1.创建winform 项目 目的 : 搭建 界面应用 2. 1. vpp文件存入 项目的debug 目录中 目的: 在项目中加载本地vpp文件 读取相机工具 1.控件CogRecordDisplay 用于显示相机拍摄照片和实施显示的窗口
2和3 …
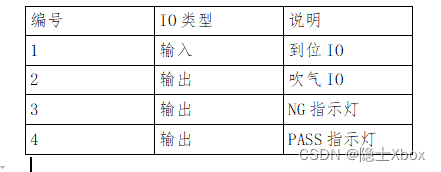
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C++)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C) Baumer工业相机Baumer工业相机使用OpenCV对图像进行边缘检测的技术背景在NEOAPI SDK里使用OpenCV建立边缘检测功能在NEOAPI SDK里使用边缘检测功能对图像进行…
图像相机-相机属性SDK汇总设置
文章目录 彩色相机设置彩色分辨率设置(TY_ENUM_IMAGE_MODE)彩色模拟增益(TY_INT_ANALOG_GAIN)彩色曝光(TY_INT_EXPOSURE_TIME)彩色增益彩色畸变 深度相机设置深度分辨率(TY_ENUM_IMAGE_MODE&…
Web相机和浏览器的二维码扫描方案
Web相机和适用于浏览器的二维码扫描方案
qr-camera
在线体验 | English
功能
支持浏览器扫描二维码支持拍照支持录像功能支持二维码解析和生成
quickstart
npm i qr-cameraimport {QRCamera} from qr-camera;function main(){const camera new QRCamera();document.body…
【标定】利用iphone基于python与opencv对手机相机做标定
利用iphone基于python与opencv对手机相机做标定 1. 标定步骤2. 标定代码3. 标定结果 之前基于ros实现了网络摄像机的标定,详细见
1. 标定步骤
(1)打印一张棋盘格A4纸张(黑白间距已知),并贴在一个平板上。…
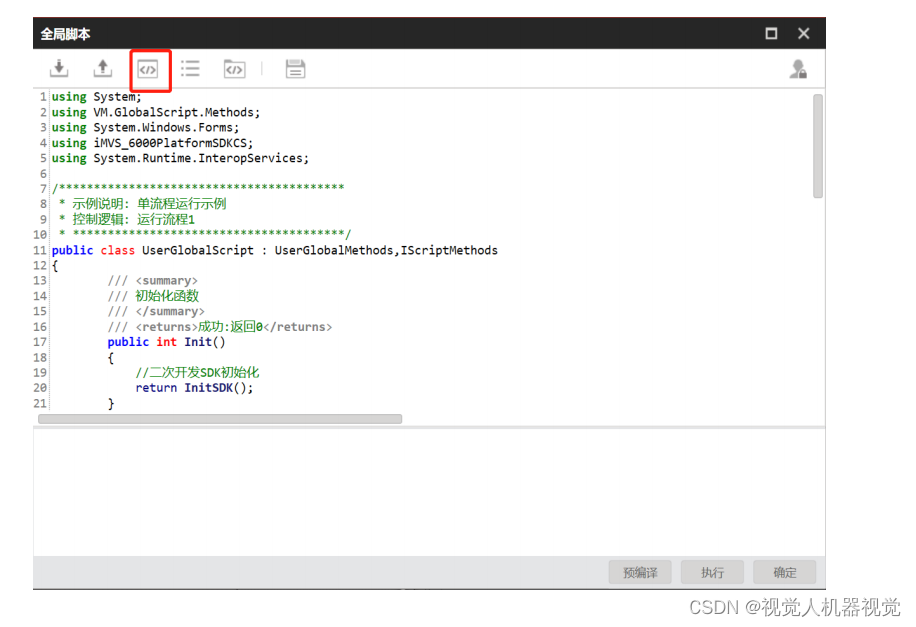
海康Visionmaster-全局脚本:通过全局脚本加载本地图像的方法
通过 VM 的全局脚本加载本地图像的步骤如下所示: 1、打开全局脚本,选择需要的示例 2、在运行函数中插入如下代码
1. public int Process()
2. {
3. //m_operateHandle 二次开发 SDK 操作句柄
4. if (m_operateHandle IntPtr.Zero)
5. { return ImvsSd…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C#) Baumer工业相机Baumer工业相机的掉线自动重连的技术背景通过PnP事件函数检查Baumer工业相机是否掉线在NEOAPI SDK里实现相机掉线重连方法:工业相机掉线重连测试演示图…
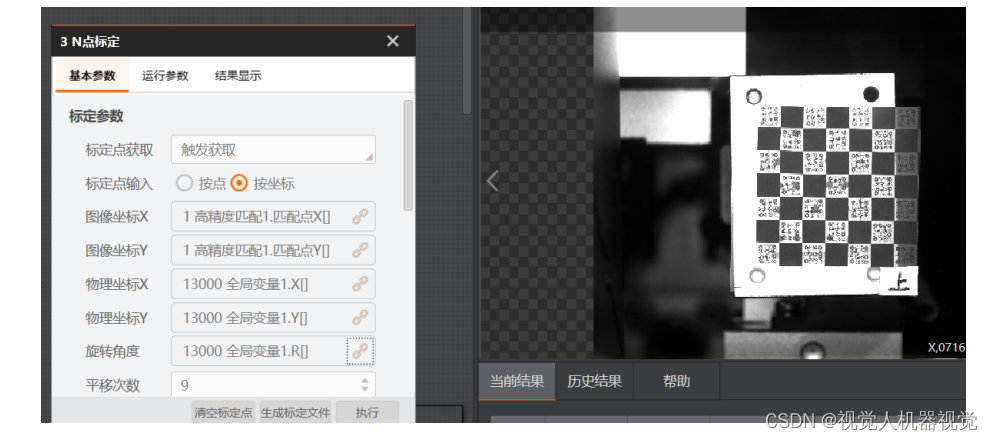
海康Visionmaster-全局脚本:通过全局脚本获取通讯输 入的参数并赋值给全局变量
全局脚本根据外部通讯输入的数值赋值给全局变量,实现输入与全局变量之间的数值绑定。(一般应用于定位、标定等需要外界物理值的场景)。 第一步,在 vm 通讯管理中设置好通讯设备,连接 第二步,根据通讯设备、接收的信息…
机器视觉在虚拟现实与增强现实中的作用
机器视觉在虚拟现实(VR)和增强现实(AR)中发挥着至关重要的作用。这些技术的核心是计算机视觉领域,重点是让计算机具有“看到”和理解周围世界的能力。
在虚拟现实中,计算机视觉用于创建和处理用户所见的虚…
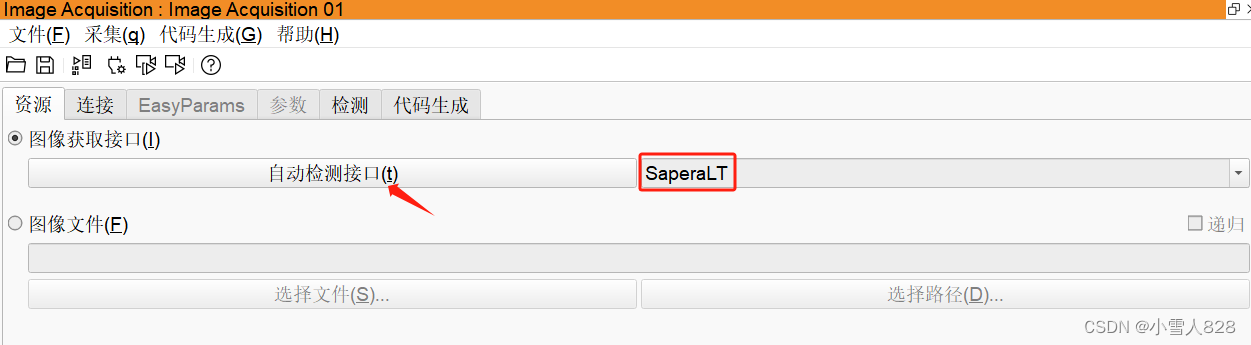
Halcon如何使用SaperaLT库连接dalsa相机
halcon安装好的时候,没有带SaperaLT的采集库,需要额外在Halcon官网下载此库。
以下是halcon官网下载此库的链接。官网需要注册才可以下载。
https://www.mvtec.com/downloads/interfaces?tx_mvtecproduct_extensiondownloadlist%5Bfilter%5D%5B0%5Dma…
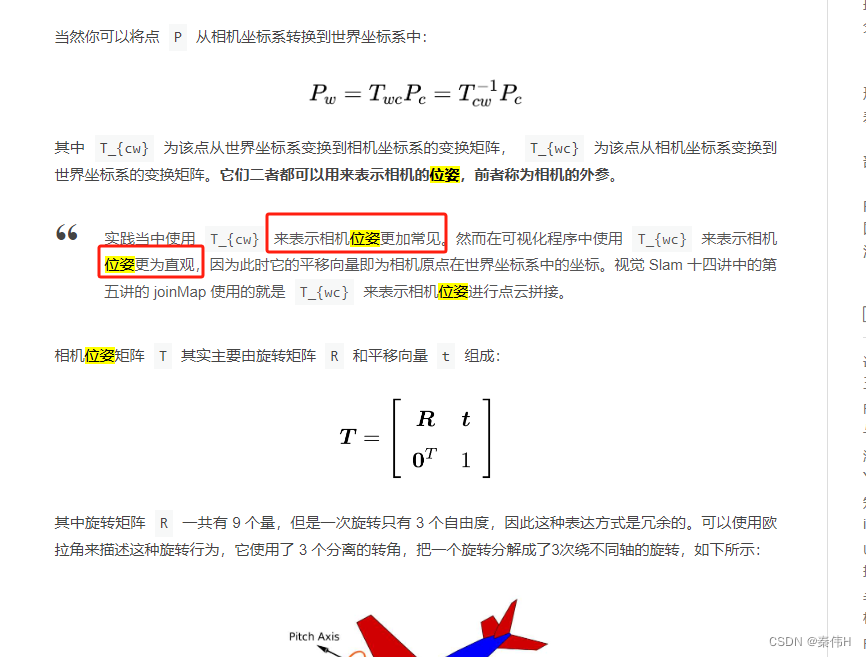
SLAM中提到的相机位姿到底指什么?
不小心又绕进去了,所以掰一下。 以我个人最直观的理解,假设无旋转,相机在世界坐标系的(5,0,0)^T的位置上,所谓“位姿”,应该反映相机的位置,所以相机位姿应该如下: Eigen::Matrix4d T Eigen::M…
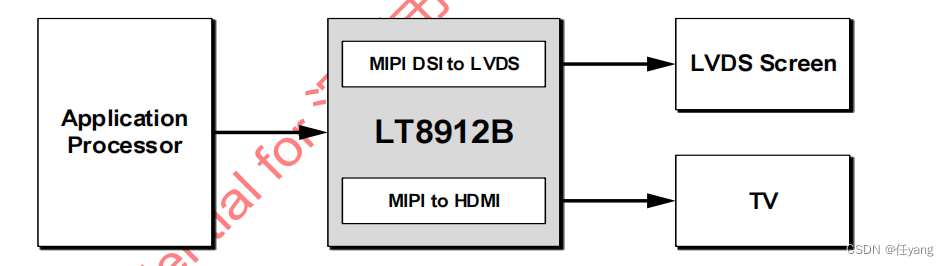
龙迅LT8912B 单通道MIPIDSI桥接LVDS+HDMI(1.4)同显点屏LVDS,加环出一路HDMI
龙迅LT8912B
描述:
Lontium LT8912B MIPIDSI到LVDS和HDMI桥采用单通道MIPID-PHY接收器前端配置,每个通道有4个数据通道,每个数据通道运行1.5Gbps,最大输入带宽可达6Gbps。对于屏幕应用,该桥解码MIPIDSI 18bpp RGB666和24bpp RGB…
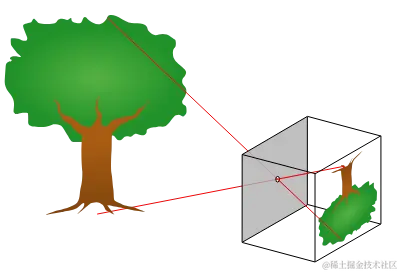
Three.js相机模拟
有没有想过如何在 3D Web 应用程序中模拟物理相机? 在这篇博文中,我将向你展示如何使用 Three.js和 OpenCV 来完成此操作。 我们将从模拟针孔相机模型开始,然后添加真实的镜头畸变。 具体来说,我们将仔细研究 OpenCV 的两个失真模型,并使用后处理着色器复制它们。
拥有逼…
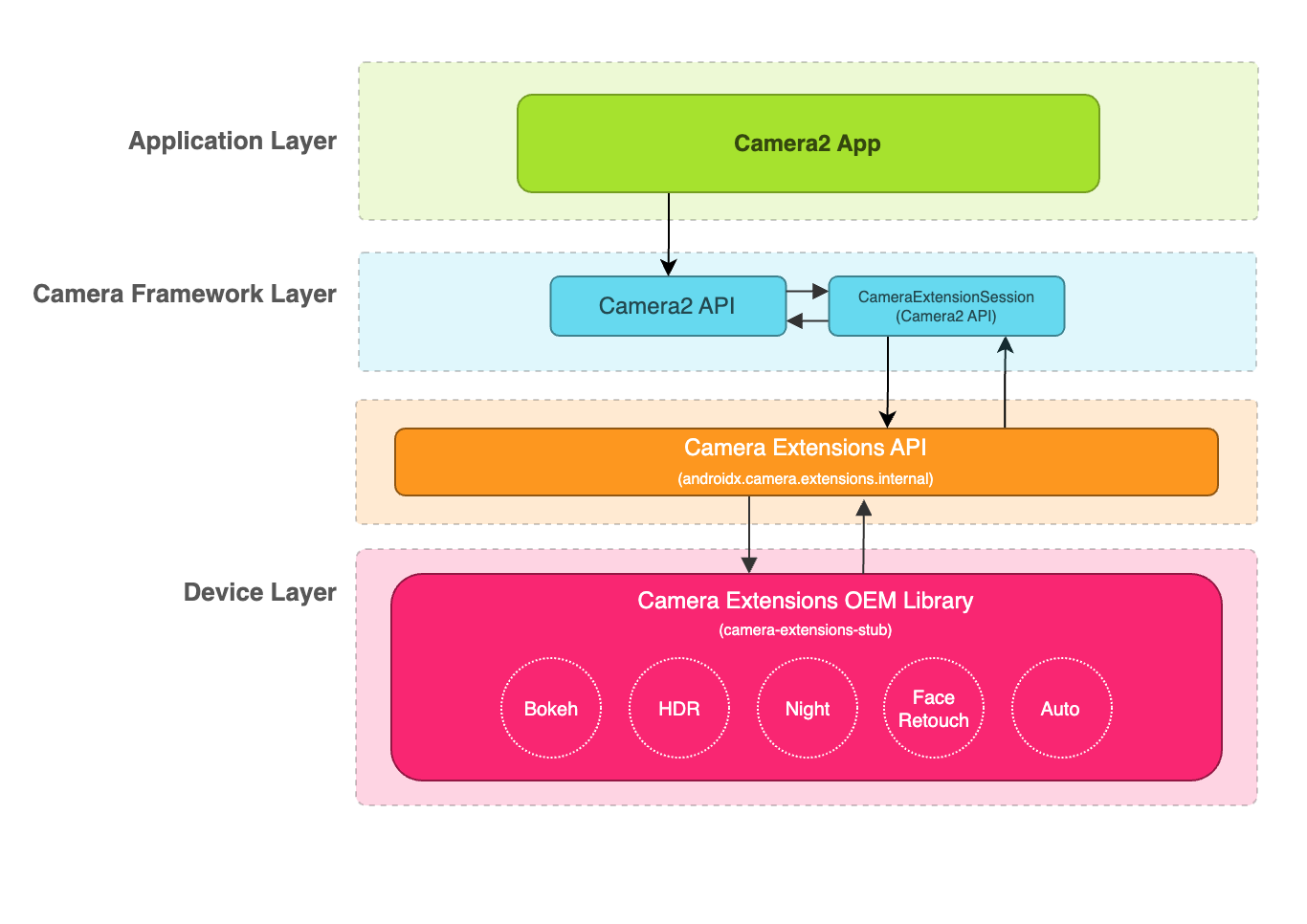
Android相机性能提高50%
文章目录 应用举例(可以不看这一part,直接跳过看具体怎么做):Snapchat 通过 Camera2 Extensions API 将新相机功能的集成速度提高了 50%**Camera2 扩展 API 可以访问高级功能更多设备上的更多机会 正文:开始使用扩展架…

无人机红外相机的畸变矫正
在项目开展过程中,发现大疆M30T的红外相机存在比较明显的畸变问题,因此需要对红外图像进行畸变矫正。在资料检索过程中,发现对红外无人机影像矫正的资料较少,对此,我从相机的成像原理角度出发,探索出一种效…

99、NeRF ray space
CG相机模型
在图形学中最常用的相机模型的原理和小孔成像是类似的。 不同之处在于,如上图,小孔成像得到的图像是倒立的,但是我们希望得到的图像是正向的,因此,我们选择小孔前成像。 从 3D 到 2D 的投影,…
[2]相机标定、与机器人手眼标定
抓取实验平台硬件包含:深度相机、计算机、机械臂、置物台
标定过程涉及四个坐标系:世界坐标系、图像像素坐标系、图像物理坐标系、相机坐标系。
相机内参:从相机坐标系到图像坐标系相机外参:从世界坐标坐标系到相机坐标系
相机…
基于机器视觉工业相机的Raw图像和Bitmap图像的保存和转换(C#代码,UI界面版)
基于机器视觉工业相机的Raw图像和Bitmap图像的保存和转换(C#代码,UI界面版) 工业相机图像格式工业相机实现Raw图像和Bitmap图像的保存和转换的技术背景在相机SDK中获取图像转换图像的代码分析工业相机回调函数里保存Bitmap图像数据工业相机图…
相机专业模型详解,各个参数作用,专业模式英文全称和缩写
ISO(感光度) 全称: International Organization for Standardization缩写: ISO Shutter Speed(快门速度) 全称: Shutter Speed缩写: SS Aperture(光圈大小) 全…
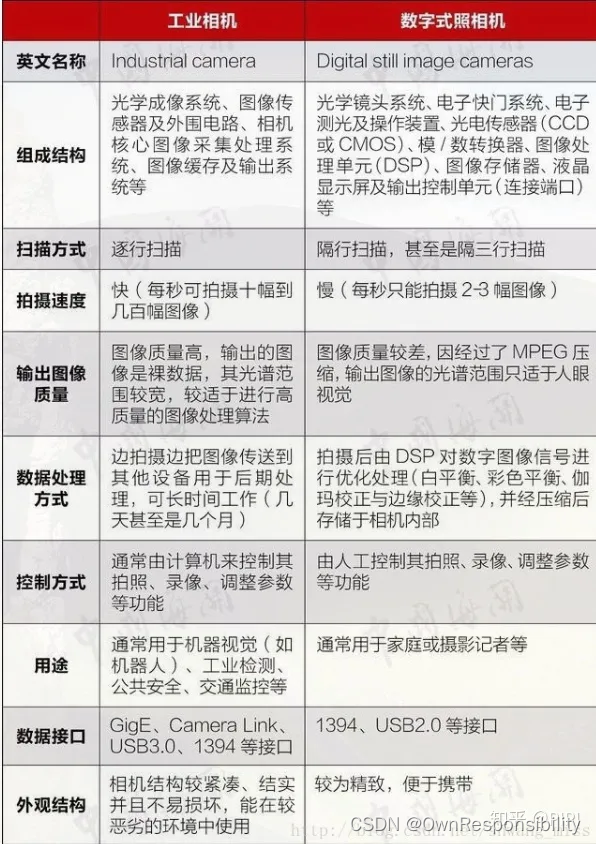
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C) Baumer工业相机Baumer工业相机的帧率的技术背景Baumer工业相机的帧率获取方式CameraExplorer如何查看相机帧率信息在NEOAPI SDK里通过函数获取相机帧率(C) …
OpenCV+相机校准和3D重建
相机校准至少需要10个测试图案,所需的重要输入数据是3D现实世界点集以及图像中这些点的相应2D坐标。3D点称为对象点,而2D图像点称为图像点。
准备工作
除了棋盘,我们还可以使用圆形网格。 在这种情况下,我们必须使用函数cv.find…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…

小米14系列:跨越升级,为你万象更新
10月26日,小米召开小米澎湃OS暨小米14系列新品发布会,发布了年度旗舰小米14系列。 承袭徕卡专业光学设计,搭载新一代 Summilux 镜头,以非凡影像力,瞬间猎获真实光影。全等深微曲屏,突破传统形态限制&#x…
如何解决3d max渲染效果图全白这类异常问题?
通过3d max渲染效果图时,经常会出现3Dmax渲染效果图全黑或是3Dmax渲染效果图全白这类异常问题。可能遇到这类问题较多的都是新手朋友。不知如何解决。 3dmax渲染出现异常的问题,该如何高效解决呢?今天小编这里整理几项知识点,大家…
目标检测YOLO系列从入门到精通技术详解100篇-【目标检测】机器视觉(基础篇)(三)
目录
前言
几个高频面试题目
如何解决机器视觉稳定性差的问题?
知识储备
机器视觉基础知识点
阿秒脉冲

【目标跟踪】多相机多目标跟踪
文章目录 前言一、计算思路二、代码三、结果 前言
单相机目标跟踪之前博客已经有过基本介绍,本篇博客主要介绍一种多相机目标跟踪的计算方法已知各相机内外参,如何计算共视区域像素投影?废话不多说,见下图。
同一时刻相机A与相机…
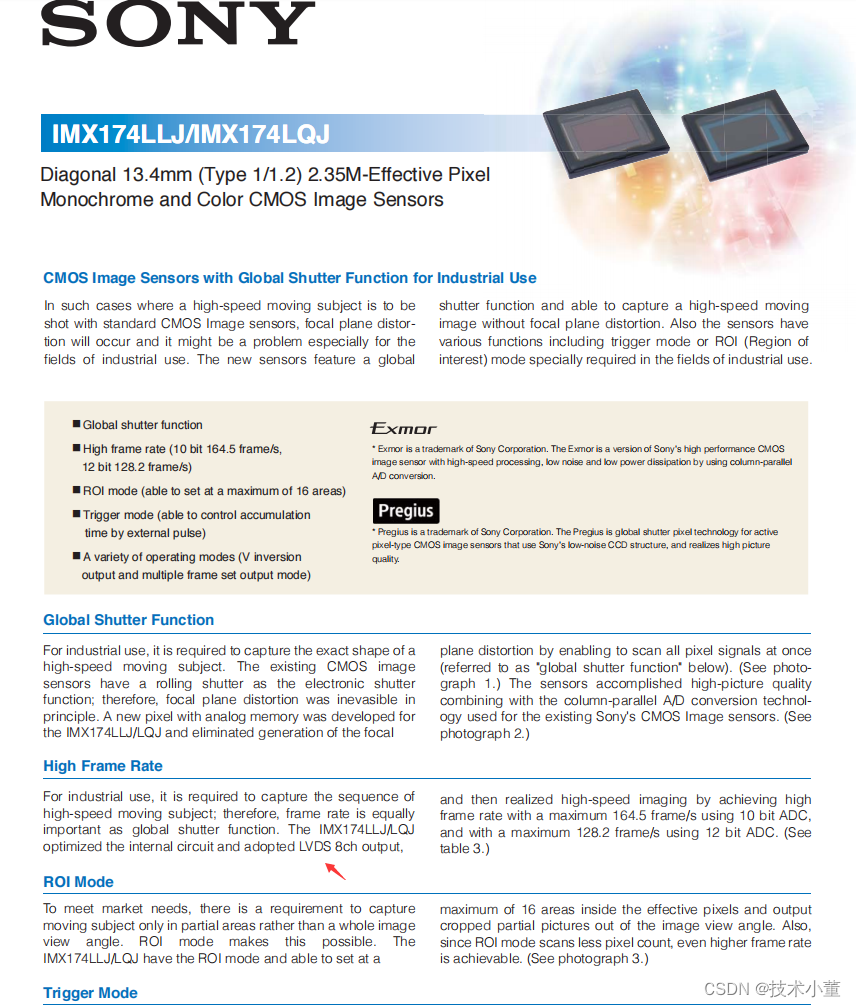
008-关于FPGA/ZYNQ直接处理图像传感器数据输出的若干笔记(裸板采集思路)
文章目录 前言一、图像传感器厂商二、图像传感器的参数解析三、图像传感器中的全局曝光和卷帘曝光四、处理传感器图像数据流程1.研究当前图像传感器输出格式2.FPGA处理图像数据 总结 前言
最近也是未来需要考虑做的一件事情是,如何通过FPGA/ZYNQ去做显微镜图像观测…
【unity小技巧】FPS游戏实现相机的偏移震动、武器射击后退和后坐力效果
最终效果 文章目录 最终效果前言相机偏移震动相机震动脚本换弹节点震动 武器射击后退效果武器后坐力效果完结 前言
关于后坐力之前其实已经分享了一个:FPS游戏后坐力制作思路 但是实现起来比较复杂,如果你只是想要简单的实现,可以看看这个&…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机的高速图像保存(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机的高速图像保存(C#)) Baumer工业相机Baumer工业相机的图像高速保存的技术背景Baumer工业相机通过NEOAPI SDK函数图像高速保存在NEOAPI SDK里实现线程高速图像保存:工业相机高…
使用激光雷达(LiDAR)和相机进行3D物体跟踪
使用相机和激光雷达进行时间到碰撞(TTC)计算 在我的先前文章中,我介绍了通过检测关键点和匹配描述符进行2D特征跟踪的主题。在本文中,我将利用这些文章中的概念,以及更多的内容,开发一个软件流水线…

大师学SwiftUI第18章Part2 - 存储图片和自定义相机
存储图片
在前面的示例中,我们在屏幕上展示了图片,但也可以将其存储到文件或数据库中。另外有时使用相机将照片存储到设备的相册薄里会很有用,这样可供其它应用访问。UIKit框架提供了如下两个保存图片和视频的函数。
UIImageWriteToSavedPh…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用短曝光功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用短曝光功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和短曝光功能的技术背景Baumer工业相机通过NEOAPI SDK使用短曝光功能1.引用合适的类文件2.通过NEOAPI SDK使用短曝光功能3.通过NEOAPI SDK关闭短…
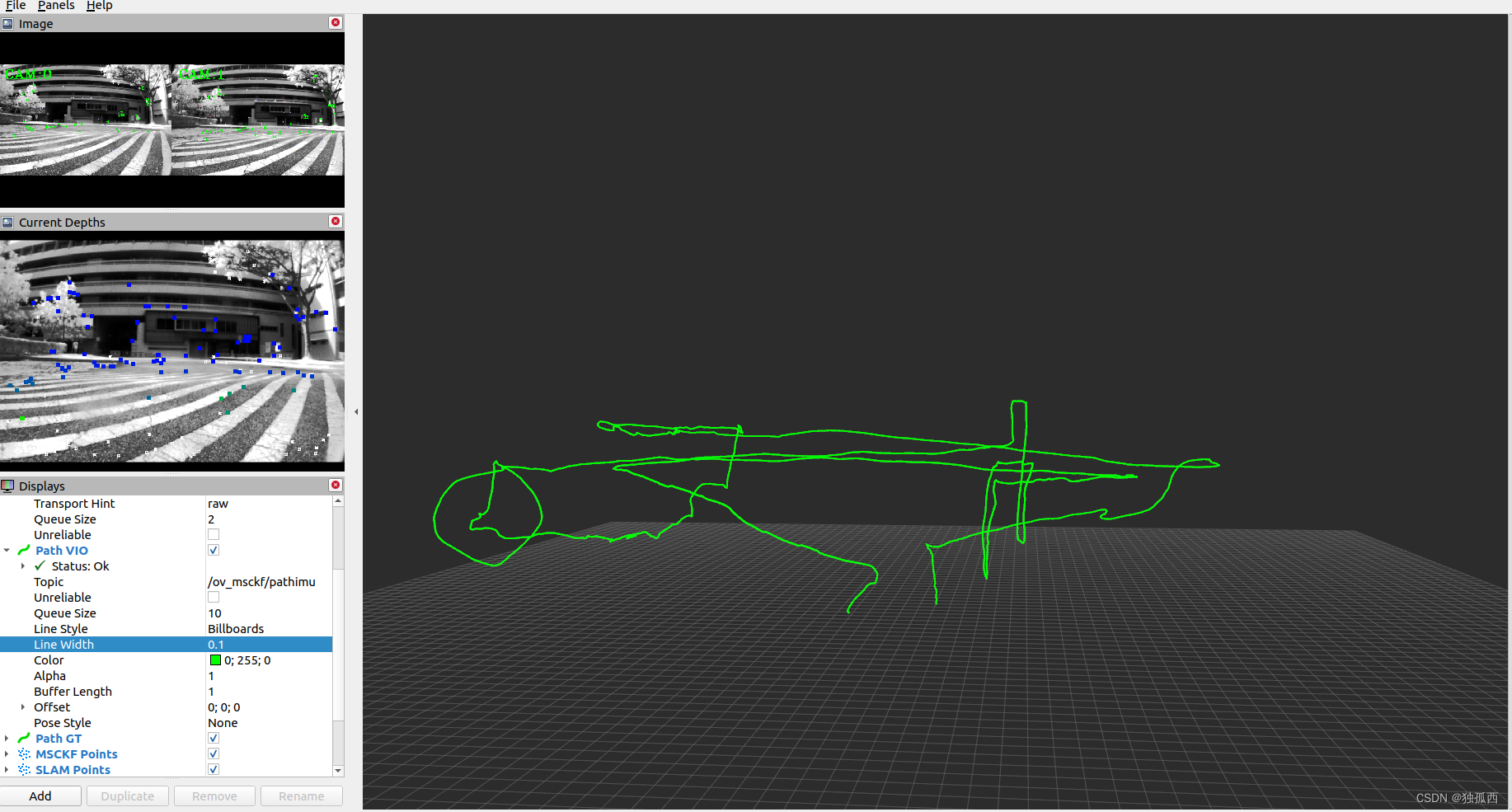
OpenVINS学习2——VIRAL数据集eee01.bag运行
前言
周末休息了两天,接着做上周五那个VIRAL数据集没有运行成功的工作。现在的最新OpenVINS需要重新写配置文件,不像之前那样都写在launch里,因此需要根据数据集情况配置好estimator_config.yaml还有两个标定参数文件。
VIRAL数据集
VIRAL…
RK3568/RV1126/RV1109/RV1106 ISP调试方案
最近一直在做瑞芯微rv1126的开发,由于项目性质,与camera打的交道比较多,包括图像的采集,ISP处理,图像处理,H.264/H.265编解码等各个方面吧。学到了不少,在学习的过程中,也得到了不少…
Vue3+Three.js星空球体
结果图 threejs比例不变自适应
首先是设置相机和render,要注意的就是相机要加上aspect不然如果页面不是正方形看到的样式就会失调。
// ---------相机设置-------------
// 实例化一个透视投影相机对象
const camera new THREE.PerspectiveCamera();
//相机在Thr…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为Mat图像格式(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里实现相机图像转换为Mat图像格式联合OpenCV实现相机图像转换为Mat图像格式测试演示图 工业相机…
![[每周一更]-(第33期):相机的基本知识](https://img-blog.csdnimg.cn/direct/3eb68ae8c5d042cbb1fcd48b04fdb24e.jpeg#pic_center)
[每周一更]-(第33期):相机的基本知识
一、自用设备和基础知识
1855原厂镜头,半幅镜头,等效焦距:28mm,普通广角;滤镜直径:58mmEF-S 18-200mm ISEF 50mm f/1.8 STM
(1)设备:单反相机 佳能 850D
相机参数&…
Ubuntu 20.04 Intel RealSense D435i 相机标定教程
下载编译code_utils
mkdir -p ~/imu_catkin_ws/src
cd ~/imu_catkin_ws/src
catkin_init_workspace
source ~/imu_catkin_ws/devel/setup.bash
git clone https://github.com/gaowenliang/code_utils.git
cd ..
catkin_make报错:sumpixel_test.cpp:2:10: fatal err…

DCCK“启航计划“3+2第一课机器视觉导论
用相机代替人眼去获取图像,然后处理图像,给出指令。 如:相机获取可口可乐的液面高度图片,通过连接线床给图像处理程序,程序给出合格不合格的判断再执行后续操作 作用:机器不会疲劳,机器判断标准…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机图像转换由Mono10转换为Mono8(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机图像转换由Mono10转换为Mono8(C#) Baumer工业相机Baumer工业相机的Mono10转换为Mono8图的技术背景在NEOAPI SDK里实现相机图像由Mono10转换为Mono8格式 工业相机通过NEOAPI SDK实现相机图像转换的优…
DeepStream系列之rtmpsink功能,rtsp转rtmp,opencv读取rtsp图像处理后推流rtmp
了解到一个更好的流媒体开源项目,是中国人写的,项目地址 https://github.com/ossrs/srs,有兴趣的可以尝试下,实时性更快 DeepStream系列之rtmpsink功能
实时性没要求,可以用下面的opencv opencv读取rtsp图像处理后推流…
VUE2+THREE.JS 按照行动轨迹移动人物模型并相机视角跟随人物
按照行动轨迹移动人物模型并相机视角跟随人物 1. 初始化加载模型2. 开始移动模型3. 人物模型启动4. 暂停模型移动5. 重置模型位置6. 切换区域动画7. 摄像机追踪模型8. 移动模型位置9.动画执行 人物按照上一篇博客所设定的关键点位置,匀速移动 1. 初始化加载模型
//…
微信小程序:chooseimage从本地相册选择图片或使用相机拍照
文档 https://uniapp.dcloud.net.cn/api/media/image.html#chooseimage https://developers.weixin.qq.com/miniprogram/dev/api/media/image/wx.chooseImage.html
代码示例
const res await uni.chooseImage({count: 1, //默认9sizeType: [original, compressed], //可以…
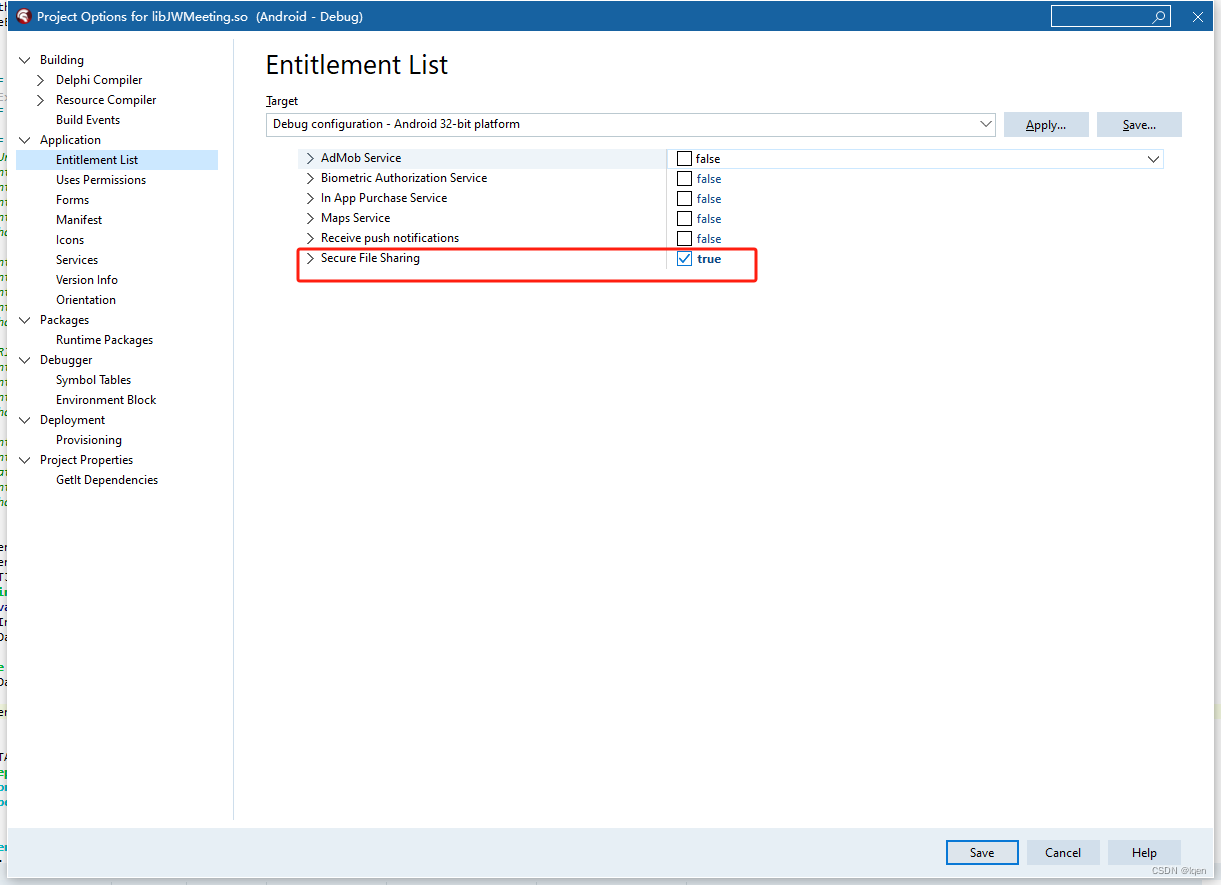
delphi android打开外部文件,报错android.os.FileUriExposedException解决方法
Android 7.0强制启用了被称作 StrictMode的策略,带来的影响就是你的App对外无法暴露file://类型的URI了。
如果你使用Intent携带这样的URI去打开外部App(比如:打开系统相机拍照),那么会抛出FileUriExposedException异常。
Delphi 为Android…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现Mono12和Mono16位深度的图像保存(C++)
Baumer工业相机堡盟工业相机如何联合BGAPI SDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#) Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:NEOAPI SDK联合OpenCV进行图…
UV胶水能够粘接聚碳酸酯PC吗?粘接又要注意哪些细节呢?
聚碳酸酯PC是一种高性能工程塑料,透明、坚固和耐高温。常用于制造透明零件、光学设备、以及一些耐热和强度要求较高的应用,如:汽车零件、眼镜镜片、电子设备外壳等。 聚碳酸酯PC的化学性质是一种非极性材料,因此对于大多数胶水来说…
带有 RaspiCam 的 Raspberry Pi 监控和延时摄影摄像机
一、说明 一段时间以来,我一直想构建一个运动激活且具有延时功能的树莓派相机,但从未真正找到我喜欢的案例。我在thingiverse上找到了这个适合树莓派和相机的好案例。它是为特定的鱼眼相机设计的,但从模型来看,我拥有的廉价中国鱼…

自学SLAM(8)《第四讲:相机模型与非线性优化》作业
前言 小编研究生的研究方向是视觉SLAM,目前在自学,本篇文章为初学高翔老师课的第四次作业。 文章目录 前言1.图像去畸变2.双目视差的使用3.矩阵微分4.高斯牛顿法的曲线拟合实验 1.图像去畸变 现实⽣活中的图像总存在畸变。原则上来说,针孔透…
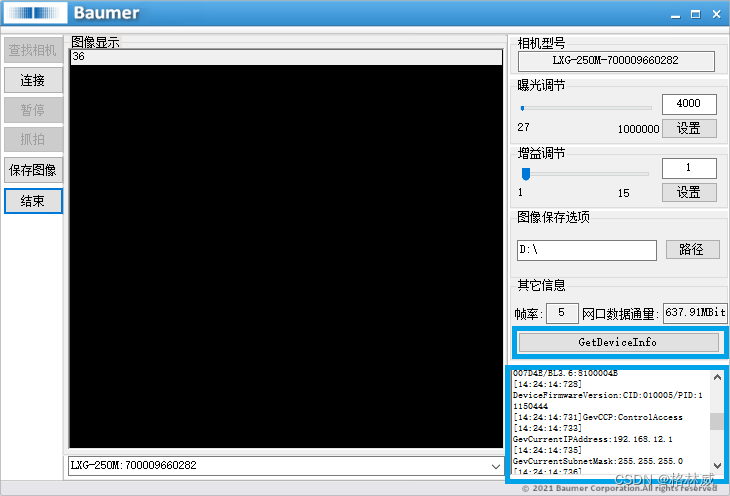
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C#) Baumer工业相机Baumer工业相机通过SDK获取相关生产信息的技术背景通过SDK获取相机信息的代码分析获取Baumer工业相机相关信息Baumer工业相机相关参数信息获取的测试 Baume…
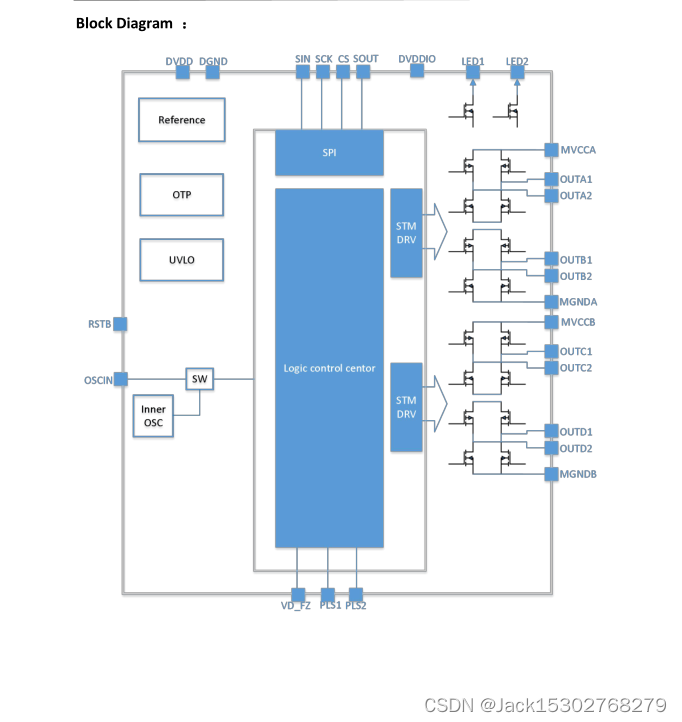
GC6109——双通道5V低电压步进电机驱动芯片,低噪声、低振动,应用摄像机,机器人等产品中
GC6109是双通道5V低电压步进电机驱动器,具有低噪声、低振动的特点,特别适用于相机的变焦和对焦系统,万向节和其他精密、低噪声的STM控制系统。该芯片为每个通道集成了256微步驱动器。带SPl接口,用户可以方便地调整驱动器的参数。内…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置软件触发模式(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPISDK设置硬件触发模式(C) Baumer工业相机Baumer工业相机NEOAPISDK和软触发模式的技术背景Baumer工业相机通过NEOAPI SDK设置软件触发模式功能1.引用合适的类文件2.通过NEOAPI SDK实现软件触发采集图像的功能 Bau…

自定义白平衡调节的步骤 白平衡怎么设置好 白平衡和色温的关系 用什么软件调节白平衡
不管是拍摄视频/图片,还是视频/图片后期处理,白平衡调节都是很重要的环节,比如在氛围感很好咖啡厅内拍一张照,但是拍出来的人物脸色蜡黄,就是因为白平衡没设置好,下面就说说自定义白平衡调节的步骤…
CCD相机和CMOS相机有什么区别
问题描述:CCD相机和CMOS相机有什么区别。在阅读一些论文时,常看到工业上的检测常用到CCD相机,和我们熟知的CMOS相机有什么区别呢。
问题解答:
CCD相机:
原理:
光电转换: 光子被感光芯片上的…
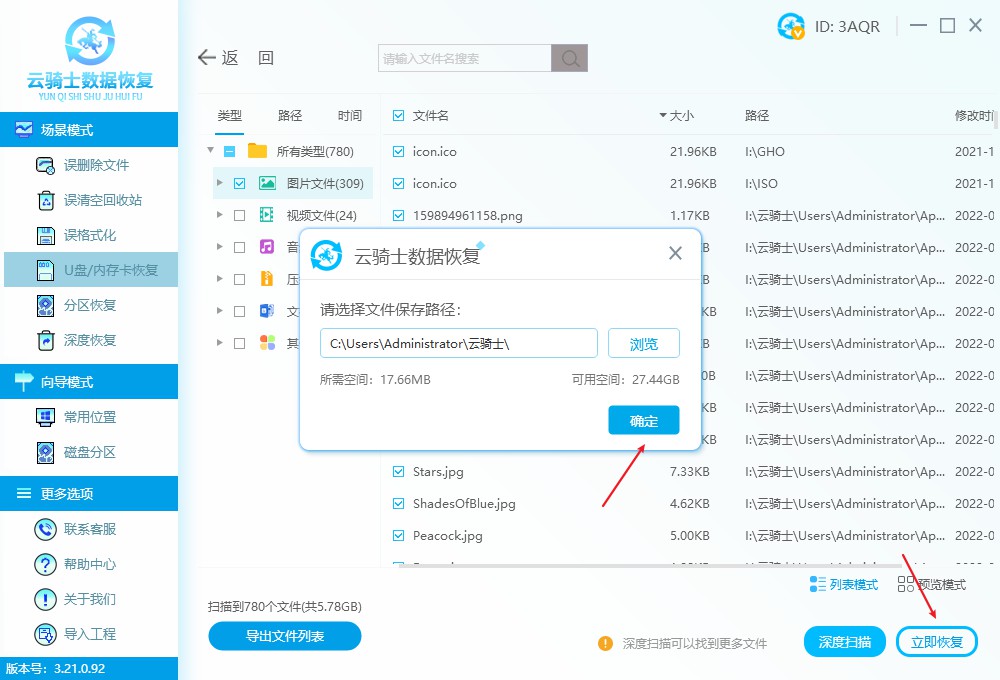
相机内存卡照片删除怎么恢复?没有备份可这样操作
在使用相机时,不小心删除了重要的照片可能是每位摄影爱好者的噩梦。然而,通过一些恢复方法,我们有机会挽救被删除的照片。本文将详细介绍相机内存卡照片删除恢复的方法。 图片来源于网络,如有侵权请告知
如果您误删了相机内存卡中…
ros来保存图像和保存记录视频的方法---gmsl相机保存视频和图片
1,保存图片
rosrun image_view image_view image:=/myimg_topic这个命令只是用来查看图像的,它并不会保存图像。如果你想要保存图像,你需要使用image_saver节点,并指定保存路径。例如: 下面指令就可以了,可以用
rosrun image_view image_saver image:=/myimg_topic _fi…
无法获取前置摄像头的预览图像?【Bug已解决-鸿蒙开发】
文章目录 项目场景:问题描述原因分析:解决方案:此Bug解决方案总结HarmonyOS和OpenHarmony区别和联系项目场景:
最近也是遇到了这个问题,看到网上也有人在询问这个问题,本文总结了自己和其他人的解决经验,解决了无法获取前置摄像头的预览图像的问题。
问题:前置摄像头…

Android 13 默认关闭 快速打开相机
介绍
在设置菜单的手势界面里,快速打开相机是默认开启的,此功能当开启时连续点击两次电源键会打开相机,现在客户需要默认关闭。
效果展示 修改 这里一开始想到的就是配置文件,在路径下果然找到了,从注释中看使我们需要的&#x…

经典文献阅读之--OccNeRF(基于神经辐射场的自监督多相机占用预测)
0. 简介
作为基于视觉感知的基本任务,3D占据预测重建了周围环境的3D结构。它为自动驾驶规划和导航提供了详细信息。然而,大多数现有方法严重依赖于激光雷达点云来生成占据地面真实性,而这在基于视觉的系统中是不可用的。之前我们介绍了《经典…
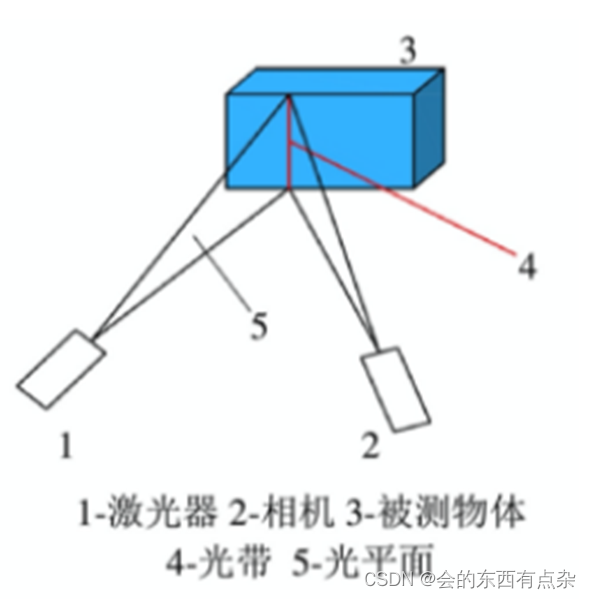
3D视觉-结构光测量-线结构光测量
概述 线结构光测量中,由激光器射出的激光光束透过柱面透镜扩束,再经过准直,产生一束片状光。这片光束像刀刃一样横切在待测物体表面,因此线结构光法又被成为光切法。线结构光测量常采用二维面阵 CCD 作为接受器件,因此…
机器视觉系统选型-选型示例分享
选型示例 该相机像元大小:3.45 3.45um,分辨率4096 3000pixel 所以传感器长宽为:14.1312 10.35mm 靶面尺寸为:17.5161mm 1.1” 所以镜头靶面要求:≥1.1”,可选择KF系列或者SA系列 放大倍率:se…
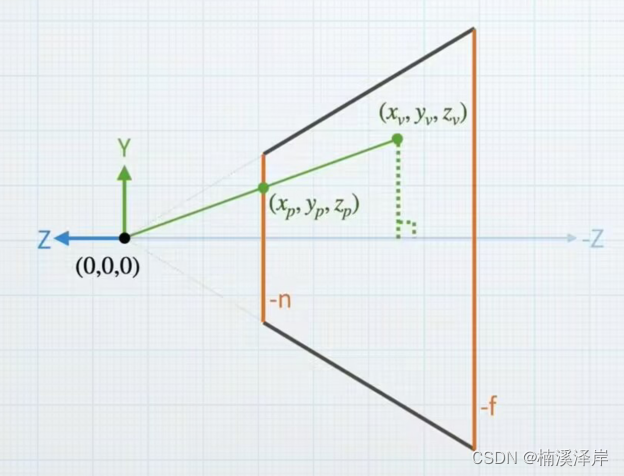
Unity中Shader裁剪空间推导(透视相机到裁剪空间的转化矩阵)
文章目录 前言一、简单看一下 观察空间—>裁剪空间—>屏幕空间 的转化1、观察空间(右手坐标系、透视相机)2、裁剪空间(左手坐标系、且转化为了齐次坐标)3、屏幕空间(把裁剪坐标归一化设置)4、从观察空…
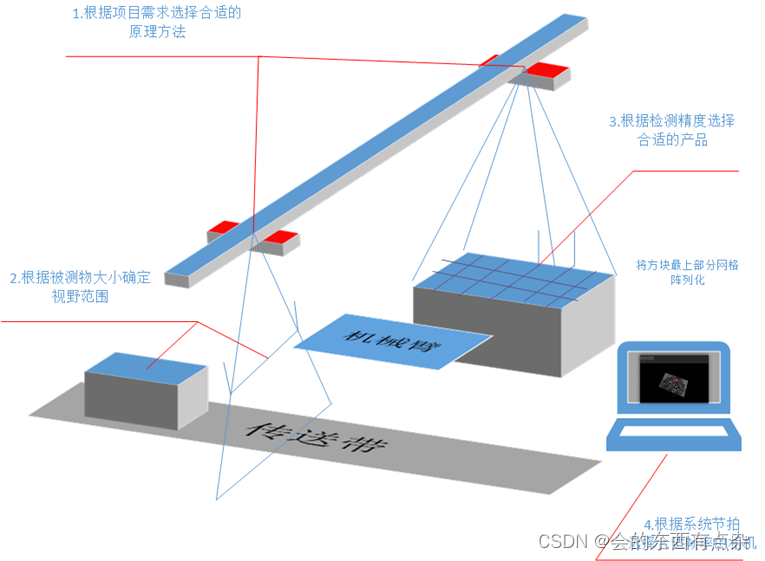
3D视觉-相机选用的原则
鉴于不同技术方案都有其适用的场景,立体相机的选型讲究的原则为“先看用途,再看场景,终评精度”,合适的立体相机在方案中可以起到事半功倍的效果。从用途上来进行划分,三维视觉方案主要应用在两个方向:测量…
机器视觉系统选型-选型-总结
一:明确需求 需求:镜面材质上的划痕检测,传送线上运动过程中拍照,无景深要求,传送线速度0.8m/s,产品间隔50mm 产品大小:100*80mm 工作距离限制:≤ 300mm 最小划痕宽度:0.…
高通相机camx-chi 架构详解
和你一起终身学习,这里是程序员Android 经典好文推荐,通过阅读本文,您将收获以下知识点: 一.初步认知二.CAMX整体架构三.CAMX CHI-CDK基本组件四.组件之间的关系五.基础组件与上层交互六.日志TAG:七.其他 网上关于高通CameraHAL3的…
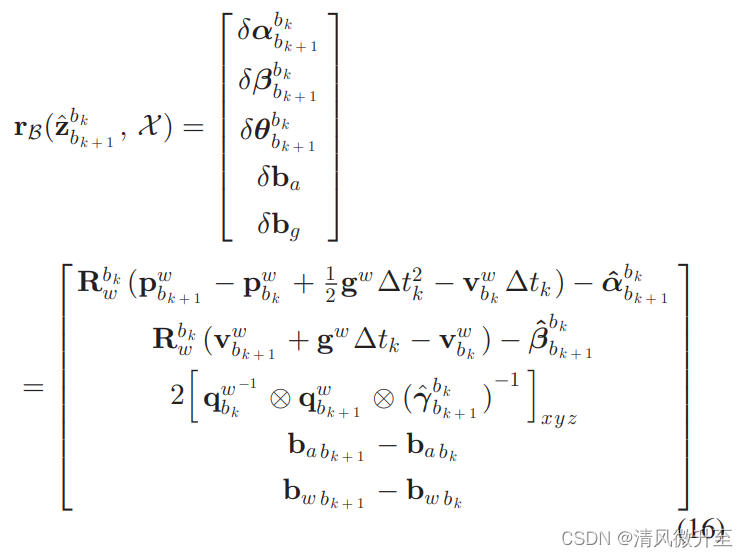
vSLAM中IMU预积分的作用--以惯性导航的角度分析
作为一个学过一点惯导的工程师,在初次接触视觉slam方向时,最感兴趣的就是IMU预积分了。但为什么要用这个预积分,在看了很多材料和书后,还是感觉模模糊糊,云里雾里。 在接触了vSLAM的更多内容后,站在历史研究…
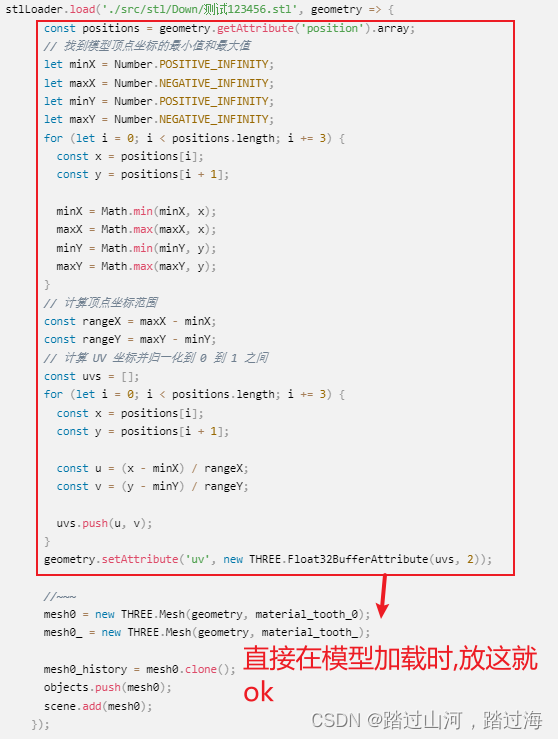
如何学习three.js
如何学习three.js 前言1. 基础概念场景(Scene): three.js中所有物体的容器。你可以把它想象成一个舞台,在这里添加物体、光源等。相机(Camera): 决定了哪部分场景会被渲染。最常用的是透视相机&…
Three.JS教程1 环境搭建、场景与相机
Three.JS教程1 环境搭建、场景与相机 一、Three.JS简介二、环境搭建1. 开发准备2. 安装 three.js3. 新建文件index.htmlmain.js 4. 关于附加组件5. 启动 三、创建场景1. 场景的概念2. 相机的概念3. 相机的几个相关概念(1)视点(Position&#…
使用rawpy库将raw格式照片转换为其他格式
目录 基本引用打开raw图片并处理为rgb数据形式保存为其他格式 raw图片包括但不限于以下后缀名文件:
.NEF、
.CR2、
.CR3、
.RAF、
.ARW 在使用过程中还需要用到PIL库 基本引用
import rawpy
from PIL import Image打开raw图片并处理为rgb数据形式
with rawpy…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用相机日志跟踪功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用相机日志跟踪功能(C) Baumer工业相机Baumer工业相机NEOAPI SDK和短曝光功能的技术背景Baumer工业相机通过NEOAPI SDK使用相机日志跟踪功能1.引用合适的类文件2.通过NEOAPI SDK使用相机日志跟踪功能3.通…
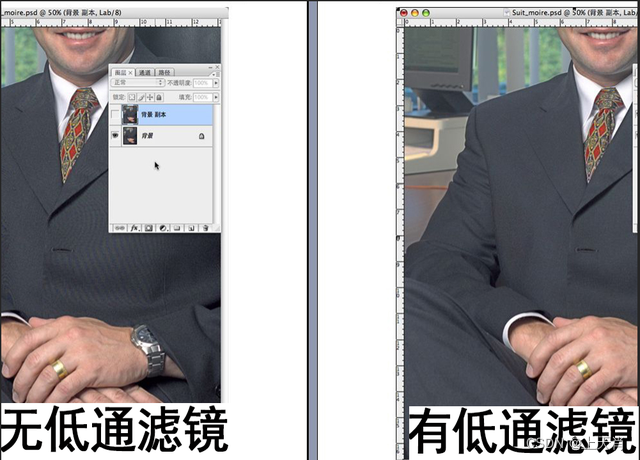
相机图像质量研究(24)常见问题总结:CMOS期间对成像的影响--摩尔纹
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

相机图像质量研究(21)常见问题总结:CMOS期间对成像的影响--隔行扫描/逐行扫描
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
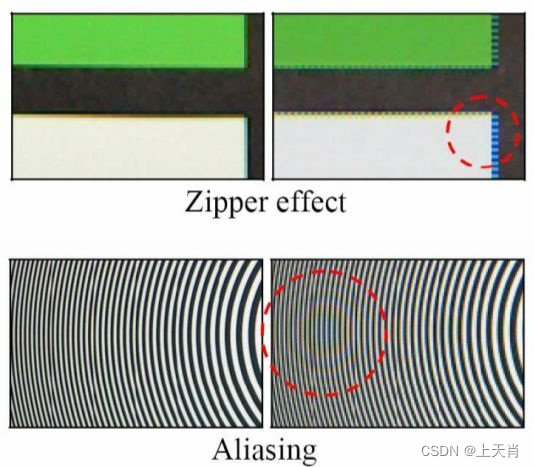
相机图像质量研究(29)常见问题总结:图像处理对成像的影响--图像插值Demosaic
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C#)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C#) Baumer工业相机Baumer工业相机使用OpenCV对图像进行边缘检测的技术背景在NEOAPI SDK里使用OpenCV建立边缘检测功能在NEOAPI SDK里使用边缘检测功能对图像进行…
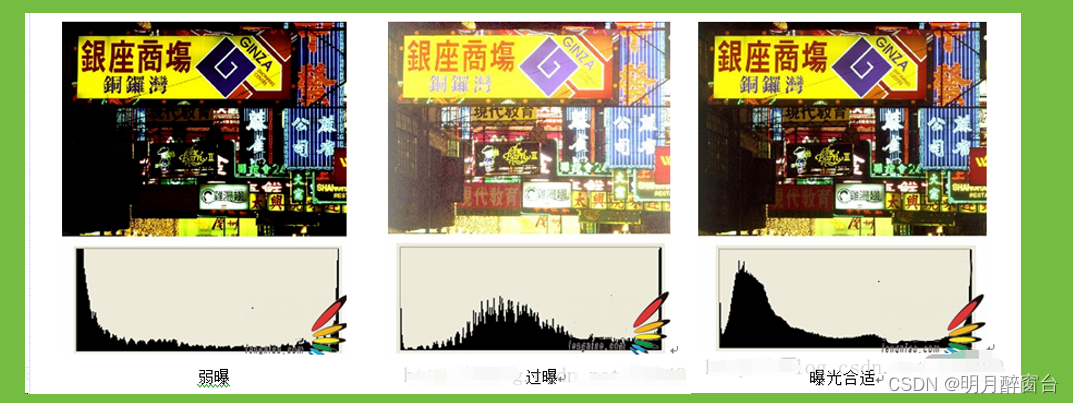
工业相机相关概念词介绍:ISP算法、线阵相机、常用术语
工业相机相关概念词介绍:ISP算法、线阵相机、常用术语
ISP基本框架及算法介绍相机的常用设置50个常用术语关于立体视觉相关算法,可参考我的专栏:https://blog.csdn.net/yohnyang/category_11720857.html
0. ISP基本框架及算法介绍
ISP(Ima…
three.js 缓动算法.easing(渐入相机动画)
效果:淡入,靠近物体 代码:
<template><div><el-container><el-main><div class"box-card-left"><div id"threejs" style"border: 1px solid red"></div><div c…
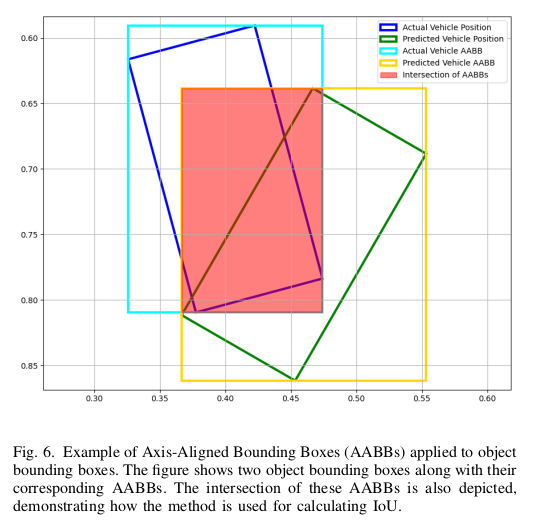
BEV-YOLO 论文学习
1. 解决了什么问题?
出于安全和导航的目的,自驾感知系统需要全面而迅速地理解周围的环境。目前主流的研究方向有两个:第一种传感器融合方案整合激光雷达、相机和毫米波雷达,和第二种纯视觉方案。传感器融合方案的感知表现鲁棒&am…
相机同步遇到的小问题
出现问题
在进行两个相机显示的时候,出现了相机显示不同步的情况,具体情况如下视频所示: 华睿/大华相机左右相机显示不同步 可以见到视频之中,右相机是比左相机更快一点的,但是有的时候就是同步的。我调用的代码是现成…
【心得杂记】简单聊聊限制高速面阵相机性能的因素
研究了限制高速面阵相机发展的因素,感觉就是揭开了薄雾面纱之后的复杂。 个人观点,不保证全对~ 欢迎讨论~ 高速相机是一个整体,涉及的各个零部件和模组很多,每个环节都会影响相机指标的提高。 高速相机主要包括的核心部件有&#…
相机图像质量研究(22)常见问题总结:CMOS期间对成像的影响--光学串扰
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为AVI视频格式(C++)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为视频格式(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的图像的技术背景在NEOAPI SDK里实现相机图像转换为视频格式 工业相机通过OpenCV实现相机图像转换为视频格式的优…
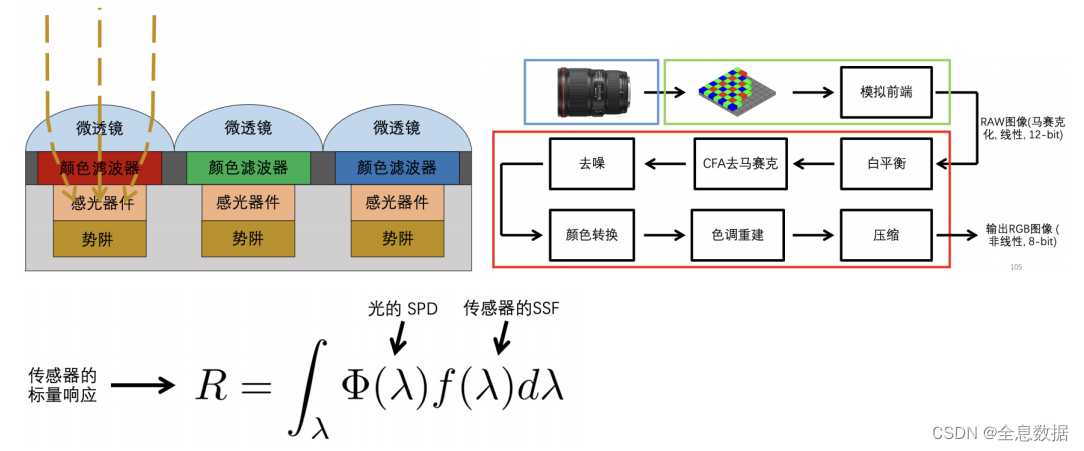
相机成像之图像传感器与ISP【四】
文章目录 1、图像传感器基础1.1 基础原理——光电效应1.2 基础的图像传感器设计1.3 衡量传感器效率的一个关键指标:光量子效率(QE)1.4 感光单元的响应1.5 像素的满阱容量1.6 像素尺寸和填充比例1.7 微透镜的作用1.8 光学低通滤波器简介1.9 传…

“高粘性,快速固化,耐高温,T泰D达K克PI聚酰亚胺专用UV胶!”
PI(聚酰亚胺)材料难以粘接,请选择:
“高粘性,快速固化,耐高温,泰达克PI聚酰亚胺专用UV胶!” PI(聚酰亚胺)是一种具有耐高低温性能(在-…
python打开相机,用鼠标左键框选矩形区域,支持一次框选多个矩形区域,通过鼠标右标清除上一次画的矩形。
方案一
import cv2# Global variables
rectangles []
current_rectangle []
drawing False# Mouse callback function
def mouse_callback(event, x, y, flags, param):global rectangles, current_rectangle, drawingif event cv2.EVENT_LBUTTONDOWN:drawing Truecurren…
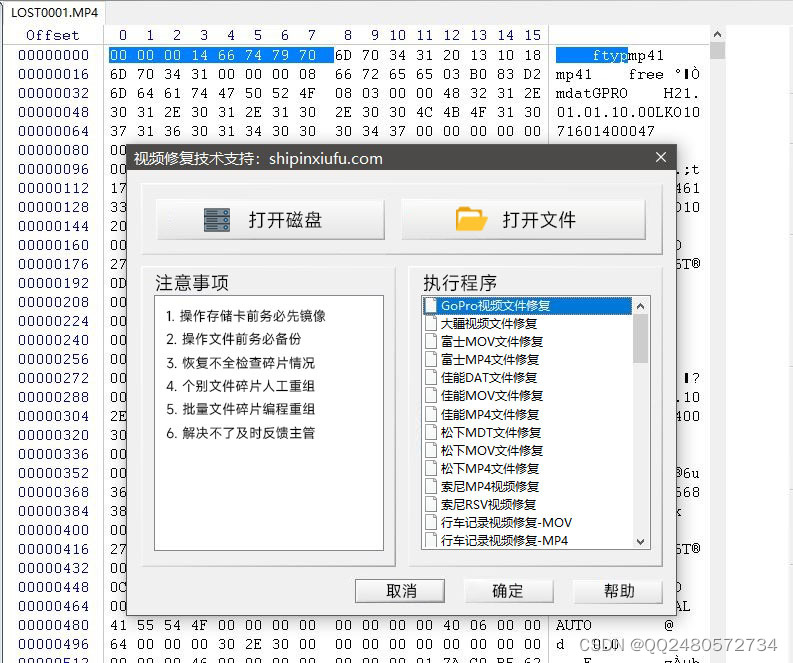
相机SD卡格式化恢复视频打不开的解决办法
下面是GoPro HERO 10相机格式化SD卡后恢复MP4视频损坏的案例,文件恢复后无法播放。 一台GoPro HERO 10相机,在相机上误操作格式化TF卡,里面全部是MP4视频,删除之后只录一小段,下载数据恢复软件恢复,但是恢复…
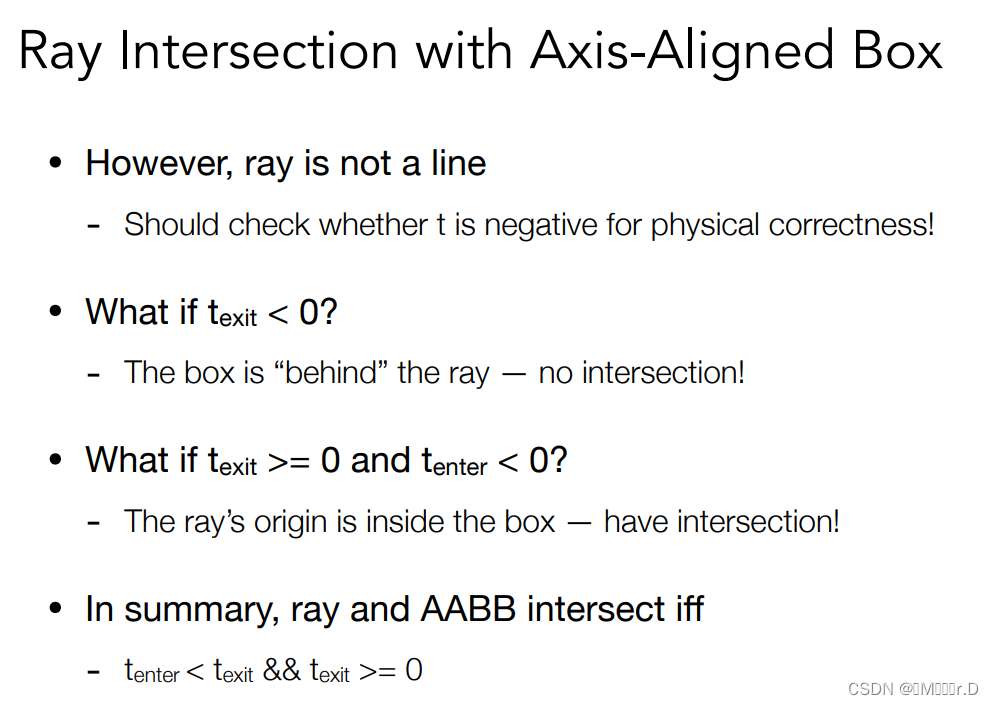
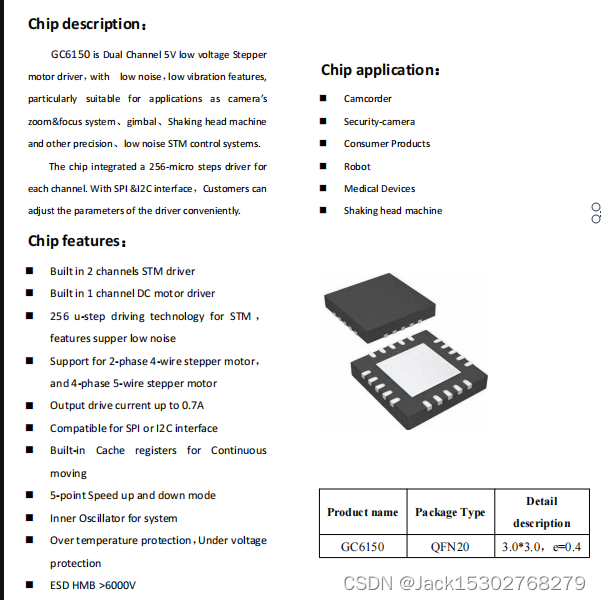
5V低压步进电机驱动芯片GC6150,应用于摄像机,机器人 医疗器械等产品中。具有低噪声、低振动的特点
GC6150是双通道5V低压步进电机驱动器,具有低噪声、低振动的特点,特别适用于相机变焦对焦系统、万向架、摇头机等精度、低噪声STM控制系统,该芯片为每个通道集成了一个256微步的驱动器。通过SPI & T2C接口,客户可以方使地调整驱…

LabVIEW精确测量产品中按键力和行程
项目背景
传统的按键测试方法涉及手工操作,导致不一致和效率低下。在汽车行业中,带有实体按键的控制面板非常常见,确保一致的按键质量至关重要。制造商经常在这些组件的大规模、准确测试中遇到困难。显然,需要一个更自动化、精确…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现Bitmap的图像转换功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现Bitmap的图像转换功能(C) Baumer工业相机Baumer工业相机NEOAPI SDK实现Bitmap的图像转换功能技术背景Baumer工业相机通过NEOAPI SDK实现Bitmap的图像转换功能1.引用合适的类文件2.通过NEOAPI SDK实现Bi…
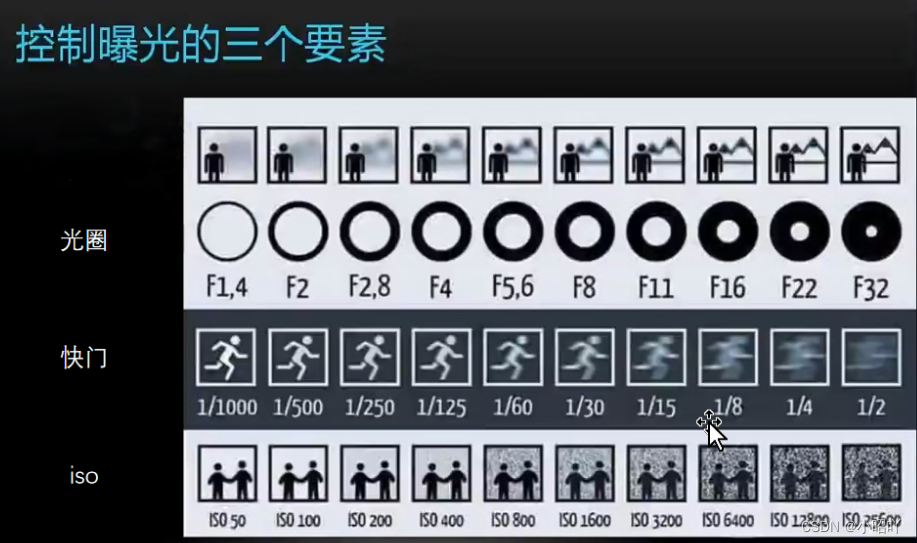
c# 海康照相机操作封装类(网口,USB)
需求 在上位机开发中, 海康照相机的使用应该是很常见的,主要是网口通讯的相机用的多,有时也会用一些USB接口相机。以前项目都在赶时间做。没有时间去好好设计和封装。时间长了发现重复代码就很多,还有没有设计和封装的代码,代码份数和相机个数对等,说白了就是一个相机写一…
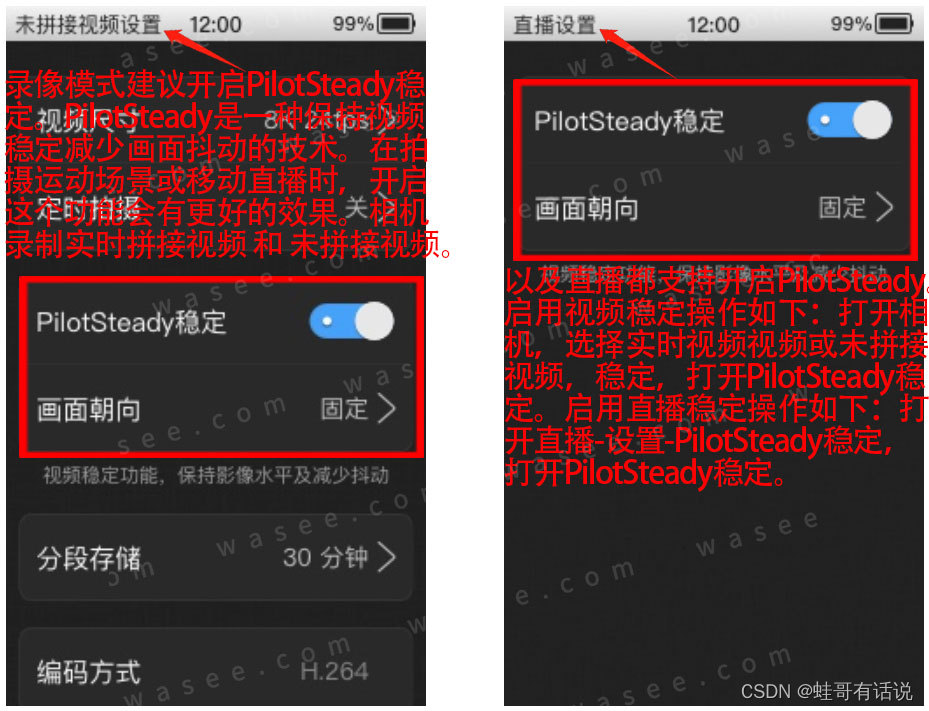
0基础学习VR全景平台篇第139篇:如何用圆周率全景相机拍摄VR全景
新手入门
圆周率科技,成立于2012年,是中国最早投身嵌入式全景算法研发的团队之一,亦是全球市场占有率最大的全景算法供应商。相继推出一体化智能屏、支持一键高清全景直播的智慧全景相机--Pilot Era和Pilot One,为用户带来实时畅…
ORBSLAM3 运行流程 以rgbd_tum.cc函数为例进行分析
一、运行 使用的是D435i相机自己录制的数据。
运行命令:
./Examples/RGB-D/rgbd_tum /opt/vslam/ORB_SLAM3_detailed_comments-dense_map_new/Vocabulary/ORBvoc.txt /opt/vslam/ORB_SLAM3_detailed_comments-dense_map_new/Examples/RGB-D/TUM1.yaml /opt/vsl…
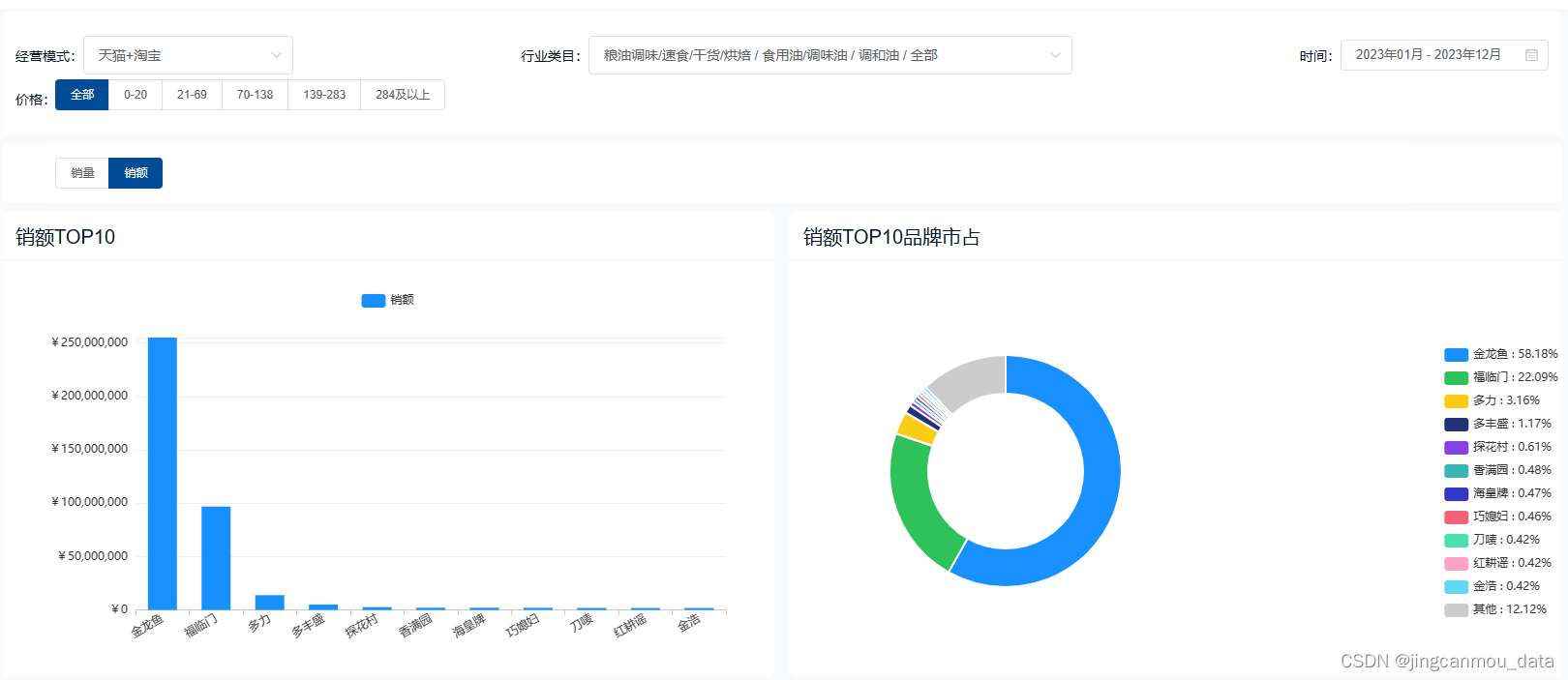
2023年天猫食用油市场行业分析(电商数据查询软件):市场细分,营养调和油高速成长
食用油是人类膳食的重要组成部分,除了为日常饮食提供美味外,也是人体所需脂肪和能量的重要来源,对人体健康发挥着重要作用。因此,作为日常生活中的刚需品,食用油市场的整体规模也较大。
首先来看食用油市场的年度销售…

Unity3d Cinemachine篇(六)— TargetGroup
文章目录 前言使用TargetGroup追随多个模型1. 创建二个游戏物体2. 创建TargetGroup相机3. 设置相机4. 完成 前言
上一期我们简单的使用了ClearShot相机,这次我们来使用一下TargetGroup 使用TargetGroup追随多个模型
1. 创建二个游戏物体 2. 创建TargetGroup相机 3…
【安防】三个问题:IPC和ITC主要的差异点和相同点 、影响图像成像效果的因素有哪些、摩尔纹如何产生的和消除方法
问题一、IPC和ITC主要的差异点和相同点 差异点
1、应用场景:IPC主要应用于普通安防监控领域,如广场、商场、公园、写字楼等。它们通常被用于监控室内或有限区域的安全,例如,监控办公室、仓库、门口等。而ITC则主要应用于交通领…
Unity3D实现坦克大战
一、效果图演示 二、逻辑剖析
从界面上:
需要一个Canvas满屏对着用户,该Canvas上展示用户的游戏数据,比如血条。需要一个Canvas放在蓝色坦克上方,也需要实时对着用户,显示敌人的血条信息两个坦克一个平面Plane放草地…
Three.js学习6:透视相机和正交相机
一、相机
相机 camera,可以理解为摄像机。在拍影视剧的时候,最终用户看到的画面都是相机拍出来的内容。 Three.js 里,相机 camera 里的内容就是用户能看到的内容。从这个角度来看,相机其实就是用户的视野,就像用户的眼…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用ForceIP强制修改网口IP功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Binning像素合并功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和Force IP功能的技术背景Baumer工业相机通过NEOAPI SDK使用ForceIP强制修改网口IP功能1.引用合适的类文件2.通过NEOAPI SDK使用Force…
unity 相机截图
/// <summary> /// 针对相机的截图 /// </summary> public void CameraScreenShot(){ Rect rect new Rect(0,0,Screen.width,Screen.height); RenderTexture renderTexture RenderTexture.GetTemporary((int)rect.width,(int)rect.height,0, RenderTextureFormat…

matlab如何标定相机内外参和畸变参数
关于内外参矩阵和畸变矩阵可以学习
https://blog.csdn.net/qq_30815237/article/details/87530011?spm1001.2014.3001.5506
在APP中找到 camera Calibrator 点击 Add Images,导入拍照图片。标定20张左右就够了,然后角度变一下,但不需要变太…

透明PP专用UV胶水粘接PP材料高效率的提升生产效率
使用透明PP专用UV胶水粘接PP材料是提高生产效率的方法。以下方法,可以助您在生产中实现高效的PP材料粘接:
1.选用合适的透明PP专用UV胶水
选择经过专门设计用于透明PP的UV胶水。这种胶水具有透明性,能保证粘接后的清晰度和外观。
2.自动…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现Mono12和Mono16位深度的图像保存(C#)
Baumer工业相机堡盟工业相机如何联合BGAPI SDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#) Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:NEOAPI SDK联合OpenCV进行图…
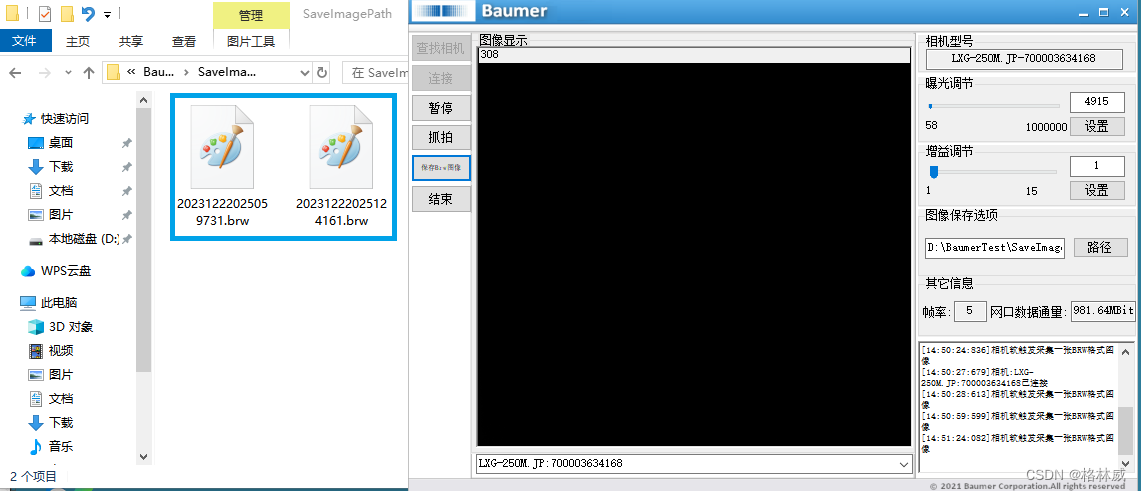
Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C#) Baumer工业相机Baumer工业相机通过SDK实现Raw格式的图像保存的技术背景通过SDK获取相机信息的代码分析Baumer工业相机回调函数里保存原始图像数据Baumer保存Raw图像格式重要核心代…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机图像转换为Bitmap图像功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机图像转换为Bitmap图像功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK实现Bitmap的图像转换功能技术背景Baumer工业相机通过NEOAPI SDK实现Bitmap的图像转换功能1.引用合适的类文件2.通过NEOAPI …

3dmax渲不出模型是什么原因---模大狮模型网
3DMax无法渲染模型可能有多种原因。以下是一些常见的问题和解决方法: 材质设置错误:检查模型的材质设置是否正确,包括纹理贴图的路径、UV映射是否正确等。确保材质的属性设置正确,如颜色、反射率、透明度等。
灯光设置问题&#…

相机图像质量研究(31)常见问题总结:图像处理对成像的影响--图像差
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Force IP强制修改网口IP功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Force IP强制修改网口IP功能(C) Baumer工业相机Baumer工业相机NEOAPI SDK和Force IP功能的技术背景Baumer工业相机通过NEOAPI SDK使用ForceIP强制修改网口IP功能1.引用合适的类文件2.通过NEOAPI SDK使用…
目标检测YOLO系列从入门到精通技术详解100篇-【目标检测】机器视觉(基础篇)(十七)
目录
几个高频面试题目
如何选择合适的面扫相机
算法原理
分辨率与视野
像素尺寸与景深
像素尺寸

android 相机预览数据两个 GL_TEXTURE_EXTERNAL_OESS和GL_TEXTURE_2D类型的数据应用场景,以及同时渲染的原因和关系
相机哪些功能可用GL_TEXTURE_2D类型的数据渲染?
在Android的相机预览中,可以使用GL_TEXTURE_2D类型的数据来渲染以下功能:
界面元素:应用程序可以使用GL_TEXTURE_2D类型的纹理来渲染界面元素,例如按钮、文本框、标签…
相机图像质量研究(38)常见问题总结:编解码对成像的影响--呼吸效应
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

oak-d-lite摄像头 去噪处理
前言 试过了各种滤波才知道,为啥oak在示例算法只是使用5X5滤波而不使用更好的滤波的原因了。
实验内容 oak-d-lite使用的工业相机噪声主要表现为随机的亮度变化,使用Non-Local Means Denoising算法后去噪效果很好(左为原图)&…
3dmax效果图渲染出现曝光怎么解决?
在使用3ds Max完成效果图渲染工作时,有时会遇到曝光过度的问题,这会使得渲染的图像出现光斑或者过亮,损害了效果的真实感和美观度。那么解决解决3dmax曝光问题呢?一起看看吧! 3dmax效果图渲染出现曝光解决方法
1、相机…
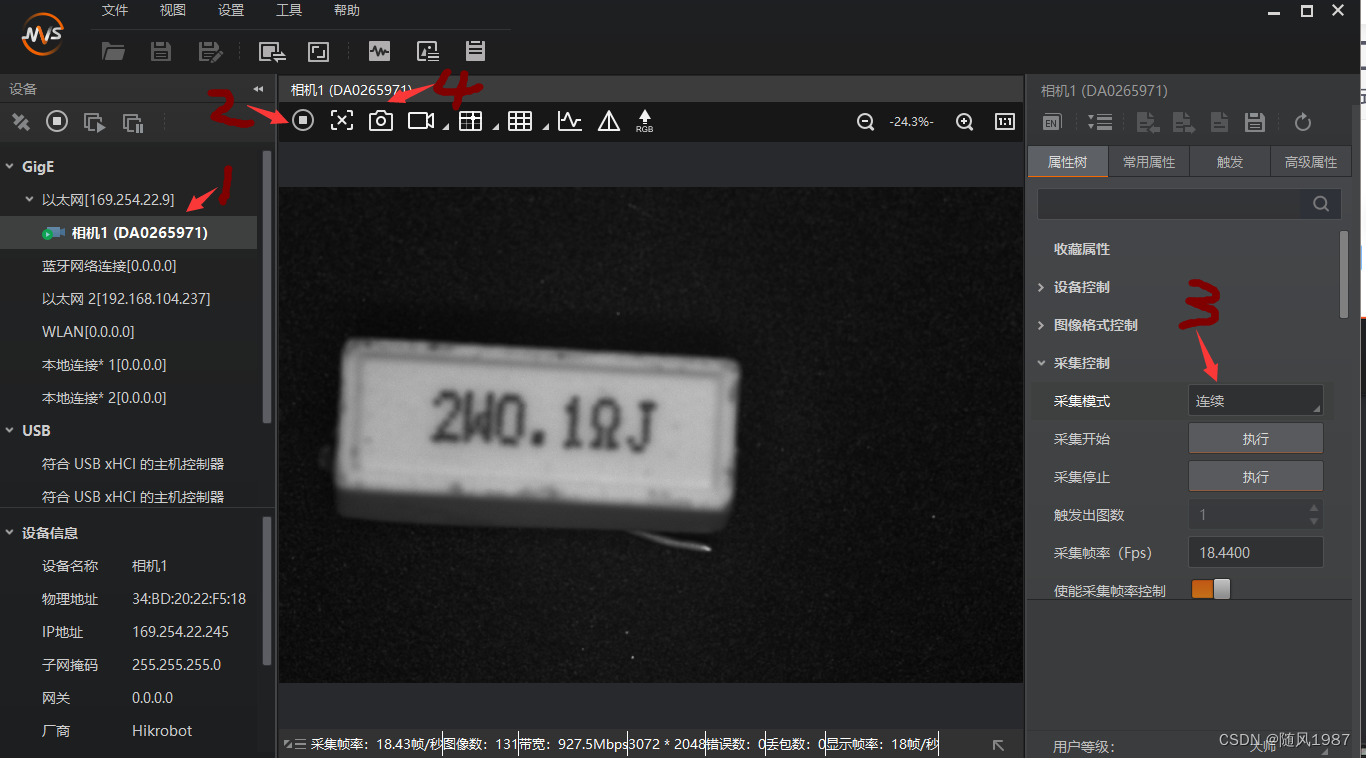
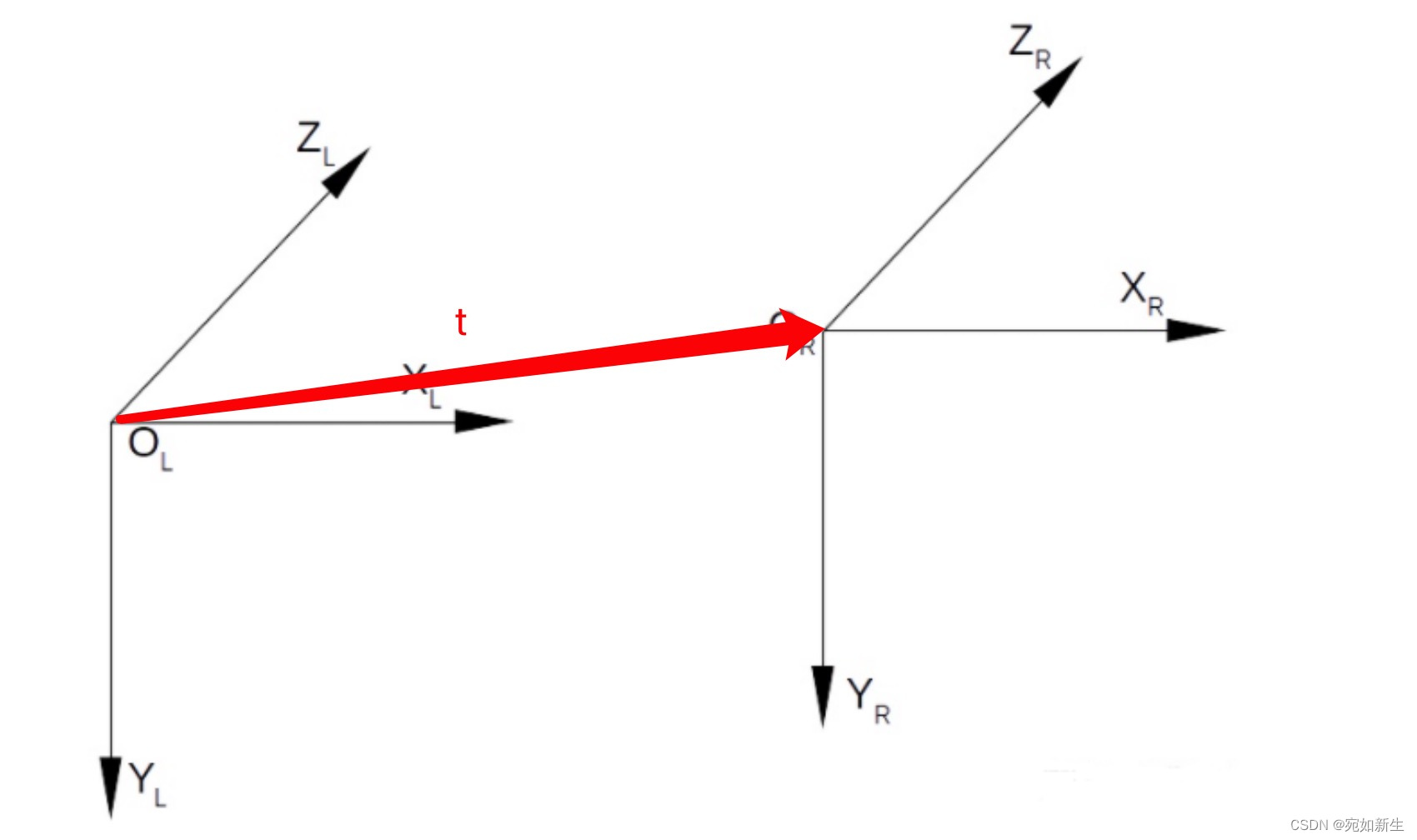
12. 双目视觉之极线矫正
目录 1. 为何要进行极线矫正?2. 极线矫正过程。 1. 为何要进行极线矫正?
之前的文章立体视觉基础中介绍单目相机无法获得深度信息,我们可以通过多个相机来实现立体视觉。通过两个相机对某场景同时观测时,当我们知道了相机的内&am…
相机传感器和镜头传感器面积关系
相机的传感器尺寸和镜头传感器尺寸之间存在密切关系。
传感器尺寸指的是相机传感器的大小,通常用对角线长度表示,单位为英寸。传感器尺寸越大,相机能捕捉到的光线就越多,成像质量也就越好。
镜头传感器尺寸指的是镜头所能覆盖的…

ToF传感器在移动机器人中的作用
原创 | 文 BFT机器人 在日新月异的机器人技术领域,技术的无缝整合正引领着人类与机器交互方式的革新潮流。ToF传感器作为变革性创新的一个例子,对移动机器人更好地感知周围环境起到了决定性的作用。 ToF传感器与激光雷达技术在创建深度图方面有着异曲同…

Android Camera2 API 后台服务
最近在搞CameraAPP需要将Camera2弄成一个后台服务,发现跟预览的Activity没多大变动只是加了Service,和一些简单的修改。之前的公司也用到Camera2,发现用到的时候还是蛮多的所以记录一下,代码在文章末尾
camera2的结构如下&#x…
机器视觉系统设计:视觉系统中的成像基准
开发视觉系统的一个重要活动是验证其部署是否符合工程规范。一个成功的视觉应用程序的两个特点是它无需工程师干涉情况下正常工作了多长时间,以及它的维护和复制部署是多么简易。实现所有如上所述目标的一个关键步骤是确定视觉系统的基准。
在这里使用的上下文中&a…

相机倾斜棋盘格标定全记录 vs200+opencv安装
论文参考是这个 Geiger A, Moosmann F, Car , et al. Automatic camera and range sensor calibration using a single shot[C]//Robotics and Automation (ICRA), 2012 IEEE International Conference on. IEEE, 2012: 3936-3943. 代码是这个github
花了一上午配好了c环境。。…
Unity3d Cinemachine篇(完)— TargetGroup
文章目录 前言使用TargetGroup追随多个模型1. 创建二个游戏物体2. 创建TargetGroup相机3. 设置相机4. 完成 前言
上一期我们简单的使用了ClearShot相机,这次我们来使用一下TargetGroup 使用TargetGroup追随多个模型
1. 创建二个游戏物体 2. 创建TargetGroup相机 3…
vp与vs联合开发-通过FrameGrabber连接相机
添加控件
1.CogRecordDisplay 控件 用于显示图像 初始化相机对象方法 //启动窗体时 调用初始化相机方法 //封装相机关闭方法 //窗体关闭时 调用相机关闭方法 拍照 设置采图事件 // 保存图像 设置曝光按钮事件 1.可变参数
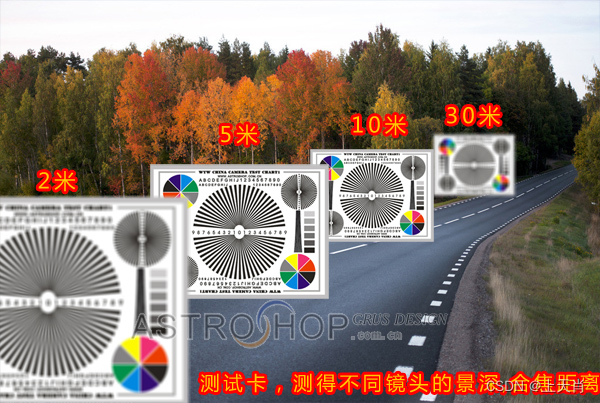
相机图像质量研究(5)常见问题总结:光学结构对成像的影响--景深
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

负重20kg复合翼垂直起降无人机应用,复合翼无人机技术分析
主要任务应用
1.管线巡查
挂载可见光/红外二合一光电载荷和小型SAR设备,对既定线路进行昼夜巡视侦察,利用图像实时传回指挥控制中心,可用于石油管路、电力线路、舰艇航线及周围态势感知,利于依据现场实情进行战略决策和指令传达…
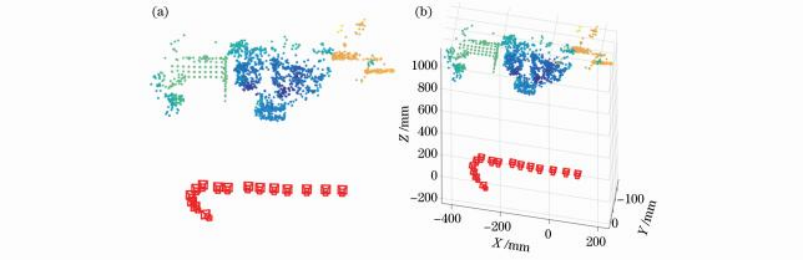
【研究】聚焦型光场相机等效多相机模型及其运动恢复结构应用
摘要:聚焦型光场相机在运动恢复结构(SFM)和场景重建等领域中的作用日益显现。但是传统SFM算法因聚焦型光场相机具有特殊的结构而难以直接应用。针对这一问题提出一种完整的聚焦型光场相机等效多目相机模型。在此基础上,利用传统多目相机的SFM算法,给出了…
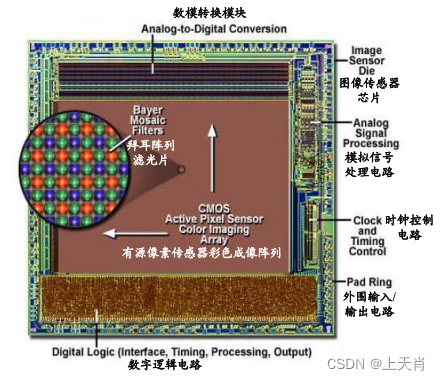
相机图像质量研究(17)常见问题总结:CMOS期间对成像的影响--靶面尺寸
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
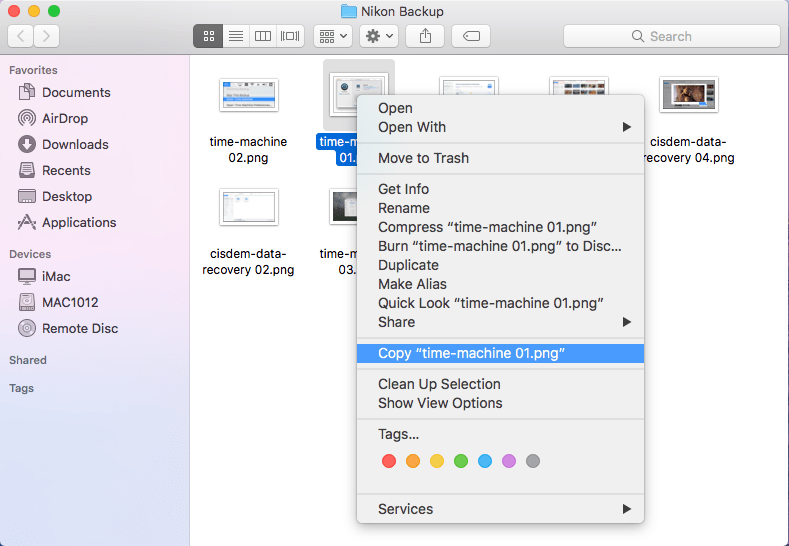
想要在尼康相机上恢复已删除的照片?这几个方法请收好!
尼康是最知名的国际品牌之一,其数码相机产品深受众多摄影爱好者的喜爱。手持尼康相机,壮丽的风景和生动的人物都可以作为一幅幅惊艳的镜头被永远记录下来。
遗憾的是,尼康相机拍摄的照片意外丢失在某种程度上是不可避免的。原因有可能是误删…
打开 Camera app 出图,前几帧图像偏暗、偏色该怎样去避免?
1、问题背景
使用的安卓平台,客户的应用是要尽可能快的获取到1帧图像效果正常的图片。
但当打开 camera 启动出流后,前3-5帧图像是偏暗、偏色的,如下图所示,是抓取出流的前25帧图像,
前3帧颜色是偏蓝的,…
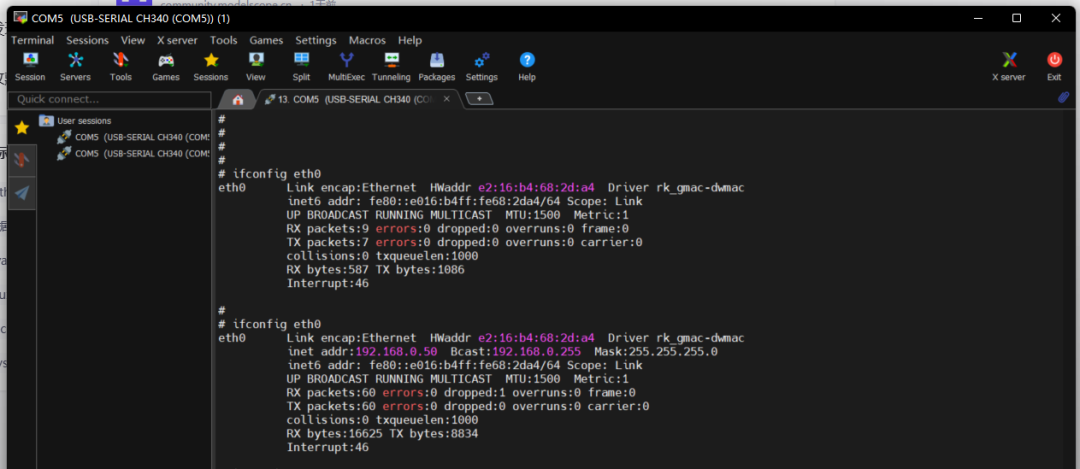
挑战6万月薪【三】Purple Pi OH开发板带你7天入门OpenHarmony!
现在为止,我们已经完成了Purple Pi OH主板的串口调试和部分配件的连接,接下来,让我们趁热打铁,完成剩余配件的连接!
注:配件连接前请断开主板所有供电,避免敏感电路损坏!
一. 接口…
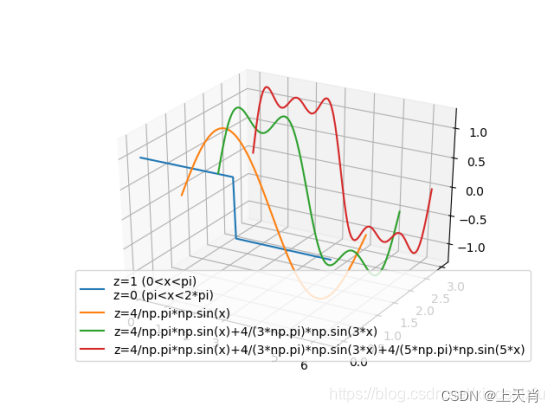
相机图像质量研究(32)常见问题总结:图像处理对成像的影响--振铃效应
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
激光雷达点云投影到图像
本文旨在记录一些关于激光雷达点云投影到图像的心得。
一、数据准备
1.相机内参(intrinsic matrix),获得方法见ROS功能包camera_calibration标定相机内参_ros camera calibration-CSDN博客
2.激光雷达与相机的外参(extrinsic m…

iPhone 16 组件泄露 揭示了新的相机设计
iPhone 16 的发布似乎已经等了很长一段时间,但下一个苹果旗舰系列可能会在短短 7 个月内与我们见面——而新的组件泄漏让我们对可能即将到来的重新设计有了一些了解。后置摄像头模块。
爆料者 Majin Bu(来自 MacRumors)获得的示意图显示&…

相机图像质量研究(34)常见问题总结:图像处理对成像的影响--拖影
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
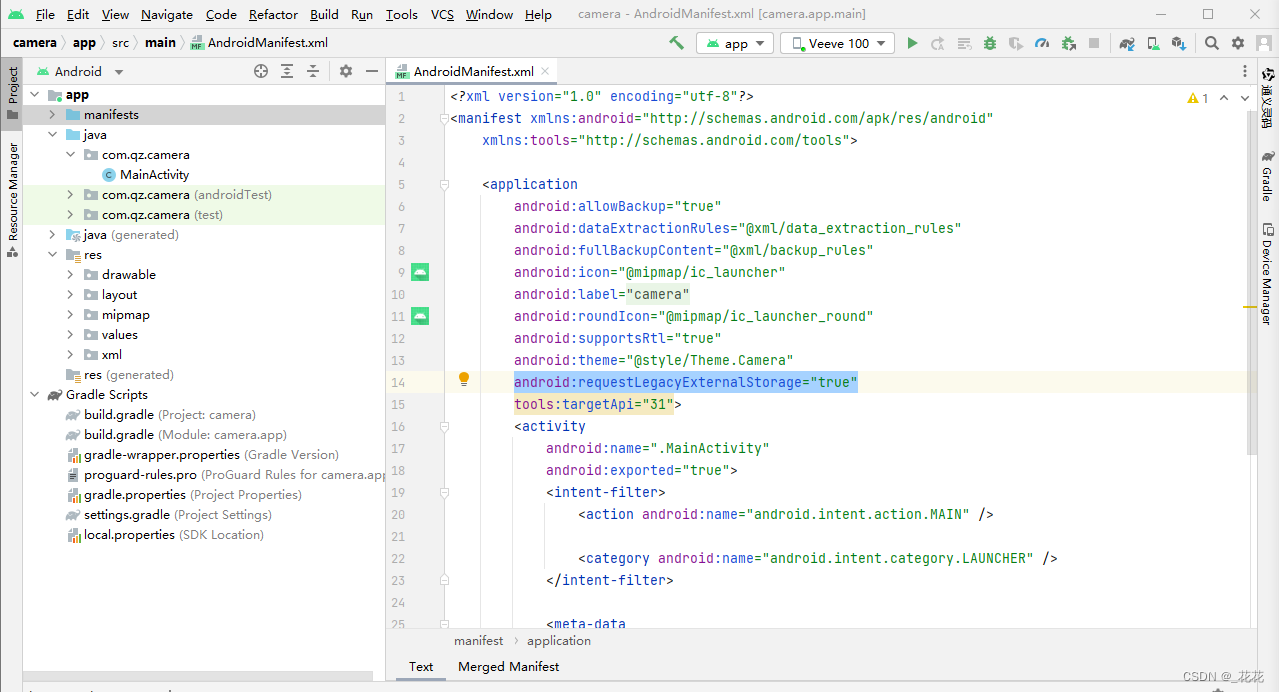
Android相机调用-libusbCamera【外接摄像头】【USB摄像头】 【多摄像头预览】
有的自定义系统,对于自己外接的USB摄像头,android原生的camera和camera2都无法打开,CameraX也用不了。这时候就要用libusbCamera,这个库可以打开摄像头,还可以多摄像头同时预览。本文主要是同时打开3个USB摄像头的项目…
(三)相机的分类与选型
preface 相机的选择不仅直接决定所采集到的图像的分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
一、相机分类
分类方式相机名称特点概要成像过程传统/胶片相机景物成像聚焦在胶片上,形成的像是实像数码相机景物成像聚焦在CCD或CMOS上&…
相机图像质量研究(7)常见问题总结:光学结构对成像的影响--镜片固化
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
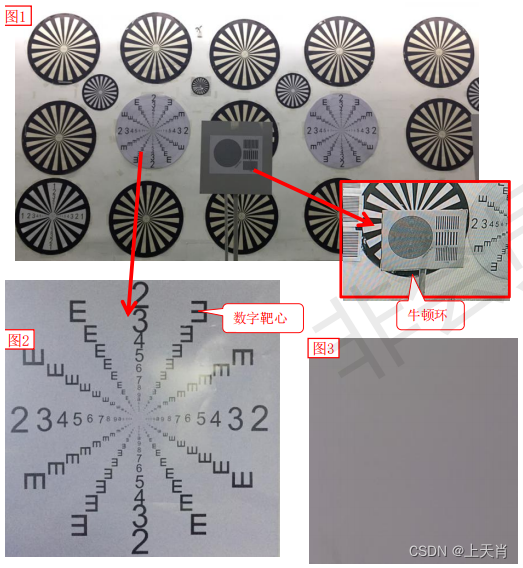
相机图像质量研究(8)常见问题总结:光学结构对成像的影响--工厂调焦
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

相机图像质量研究(10)常见问题总结:光学结构对成像的影响--光圈
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
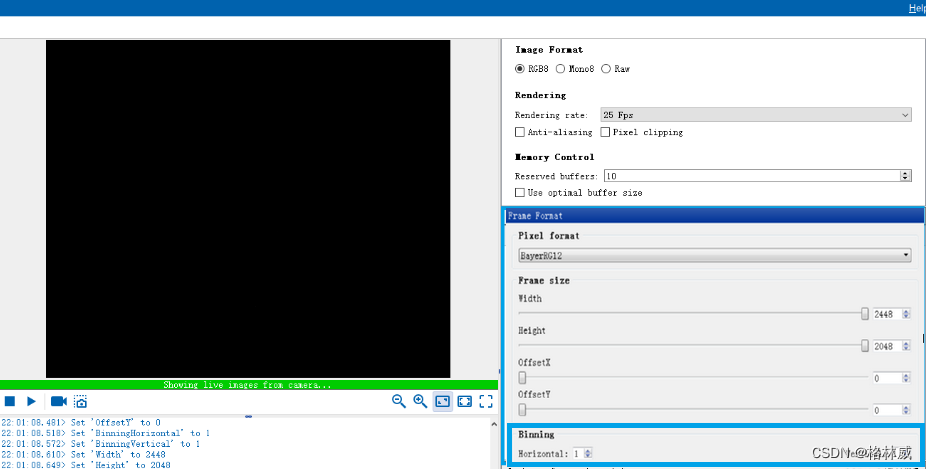
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Binning像素合并功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Binning像素合并功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和短曝光功能的技术背景Baumer工业相机通过CameraExplorer软件使用Binning功能Baumer工业相机通过NEOAPI SDK使用Binning功能1.引用合…
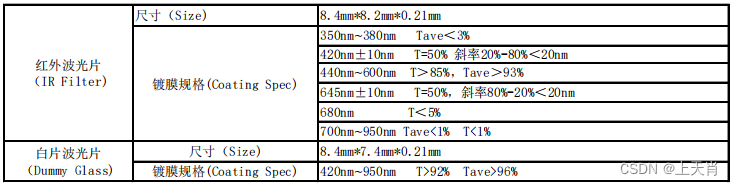
相机图像质量研究(16)常见问题总结:光学结构对成像的影响--IRCUT
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

相机图像质量研究(13)常见问题总结:光学结构对成像的影响--鬼影
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

相机图像质量研究(15)常见问题总结:光学结构对成像的影响--暗角
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
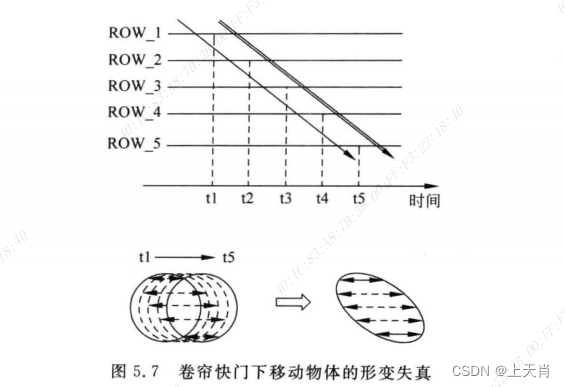
相机图像质量研究(20)常见问题总结:CMOS期间对成像的影响--全局快门/卷帘快门
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
相机图像质量研究(14)常见问题总结:光学结构对成像的影响--伪像
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
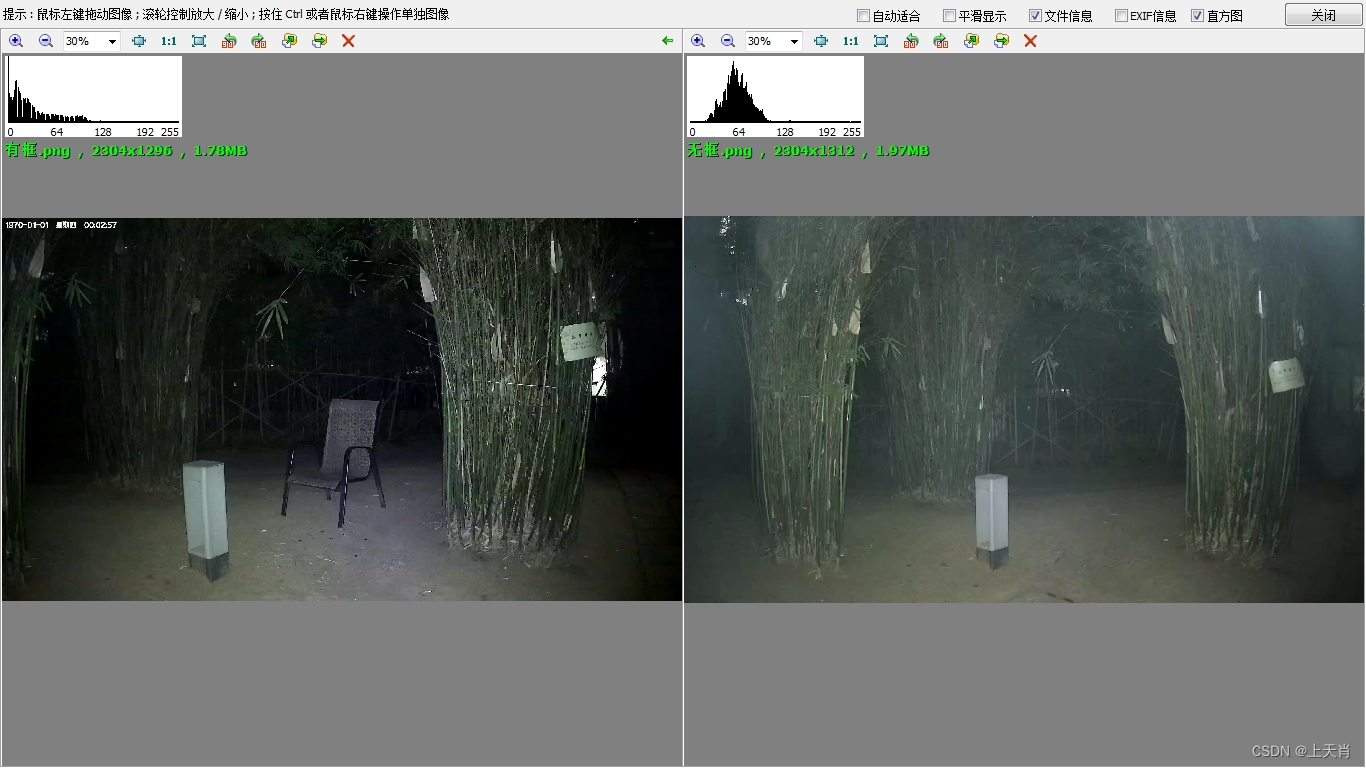
相机图像质量研究(27)常见问题总结:补光灯以及遮光罩对成像的影响--遮光罩
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
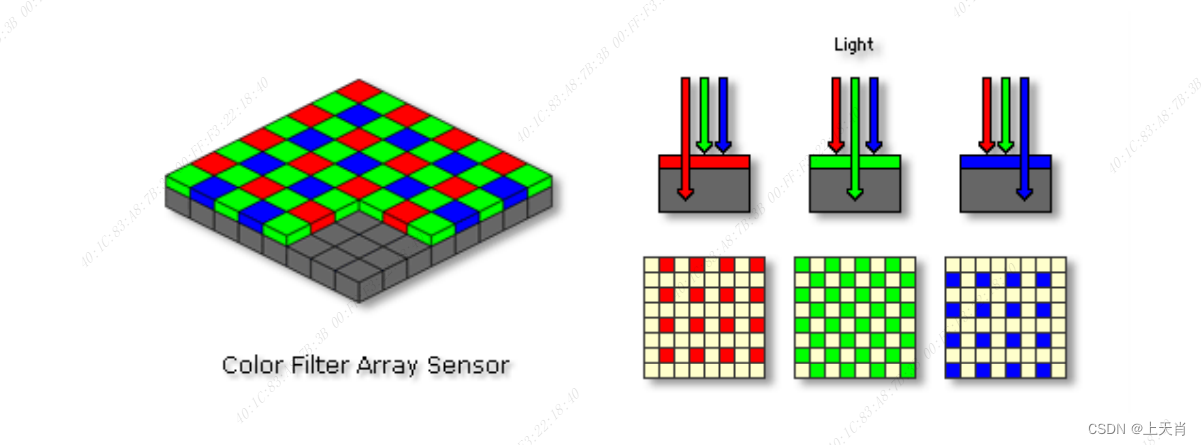
相机图像质量研究(18)常见问题总结:CMOS期间对成像的影响--CFA
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

提升VR全景摄影画质的8个因素
如今VR全景拍摄的门槛已经很低,包括无人机、全景相机等都具有一键全景的功能。很多初次接触VR全景拍摄的朋友会发现同样的设备,为啥拍出来的效果就不如别人呢?
其实,要提升VR全景拍摄质量,只需要了解以下几个环节&…
Android 相机启动流程笔记
和你一起终身学习,这里是程序员Android 经典好文推荐,通过阅读本文,您将收获以下知识点: 一、Camera 框架介绍: Camera的框架分为Kernel部分和hal部分,其中kernel部分主要有两块: image sensor driver&…

第二篇:CamX初认识(框架、代码结构介绍)
第二篇:CamX初认识
这篇文章分下面几点来展开:
1、CamX整体架构图;
2、CamX基本组件及其概念;
3、CamX代码目录结构;
4、CamX相关名词;
一、CamX整体架构图
目前Android主流的机型,采用高通芯片的,使用的基本都是camx架构。
之前旧的架构叫做mm-camera,camx架构…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取每张图像的微秒时间和FrameID功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取每张图像的微秒时间和FrameID功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和短曝光功能的技术背景工业相机FrameID是什么?Baumer工业相机通过NEOAPI SDK获取每张图像的微秒时间和Frame…
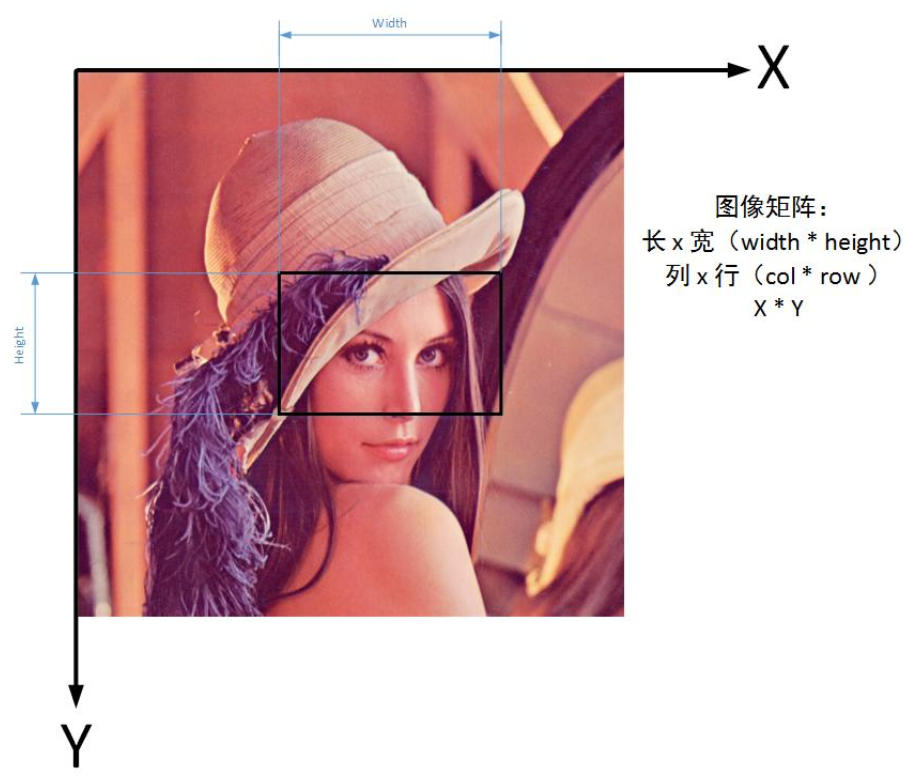
【教程】详解相机模型与坐标转换
转载请注明出处:小锋学长生活大爆炸[xfxuezhang.cn] 由于复制过来,如果有格式问题,推荐大家直接去我原网站上查看: 相机模型与坐标转换 - 生活大爆炸 目录
经纬度坐标系 转 地球直角坐标系大地直角坐标系 转 经纬度坐标系地理坐标…

11. 双目视觉之立体视觉基础
目录 1. 深度恢复1.1 单目相机缺少深度信息1.2 如何恢复场景深度?1.3 深度恢复的思路 2. 对极几何约束2.1 直观感受2.2 数学上的描述 1. 深度恢复
1.1 单目相机缺少深度信息
之前学习过相机模型,最经典的就是小孔成像模型。我们知道相机通过小孔成像模…
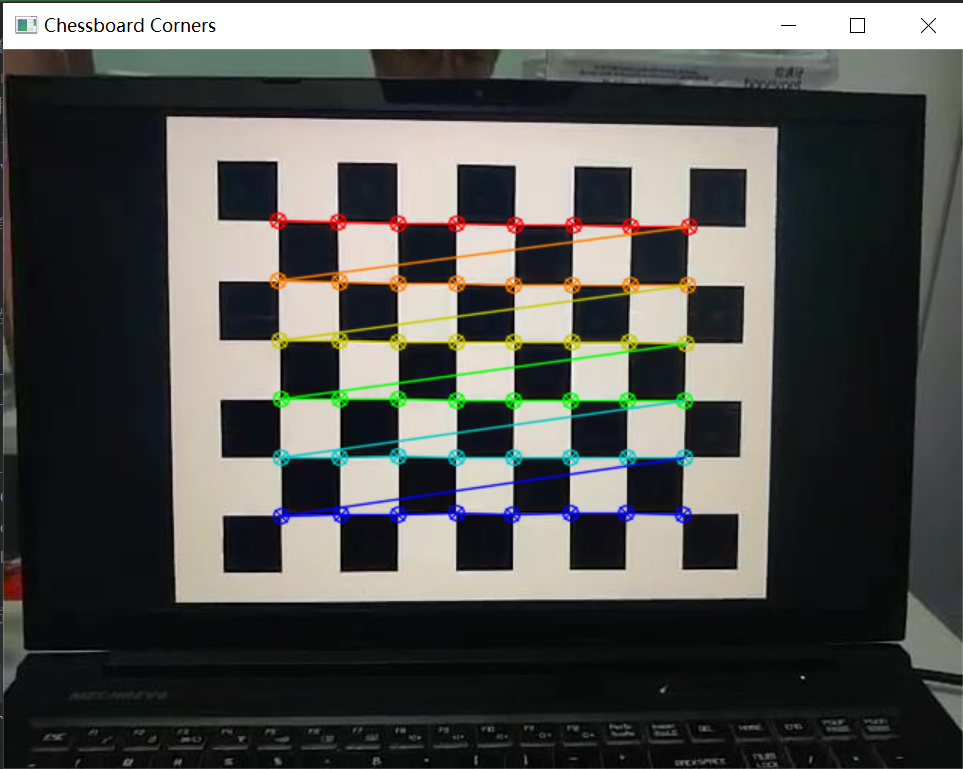
手机单目相机内参标定
使用软件:
参考我之前的文章: 软件地址:https://github.com/DavidGillsjo/VideoIMUCapture-Android/releases
棋盘标定板下载
链接: https://pan.baidu.com/s/1wiPJsEf87Vc0D7KwJnt3GA?pwd1234
提取码: 1234 过程
1.使用下载的软件录制一段视频&am…
图像预处理技术与算法
图像预处理是计算机视觉和图像处理中非常关键的第一步,其目的是为了提高后续算法对原始图像的识别、分析和理解能力。以下是一些主要的图像预处理技术:
1.图像增强: 对比度调整:通过直方图均衡化(Histogram Equalization)等方法改善图像整体或局部的对比度。 伽玛校正:…

相机图像质量研究(39)常见问题总结:编解码对成像的影响--运动模糊
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

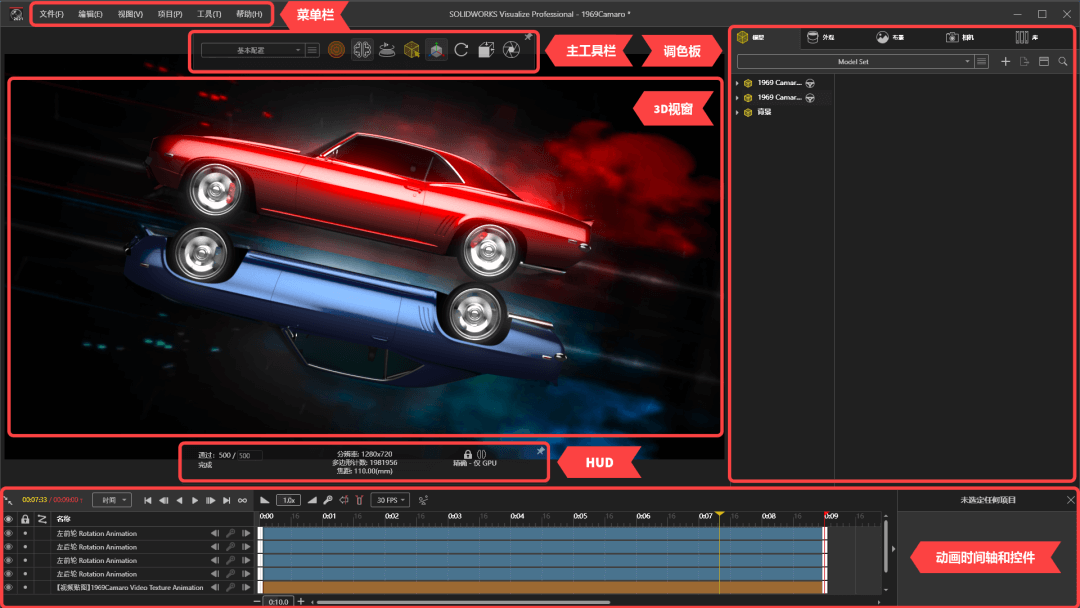
SOLIDWORKS Visualize 界面介绍
现在有越来越多的朋友在工作中选择使用SOLIDWORKS Visualize正版软件,这真是太棒了!这次的主题是小索带大家了解SOLIDWORKS Visualize界面,让更多的朋友快速的熟悉SOLIDWORKS Visualize界面。 【菜单栏】位于界面的顶端,菜单栏包含多个下拉菜…

Lafida多目数据集实测
Lafida 数据集
paper:J. Imaging | Free Full-Text | LaFiDa—A Laserscanner Multi-Fisheye Camera Dataset 官网数据:https://www.ipf.kit.edu/english/projekt_cv_szenen.php 官网:KIT-IPF-Software and Datasets - LaFiDa 标定数据下载&…

极简7照训练法,奇趣相机引领儿童AI摄影潮流
近日,奇趣未来推出一款专注于儿童AI摄影市场的微信小程序——奇趣相机,搭载了专为中国儿童精心研发的AIGC大模型,精准捕捉并贴合亚洲儿童人脸特征,让每一个孩子的笑容都能被完美定格。它不仅涵盖了从3岁至12岁各个年龄段的儿童摄影…
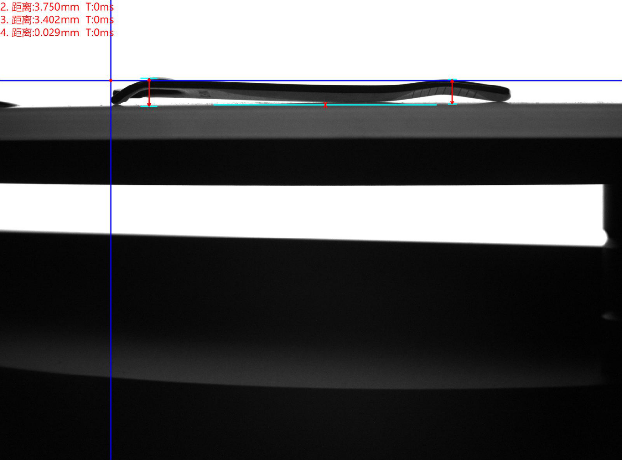
高效准确!指甲剪盖片视觉检测技术解密
指甲剪的盖片是指指甲剪的一端,通常用来盖住另一端的刀刃部分。指甲剪盖片是指甲剪的重要部分,除了保护刀刃外,还起到美观和便捷的作用。正确使用和保养指甲剪盖片可以延长指甲剪的使用寿命。 本案是对指甲剪盖片最大尺寸长75mm*宽10mm*高3mm…
理解Three.js的相机
大家都知道我们生活中的相机,可以留下美好瞬间。那Three.js的相机是什么呢?Three.js创建的场景是三维的,而我们使用的显示器显然是二维的,相机就是抽象的定义了三维空间到二维显示器的投影方式。Three.js常见的相机有两类…

USB4 C母 Docking设计PCBA简单性能测试
一:设备需求 USB4 PCBA 主板;1台Type-C笔记本 ;1个PD诱骗器 ;1个DC电源20V 10A;1个3.5耳机;2条C to C全功能线(带Emarker);2个U盘(USB-A 口)&…
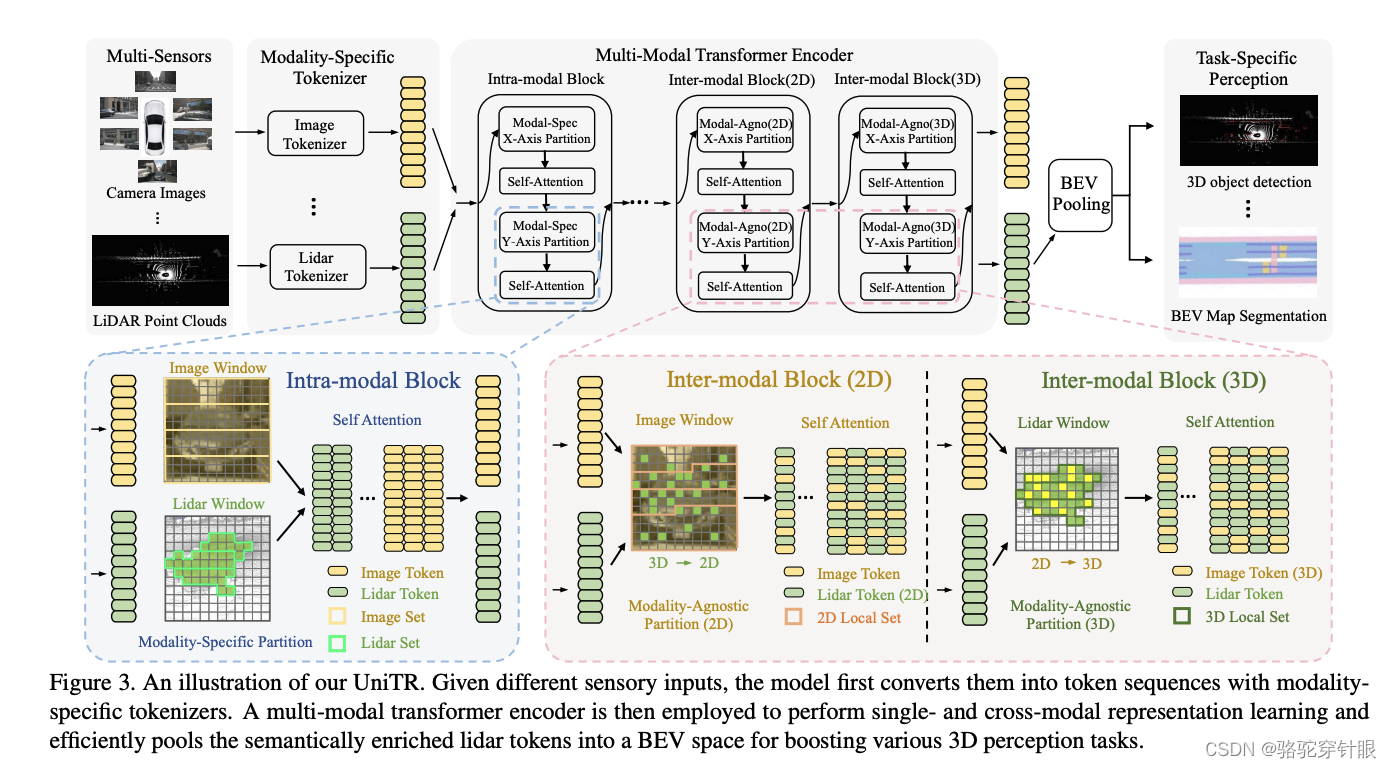
BEV的多传感器融合方案
多模态融合 早期融合(Early Fusion)晚期融合(Late Fusion)深度融合(Deep Fusion) BEVFusion - MITBEVFusion - 阿里&北大UniTR 感知技术中相机和雷达数据融合方法的概述,这些方法分别是早期…
ids工业相机与电控位移台同步控制及数据采集
通过VS2017和OpenCV,实现ids工业相机与电控位移台同步控制及数据采集 目录项目环境配置代码流程及思路项目架构项目开发运行效果开发关键ids相机配置位移台环境配置相机头文件相机参数设置保存图像函数设置电控位移台头文件电控位移台设置参数最后就是通过main函数进行调用和控…
碘浊度法与红外相机联用测定食品中维生素C
🌞欢迎来到看论文的世界 🌈博客主页:卿云阁 💌欢迎关注🎉点赞👍收藏⭐️留言📝 🌟本文由卿云阁原创! 📆首发时间:🌹2024年4月6日&…

相机标定——四个坐标系介绍
世界坐标系(Xw,Yw,Zw)
世界坐标系是一个用于描述和定位三维空间中物体位置的坐标系,通常反映真实世界下物体的位置和方向。它是一个惯性坐标系,被用作整个场景或系统的参考框架。在很多情况下,世界坐标系被认为是固定不变的,即它…

YOLOV9 + 双目测距
YOLOV9 双目测距 1. 环境配置2. 测距流程和原理2.1 测距流程2.2 测距原理 3. 代码部分解析3.1 相机参数stereoconfig.py3.2 测距部分3.3 主代码yolov9-stereo.py 4. 实验结果4.1 测距4.2 视频展示 相关文章 1. YOLOV5 双目测距(python) 2. YOLOv7双目…
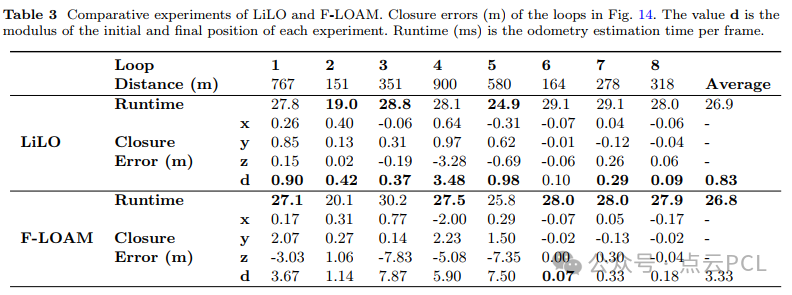
LiLO:基于深度图滤波的轻量且低偏差的激光雷达里程计方法
文章:LiLO: Lightweight and low-bias LiDAR Odometry method based on spherical range image filtering
作者: Edison P. Velasco-Sanchez, Miguel Angel Mu˜noz-Ba˜non,
Francisco A. Candelas, Santiago T. Puente and Fernando Torres.
编辑&…
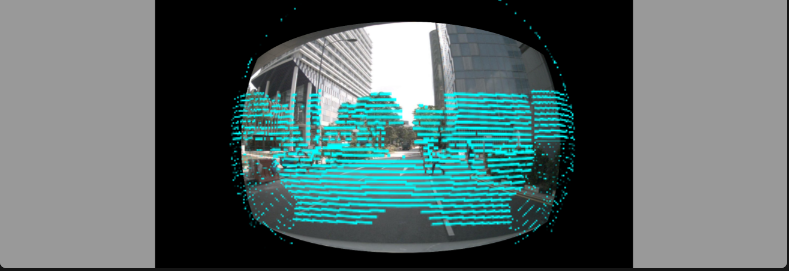
Three.js真实相机模拟
有没有想过如何在 3D Web 应用程序中模拟物理相机? 在这篇博文中,我将向你展示如何使用 Three.js和 OpenCV 来完成此操作。 我们将从模拟针孔相机模型开始,然后添加真实的镜头畸变。 具体来说,我们将仔细研究 OpenCV 的两个失真模…

【Unity每日一记】(Canvas的相机渲染模式) 如何将模型显示在UI之前
👨💻个人主页:元宇宙-秩沅
👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅!
👨💻 本文由 秩沅 原创
👨💻 收录于专栏:uni…
针孔相机、鱼眼相机、全景相机
先进性简述,后续慢慢会补充1. 针孔相机:
针孔相机是一种基于针孔成像原理的传统相机,它使用一个非常小的孔径(即“针孔”)来限制光线进入相机的方式。 这种相机通常具有简单的结构,由一个孔径较小的光学元…
![激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍](https://img-blog.csdnimg.cn/c05a01bbfcc248d0b7a11829031b5869.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5pif5YWJ5oqA5pyv5Lq6,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍
激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍 写在前面安装过程调试过程标定成功可视化展示 写在前面
激光雷达和相机联合标定工具 论文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp&arnumber9564700 github地址: https://github.com…
单反相机用sd卡还是cf卡?相机cf卡和sd卡区别
随着科技的进步,单反相机成为了摄影爱好者和专业摄影师的必备工具。而在选择单反相机存储介质时,CF卡和SD卡成为了两种常见的选择。它们各有优缺点,适用于不同的摄影需求和场景。本文将深入探讨单反相机使用SD卡还是CF卡的问题,并…

相机图像质量研究(30)常见问题总结:图像处理对成像的影响--重影
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

相机图像质量研究(35)常见问题总结:图像处理对成像的影响--运动噪声
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
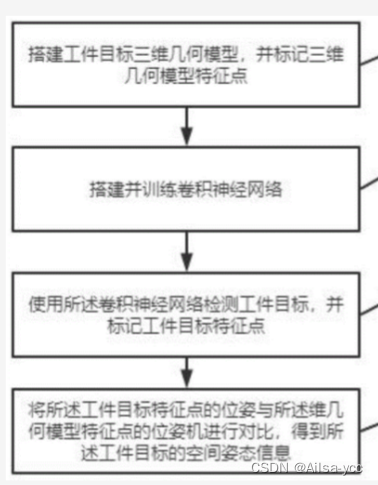
专利:基于2D工业相机的工件目标检测及三维姿态
本发明公开了一种基于2D工业相机的工件目标检测及三维姿态判定方法,首先根据待生产或是待加工工件目标搭建其三维几何模型,并标记该几何模型制定特征点,然后对通过两个2D工业相机分别获得的现场工件目标图像进行目标检测及特征识别࿰…

相机图像质量研究(33)常见问题总结:图像处理对成像的影响--锯齿
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
LabVIEW眼结膜微血管采集管理系统
LabVIEW眼结膜微血管采集管理系统
开发一套基于LabVIEW的全自动眼结膜微血管采集管理系统,以提高眼结膜微血管临床研究的效率。系统集成了自动化图像采集、图像质量优化和规范化数据管理等功能,有效缩短了图像采集时间,提高了图像质量&#…
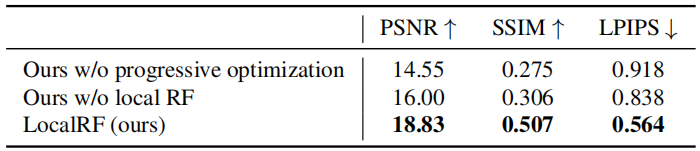
【分块三维重建】【slam】LocalRF:逐步优化的局部辐射场鲁棒视图合成(CVPR 2023)
项目地址:https://localrf.github.io/ 题目:Progressively Optimized Local Radiance Fields for Robust View Synthesis 来源:KAIST、National Taiwan University、Meta 、University of Maryland, College Park
提示:文章用了s…

相机图像质量研究(11)常见问题总结:光学结构对成像的影响--像差
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
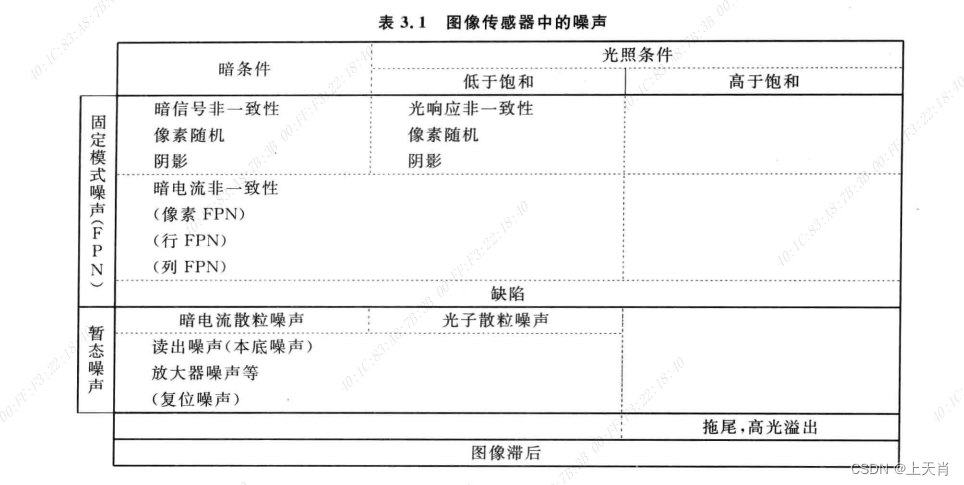
相机图像质量研究(19)常见问题总结:CMOS期间对成像的影响--Sensor Noise
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
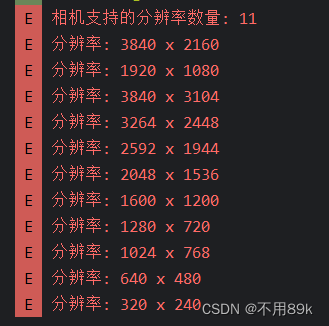
Android 获取USB相机支持的分辨率有多少
直接上代码 private fun getCamera() {// 获取系统相机服务val cameraManager requireContext().getSystemService(Context.CAMERA_SERVICE) as? CameraManagerif (cameraManager ! null) {// 在这里进行相机管理器的操作// 获取相机设备的 ID(这里假设使用第一个相…

ROS相机内参标定详细步骤指南
作者: Herman Ye Galbot Auromix 版本: V1.0 测试环境: Ubuntu20.04 、ROS1 Noetic 更新日期: 2023/09/14 注1: 本文内容中的硬件由 Galbot 提供支持。 注2: Auromix 是一个机器人爱好者开源组织。 注3&…
相机数据恢复!详细步骤解析(2023新版)
和朋友在外面旅游用相机拍了好多有意义的照片和视频,但是导入电脑后不知道是被我删除了还是什么原因,这些照片都不见了,请问有方法恢复吗?” 在数字摄影时代,我们依赖相机记录珍贵的瞬间。然而,相机数据丢失…

HarmonyOS NEXT应用开发—发布图片评论
介绍
本示例将通过发布图片评论场景,介绍如何使用startAbilityForResult接口拉起相机拍照,并获取相机返回的数据。
效果图预览 使用说明
通过startAbilityForResult接口拉起相机,拍照后获取图片地址。
实现思路
创建CommentData类&#…
激光雷达与rgb相机外参标定
1 简介
最近在做livox与rgb相机的外参标定,网上看了很多开源方法大对数是基于ros做的,由于对ros不太熟悉,所以先基于python写一个初始版本,以下是全部代码,后面有有时间再整理,相机的内参是使用matlab工具…

搜维尔科技:OptiTrack 提供了性能最佳的动作捕捉平台
OptiTrack 动画
我们的 Prime 系列相机和 Motive 软件相结合,产生了世界上最大的捕获量、最精确的 3D 数据和有史以来最高的相机数量。OptiTrack 提供了性能最佳的动作捕捉平台,具有易于使用的制作工作流程以及运行世界上最大舞台所需的深度。
无与伦比…
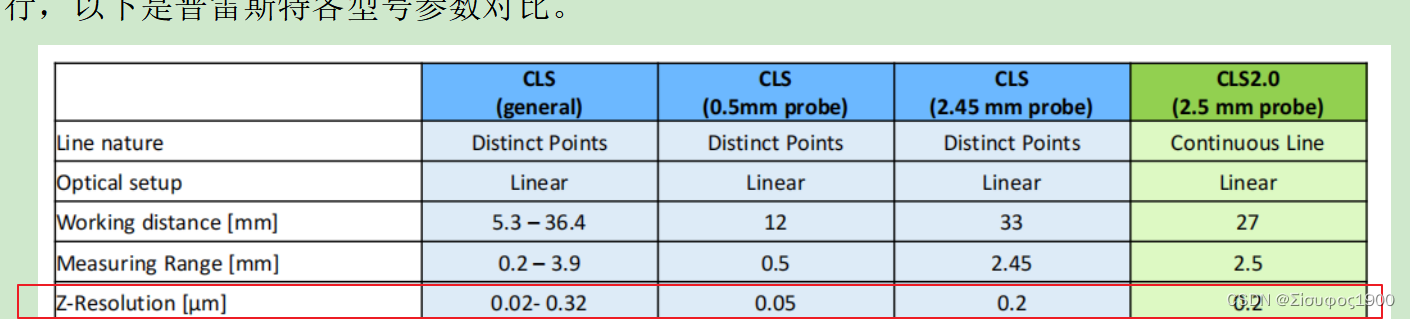
选项 打光 试题总结
试题1 被测物体100100mm,精度要求被测物体 ,精度要求0.1mm,相机距被测物体在200~320mm之间,要求选择合适的相机和镜头? 分析如下:
通常我们用的相机靶面是4:3 的所以我们要用短边来计算视场&am…
unity实现使不同尺寸物体总能较完整的显示在相机范围内
unity通常会有将一个模型展示在界面上用于旋转缩放观察的功能,通常是使用相机看向模型,然后使用RawImage显示相机看到的画面。
但很多时候展示的模型尺寸与中心点是差别较大的,就需要自适应的修改模型的位置使其能够完整的显示在屏幕中心位置…


【论文阅读】多传感器SLAM数据集
一、M2DGR
该数据集主要针对的是地面机器人,文章正文提到,现在许多机器人在进行定位时,其视角以及移动速度与车或者无人机有着较大的差异,这一差异导致在地面机器人完成SLAM任务时并不能直接套用类似的数据集。针对这一问题该团队…
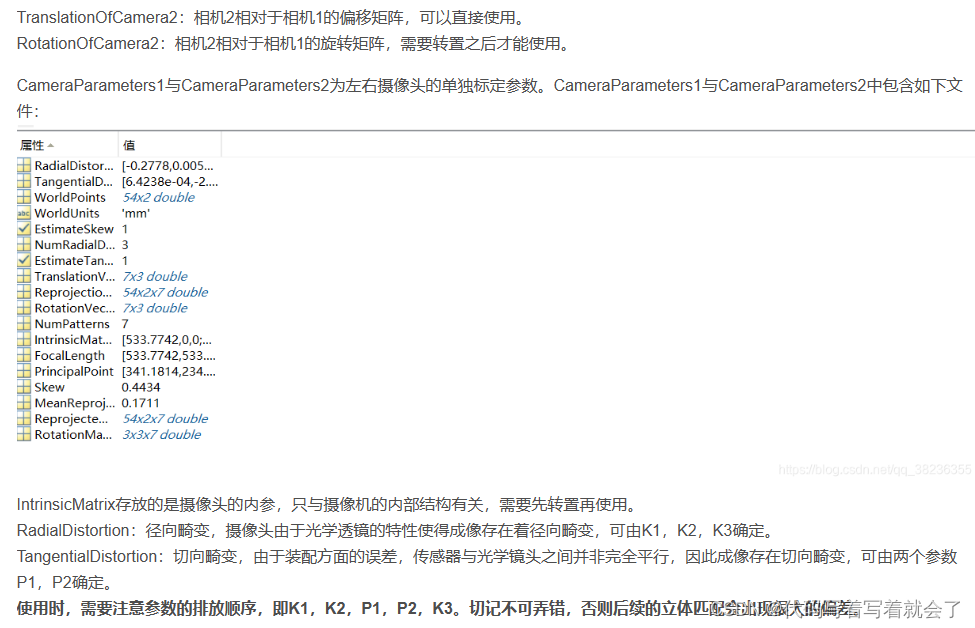
matlab双目相机标定
相机标定目的:获得相机内部参数,从而实现二维到三维的转换。
相机标定方法:opencv 双目相机标定以及立体测距原理及OpenCV实现_opencv stereocalibration原理-CSDN博客
3D视觉(三):双目摄像头的标定与校正_双目标定实验-CSDN博…
GoPro相机使用的文件格式和频率
打开GoPro相机(以11为例),里面是一个DCIM文件夹。 DCIM是digital camera in memory 的简写,即存照片的文件夹,常见于数码相机、手机存储卡中的文件夹名字。
正常手机拍照和视频都是保存在此文件夹的。正常建议不用删,因为只要拍照…
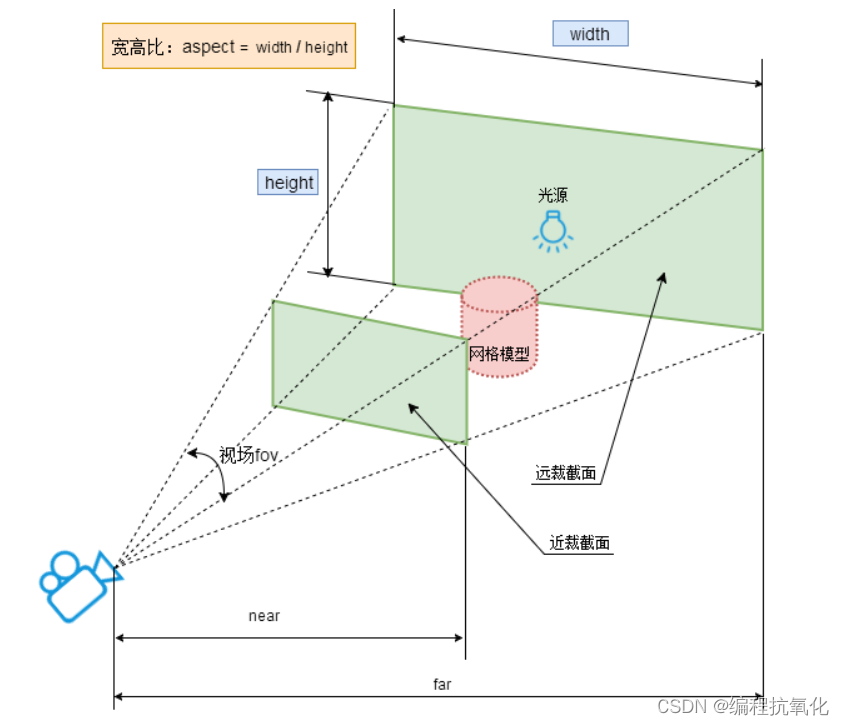
【three.js】Camera相机四大参数详解
先说一个概念,threejs中的相机其实就是一个视椎体,如下图: 两个绿色的面分别是近裁截面和远裁截面,在两个面之间,我们能看到网格模型,如果网格模型在两个面外,那么你是看不到的。
那么明白这一点,我们看代码说明。
这里拿PerspectiveCamera透视投影相机举例:
// 引…
NASA数据集——Two-Dimensional Video Disdrometer (2DVD)二维视频测距仪 (2DVD)数据集
简介
Two-Dimensional Video Disdrometer (2DVD)
测距仪是一种安装在固定地面站平台上的光学设备,用于测量不同类型水文流星(降水)的特性,如雨滴、雪花和冰雹。二维视频测距仪 (2DVD) 使用两台高速线扫描照相机对所有降水颗粒和…
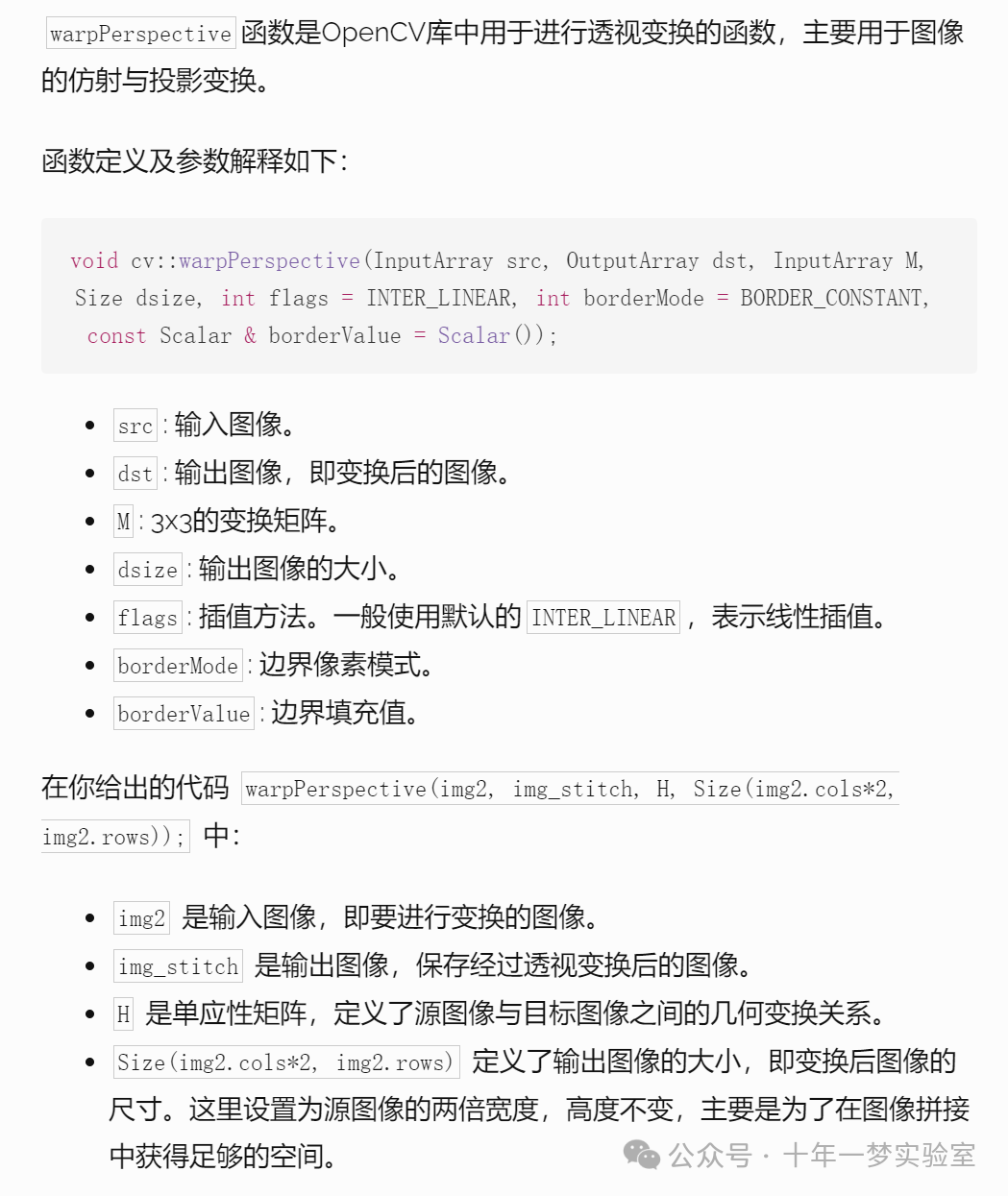
【opencv】教程代码 —features2D(5)旋转相机的基本全景拼接
基本全景拼接 panorama_stitching_rotating_camera.cpp 将第二张图像进行透视变换后与第一张图像拼接 #include <iostream> // 包含了一些用于输入输出的函数
#include <opencv2/core.hpp> // 包含了OpenCV核心库的一些常用类和函数
#include <opencv2/imgpro…

应用案例分享|3D视觉引导汽车铅蓄电池自动化拆垛
在汽车制造及相关配套产业链中,铅蓄电池作为关键零部件之一,其生产和处理环节对效率和精准度都有着极高的要求。传统的铅蓄电池拆垛作业往往依赖于人工操作,不仅效率低下,还存在安全隐患。 项目背景
某大型蓄电池企业,…
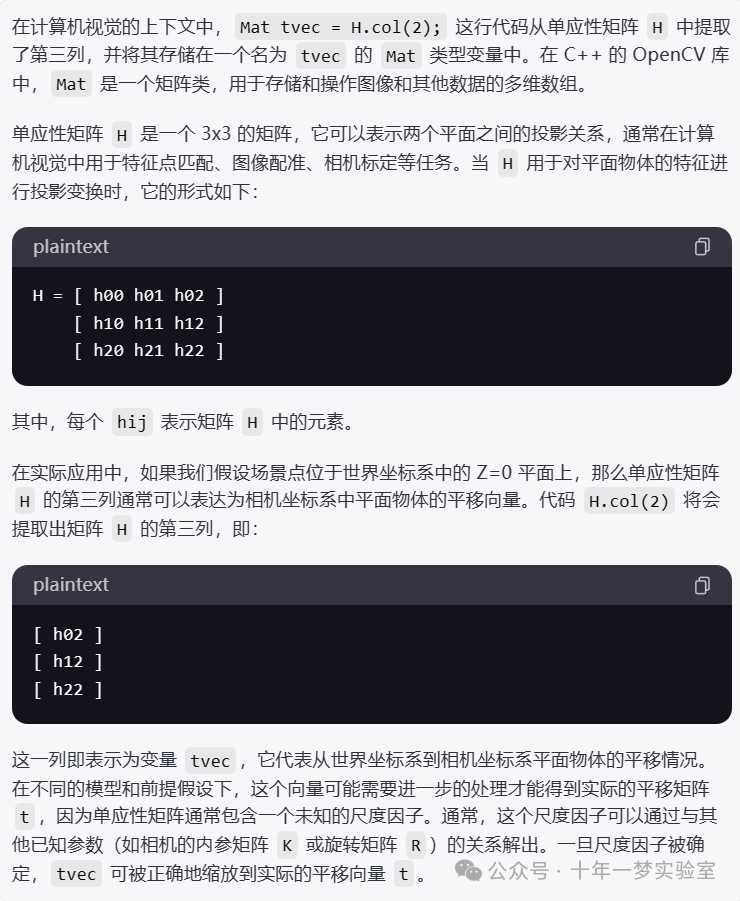
【opencv】教程代码 —features2D(7)根据单应性矩阵估计相机坐标系下的物体位姿...
pose_from_homography.cpp从图像中找到棋盘角点并进行姿态估计 从图像中找到棋盘角点并显示 计算角点在世界坐标系中的位置 读取相机内参和畸变系数并校正图像中的角点 计算从3D点到2D点的单应性矩阵 通过奇异值分解(SVD)优化对旋转矩阵的估计 基于单应矩阵分解及其优化结果&am…

能换发型的相机app有哪些?5款APP帮你一键换发型
能换发型的相机app有哪些?在当前的数字化时代,发型变换不再受限于传统理发店的繁琐流程。只需一款合适的相机app,便能轻松尝试各种新颖发型。这些app凭借先进的图像处理技术,将发型与用户的照片精准融合,实现逼真的换发…
Baumer工业相机堡盟工业相机如何通过NEOAPISDK实现双快门采集两张曝光时间非常短的图像(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPISDK实现双快门采集两张曝光时间非常短的图像(C) Baumer工业相机Baumer工业相机定序器功能的技术背景Baumer工业相机通过NEOAPI SDK使用定序器功能预期的相机动作技术限制定序器的工作原理 Baumer工业相机通过NE…

SHARE 100M PRO:航测领域的多面手
在无人机航测领域,SHARE 100M PRO单镜头航测相机以其1.02亿像素的中画幅传感器和创新技术,正在重塑倾斜摄影的精度和效率。这款相机不仅在城市规划和土地管理中发挥着重要作用,还在环境监测、基础设施建设、农业管理等多个航测领域展现出其卓…

WOODWARD 5466-318 是否打算转向开放的工业以太网协议
WOODWARD 5466-318 是否打算转向开放的工业以太网协议 DCS 供应商是否应该在其骨干网络中使用开放式工业以太网协议标准? 开放式架构网络有很多种,但传统 DCS 供应商拥有并使用自己的封闭式网络。当然,用户在更换系统时可以选择使用具有…

Python 实现海康机器人工业相机 MV-CS050-10GC 的实时显示视频流及拍照功能(实时显示视频流同时可以进行拍照)
参考链接:
https://www.cnblogs.com/HanYork/p/17388506.html
https://www.cnblogs.com/miracle-luna/p/16960556.html#5138211
Flask搭建流媒体服务器:使用Flask搭建一个流媒体服务器_multipart/x-mixed-replace; boundaryframe-CSDN博客
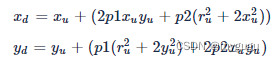
相机相关:相机模型与畸变模型
1. 写在前面
最近在研究相机模型、标定参数相关的内容,因此针对多种相机模型和畸变模型,以及相机坐标系、世界坐标系等等做了一个系统的归纳总结。网上已经有蛮多相关的介绍,这里是基于一个小白的视角进行的归纳梳理,一来是可以帮…
光线追踪6 - Moving Camera Code Into Its Own Class
在继续之前,现在是将我们的相机和场景渲染代码整合到一个新的类中:相机类。相机类将负责两个重要的任务: 1.构建并发射光线到世界中。 2.利用这些光线的结果构建渲染图像。 在这次重构中,我们将收集ray_color()函数以及主程序中的…
直播相机,AI纪元!云犀首款AI直播相机重磅发布!
3月7日晚,云犀重磅发布首款AI直播相机-云犀智瞳Pro!据悉该相机内置了云犀首款AI直播调参大模型,能够通过AI分析智能调节直播间参数,赋予直播间画面AI智能调控能力。 云犀AI直播相机,让直播更简单
此次云犀AI直播相机的…


搜维尔科技:OptiTrack新型动捕相机最大限度地提高远距离精度
新的Primex 120和Slimx 120相机采用了最高分辨率。
3D追踪系统的全球领导者OptiTrack宣布推出三款最先进的运动捕捉相机:Primex120、Primex120W和Slimx120。新的更高分辨率相机提供了OptiTrack所期望的精度,具有更高的分辨率和更大的视野。这些新功能使更大的跟踪区…
UE C++ 相机视口变换(World与相机互转)
UE C 相机视口变换(World与相机互转)
UFUNCTION(BlueprintCallable, BlueprintPure)
static void ProjectSceneCaptureToWorld(const class USceneCaptureComponent2D* SceneCaptureComponent2D,const FVector2D& SceneCapturePosition, FVector&am…

相机图像质量研究(23)常见问题总结:CMOS期间对成像的影响--紫晕
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

元宇宙虚拟空间的场景构造(二)
前言
该文章主要讲元宇宙虚拟空间的场景构造,基本核心技术点,不多说,直接引入正题。 场景的构造
使用引入的天空模块
this.sky new Sky(this);
在Sky模块里,有设置对其中的阳光进行不同时间段的光线处理。而天空又是怎么样的…
像素、分辨率、公差的概念
像素 (Pixel)
像素是指在由一个数字序列表示的图像中的一个最小单位。像素的多少表明相机所含有的感光元件的多少。所谓 200 万像素 CCD 就是一个由 200 万个光电二极管构成的集合体。一台100万像素的相机拍摄的照片洗成5寸比洗成六寸清晰点。80万 1024…

相机图像质量研究(25)常见问题总结:CMOS期间对成像的影响--过曝、欠曝
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…

Godot 4 教程《勇者传说》依赖注入 学习笔记(1):相机使用
文章目录 相关地址扩大场景添加相机相机拖动相机平滑相机限制不进行限制进行限制左边轴移动,得到坐标填入坐标限制平滑 相关地址 十分钟制作横版动作游戏|Godot 4 教程《勇者传说》#0 人物素材 环境素材 Gclove2000/GodotNet_LegendOfPaladin 扩大场景
…

YOLOV8 + 双目测距
YOLOV8 双目测距 1. 环境配置2. 测距流程和原理2.1 测距流程2.2 测距原理 3. 代码部分解析3.1 相机参数stereoconfig.py3.2 测距部分3.3 主代码yolov8-stereo.py 4. 实验结果4.1 测距4.2 测距跟踪4.3 测距跟踪分割4.4 视频展示 相关文章 1. YOLOv5双目测距(python&…
索尼相机照片清理软件
在使用索尼相机拍摄照片的时候有时我们需要同时拍摄JPG格式和RAW格式,这在后期选图的时候给我们带来一些麻烦。我们固然可以选用Br来管理照片,但是现在我们可以有一个更轻量的软件(8.8MB)来做到一部分功能。 我们将照片从SD卡导出…
使用rs-enumerate-devices -c来查看D435i可支持的分辨率和内外参
参考自:用rs-enumerate-devices -c命令可以查看D435i所有可以支持的分辨率,帧率,所有的相机内参外参,以下是我的学习记录 realsense的相机来实现的算法其实还是有很多的,所以要对它非常的熟悉才行。 使用rs-enumerate-devices -c命…
大恒相机-程序异常退出后显示被占用
心跳时间代表多久向相机发送一次心跳包,如果超时则设备会认为断开了,停止工作并主动释放占用资源。 在相机打开后添加代码:
#ifdef _DEBUG//设置心跳超时时间 3sObjFeatureControlPtr->GetIntFeature("GevHeartbeatTimeout")-&…
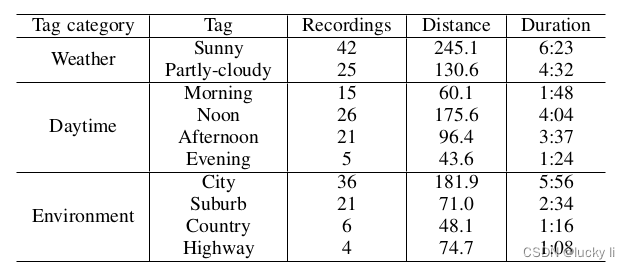
Brno Urban 数据集
简介
提供了来自四个WUXGA摄像机、两个3D激光雷达、惯性测量单元、红外相机具有厘米级精度的差分RTK GNSS接收器的数据350多公里的行驶记录,在捷克共和国布尔诺及其周边地区记录的城市数据集多样化的环境——从高速公路到农村道路,从密集建筑区到树林&a…
基于OptiTrack跟踪系统和Turtlebot机器人的视觉SLAM定位评估
本文旨在介绍使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验的详细流程,包括实验平台搭建过程、数据处理过程以及SLAM估计评估方法。由于涉及知识较多,部分内容只给出了相关参考博文链接。
1 实验平台搭建
实验平台包括OptiTrack光学…
6 个最值得使用的 iPad 数据恢复软件
在iPad上遇到数据丢失可能会令人痛苦,无论是由于意外删除还是设备问题。好消息是,存在可靠的解决方案。使用正确的iPad数据恢复软件,检索宝贵的数据不仅是可能的,而且通常很简单。本指南重点帮助您选择最合适的恢复软件࿰…
【教程】autojs使用Intent打开相机拍照并指定存储路径
转载请注明出处:小锋学长生活大爆炸[xfxuezhang.cn] var photoPath "/sdcard/a.jpg";
var photoFile new java.io.File(photoPath);
if (!photoFile.exists()) {photoFile.getParentFile().mkdirs();}
try {photoFile.createNewFile();
} catch (e) {to…

相机图像质量研究(12)常见问题总结:光学结构对成像的影响--炫光
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
【Unity自制手册】Unity—Camera相机跟随的方法大全
👨💻个人主页:元宇宙-秩沅
👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅!
👨💻 本文由 秩沅 原创
👨💻 收录于专栏:Uni…
机器视觉系统选型-相机基础知识
相机基础知识: 分辨率(Resolution):相机采集图像的像素点数 像素分辨率(mm/pixel):每个像素代表的毫米值 快门方式: 全局快门/全域快门(Global Shutter):让整个感光元器件每行像素全部在同一时间…
小程序调用相机拍照上传
用的wpy框架,有this,原声小程序就按照你们的调方法就行了 //打开相机openCream() {const _this this;wx.showActionSheet({itemList: ["拍照"],//[拍照,相册]itemColor: "",//成功时回调success: function(res) {if (!res.cancel) …
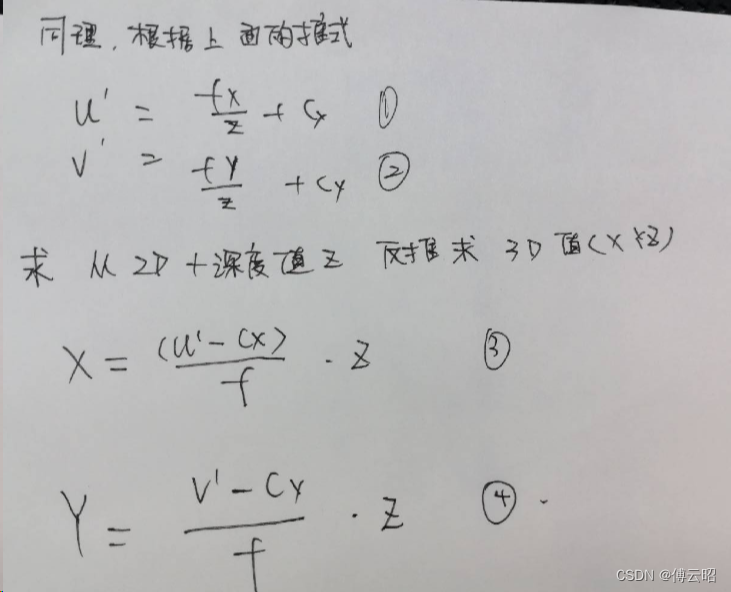
从相机空间到像素空间的投影和反投影原理和代码
目录
从相机空间到像素空间的投影 效果
编辑 公式
编辑 代码 像素空间到相机空间的反投影 记录一下从相机空间到像素空间的投影(3D-->2D)和像素空间到相机空间的反投影(2D-->3D)。
推荐blog:SLAM入门之视…
光速论文能用吗 #媒体#知识分享#学习方法
光速论文是一个非常有效的论文写作、查重降重工具,它的使用非常简单方便,而且功能强大,是每个写作者必备的利器。 首先,光速论文具有强大的查重降重功能,能够快速检测论文中的抄袭部分,帮助作者避免不必要的…

PointerLockControls 是 Three.js 中用于处理鼠标锁定状态下的相机控制的类。它允许用户通过鼠标移动来控制相机的旋转方向。
demo案例
PointerLockControls 是 Three.js 中用于处理鼠标锁定状态下的相机控制的类。它允许用户通过鼠标移动来控制相机的旋转方向。下面是它的详细讲解: 构造函数:
PointerLockControls(object: Camera, domElement?: HTMLElement)object:THREE.Ca…

FPGA高端项目:解码索尼IMX390 MIPI相机转HDMI输出,提供FPGA开发板+2套工程源码+技术支持
目录 1、前言2、相关方案推荐本博主所有FPGA工程项目-->汇总目录我这里已有的 MIPI 编解码方案 3、本 MIPI CSI-RX IP 介绍4、个人 FPGA高端图像处理开发板简介5、详细设计方案设计原理框图IMX390 及其配置MIPI CSI RX图像 ISP 处理图像缓存HDMI输出工程源码架构 6、工程源码…
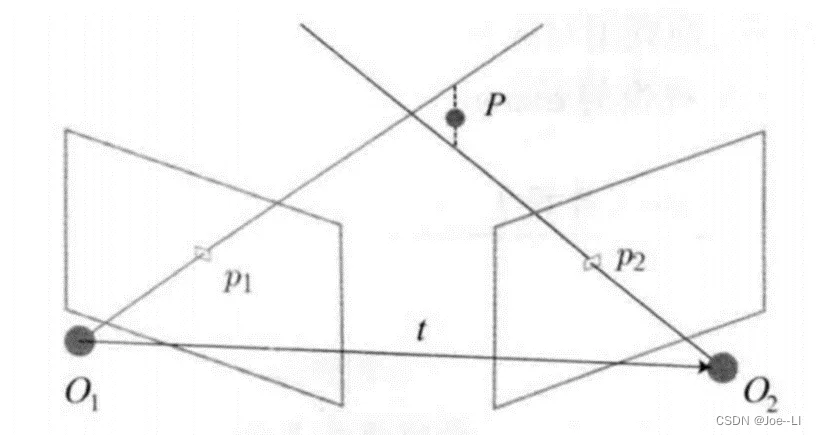
视觉里程计之对极几何
视觉里程计之对极几何
前言
上一个章节介绍了视觉里程计关于特征点的一些内容,相信大家对视觉里程计关于特征的描述已经有了一定的认识。本章节给大家介绍视觉里程计另外一个概念,对极几何。
对极几何
对极几何是立体视觉中的几何关系,描…

单摄像头、双目摄像头、多视图系统:了解自动驾驶汽车的传感器
1.鱼眼摄像机 其他摄像机的位置
2.激光雷达 3.Radar 4.sonar 声纳
各个传感器的对比 相机类型
一般来说,相机可以分为单目相机、双目相机和多视角相机。
单目相机:最常见的相机类型,只有一个镜头。双目相机:有两个镜头&…
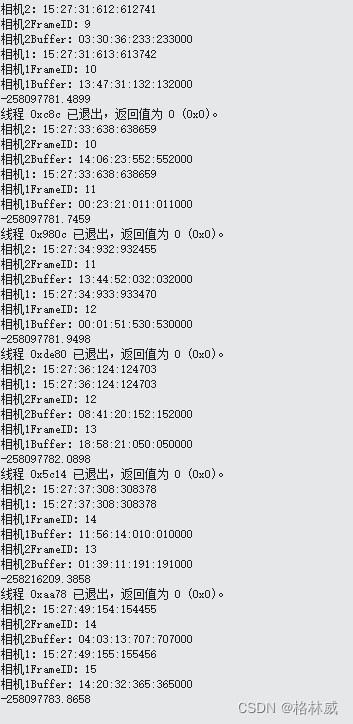
Baumer工业相机堡盟工业相机如何使用BGAPISDK对两个万兆网相机进行硬件触发同步(C++)
Baumer工业相机堡盟工业相机如何使用BGAPISDK对两个万兆网相机进行硬件触发同步(C) Baumer工业相机Baumer工业相机BGAPISDK和触发同步的技术背景Baumer工业相机使用BGAPISDK进行双相机主从相机触发1.引用合适的类文件2.使用BGAPISDK设置主相机硬件触发从…
佩戴舒适的蓝牙耳机有哪些品牌?不伤耳的蓝牙耳机推荐
真无线蓝牙耳机逐渐成为大家日常必不可少的数码产品,也随着耳机的发展,人们对蓝牙耳机的要求也越来越高,不仅音质要好,长时间佩戴也要舒适,更是能够应用于多种场景中使用,但挑选蓝牙耳机也是一门学问&…
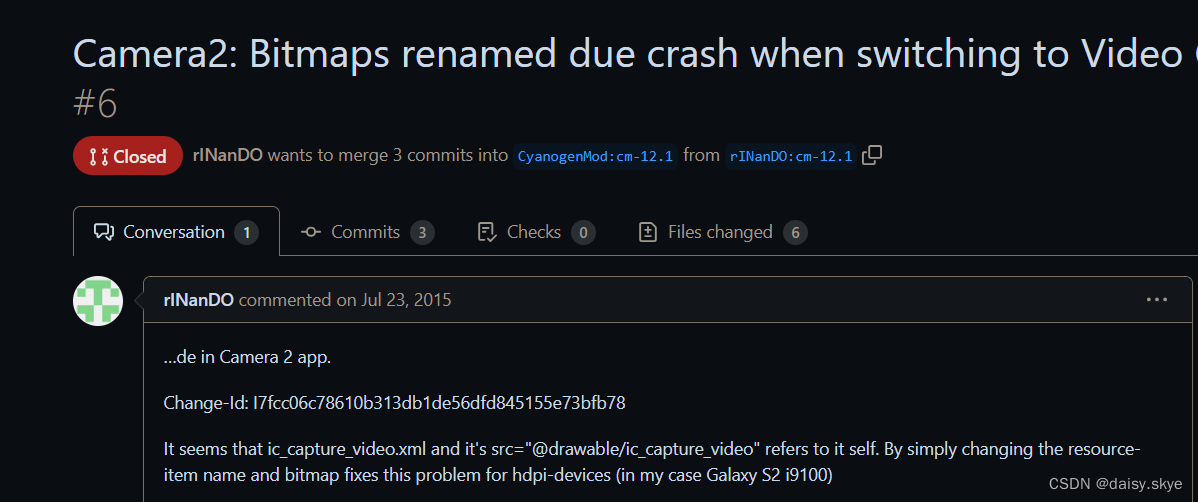
安卓7原生相机切到视频崩溃
目录
1、查看日志
2、分析日志、提取重点
3、寻找解决方法 author daisy.skye的博客_CSDN博客-嵌入式,Qt,Linux领域博主 daisy.skye_嵌入式,Linux,Qt-CSDN博客daisy.skye擅长嵌入式,Linux,Qt,等方面的知识https://blog.csdn.net/qq_40715266?typeblog
1、查看日志 由于安…

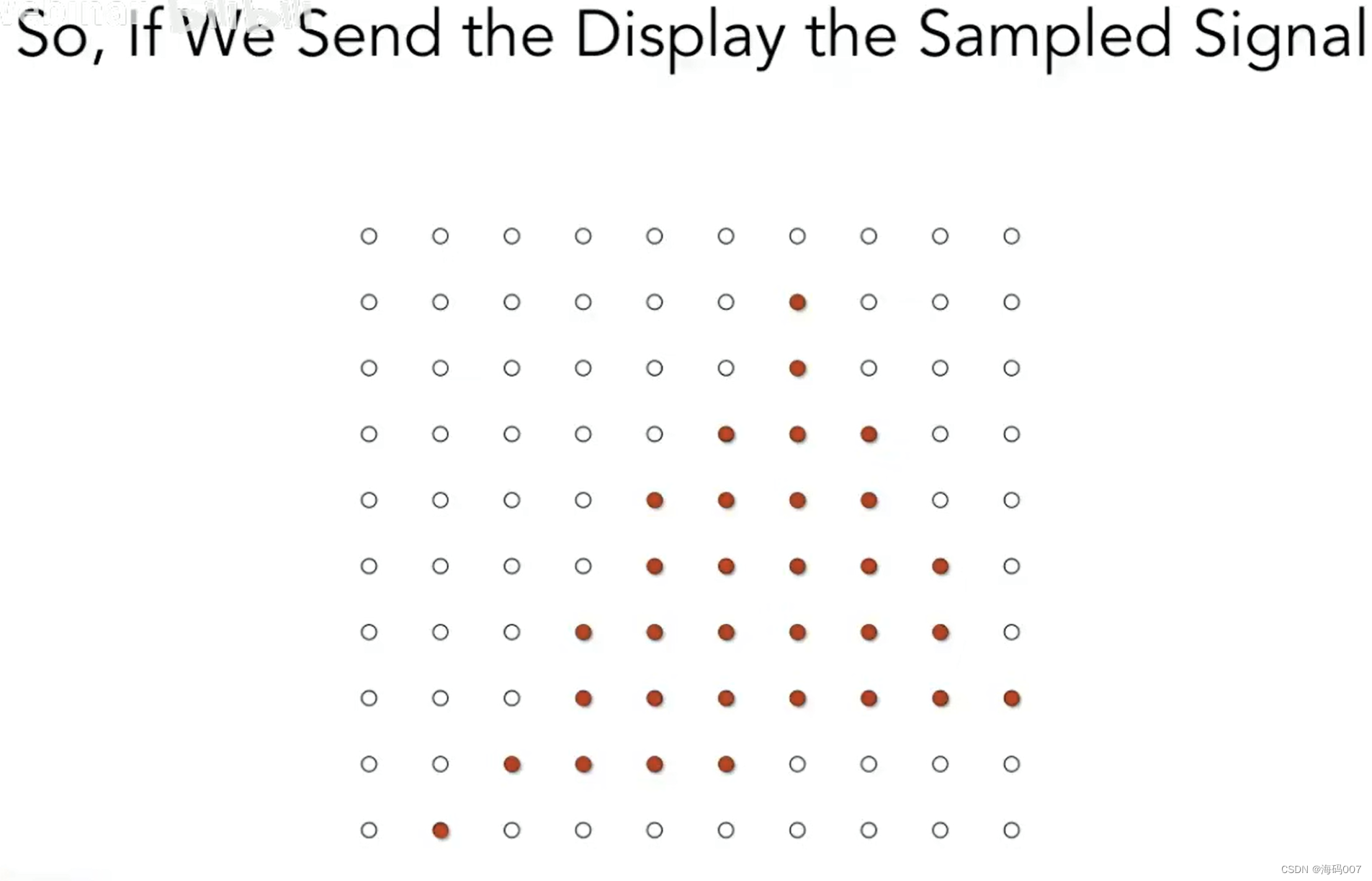
【GAMES101】Lecture05 Rasterizaion 1 (Triangles) 光栅化之三角形
目录 0 引言1 MVP后要做什么呢?1.1 MVP是什么1.2 Canonical Cube to Screen 标准立方体到屏幕1.3 Rasterizing Triangles into Pixels 将三角形光栅化为像素 2 Rasterization:Drawing to Raster Display2.1 Polygon Meshes2.2 Triangle Meshes2.3 Triang…
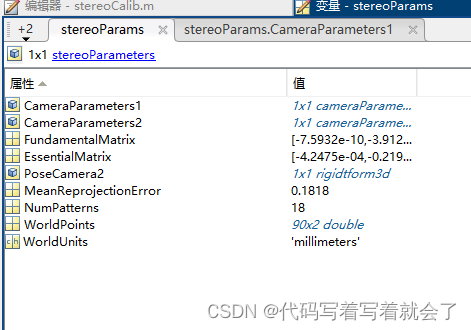
matlab双目相机标定-需要什么参数、怎么获得
相机标定目的:获得相机内参、外参、畸变系数,摄像头的内参(f,1/dx,1/dy,cx,cy)、畸变参数(k1,k2,k3,p1,p1)和外参(R,t),用于接下来的双目校正和深度图生成从而实现二维到三维的转换。
相机标定方法:opencv 双目相机标定以及立体…

航测管家:智能化革新航测作业流程
在信息时代的浪潮中,倾斜摄影作为一种高效的航测技术,对于城市规划、土地管理、环境监测等领域的重要性日益凸显。然而,航测作业中的数据管理和设备操作复杂性一直是行业面临的挑战。深圳赛尔智控推出的赛尔航测管家,凭借其智能化…
海康威视相机SDK二次开发(JAVA语言)
目录 前言客户端创建虚拟相机示例代码保存图片程序运行结果修改需求 二次开发引入外部包对SaveImage.java文件进行修改保存图片saveDataToFile方法选择相机chooseCamera方法主方法 FileUtil类处理过期照片启动类与配置文件application.yml通过实体类读取yml启动类 SaveImage.ja…

3d模型显示透视怎么解决--模大狮模型网
如果在显示3D模型时遇到透视问题,可以尝试以下方法来解决: 调整相机参数: 透视问题可能是由相机参数设置不正确引起的。尝试调整相机的视角、焦距和远近平面等参数,以获取更合适的透视效果。可以尝试增大视角值或者拉远远近平面&a…

基于openCV实现的单目相机行人和减速带检测
概述
在计算机视觉项目中,相机标定是一项至关重要的任务,因为它可以校正相机内部参数,消除因镜头畸变等因素导致的图像失真,从而提高后续图像处理和分析的精度。在这个项目中,相机标定的核心功能集成在名为calibratio…
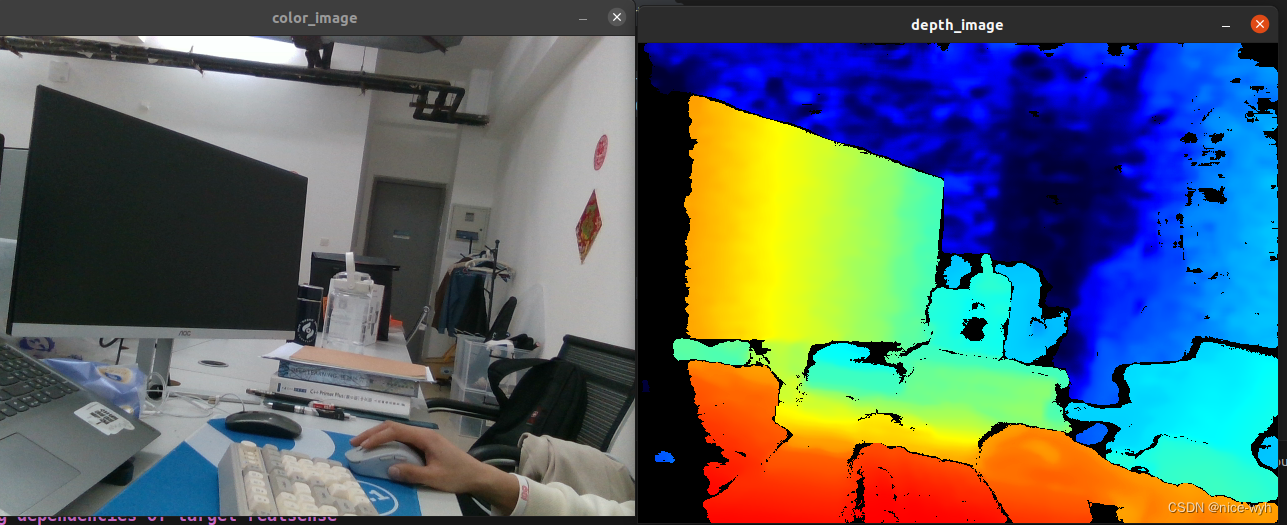
Realsense 相机SDK学习(一)——librealsense使用方法及bug解决(不使用Ros)
一.介绍
realsense相机是一个intel开发出来的一款深度相机,我之前使用他来跑过slam,也配置过他的驱动,在此附上realsense的相机驱动安装方法:Ubuntu20.04安装Intelrealsense相机驱动(涉及Linux内核降级)
…

LabVIEW多表位数字温湿度计图像识别系统
LabVIEW多表位数字温湿度计图像识别系统
解决数字温湿度计校准过程中存在的大量需求和长时间校准问题,通过LabVIEW开发平台设计了一套适用于20多个表位的数字温度计图像识别系统。该系统能够通过图像采集、提取和处理,进行字符训练,从而实现…
在OAK-D S2相机上应用ORB_SLAM3
文章目录 ROS1 noetic + depthai_rosORB_SLAM3什么是ORB_SLAM3怎么安装运行ROS1 noetic + depthai_ros
目前X86和arch64平台测试安装包没有问题。
树莓派上安装ROS需要自己编译安装,时间比较长,需要测试的可以到 官网 查看,替换下面安装ROS步骤就可以了。
ubuntu20.04推荐…
Three.js教程:阵列立方体和相机适配体验
推荐:将NSDT场景编辑器加入你的3D工具链
其他系列工具:NSDT简石数字孪生
阵列立方体和相机适配体验
本节课通过阵列一片立方体,进一步体验下透视投影相机的投影规律。
for循环创建一列模型
const geometry new THREE.BoxGeometry(100, …
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置多帧采集模式(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置多帧采集模式(C) Baumer工业相机Baumer工业相机BGAPISDK和多帧采集模式的技术背景Baumer工业相机通过BGAPISDK设置多帧采集模式功能1.引用合适的类文件2.通过BGAPISDK设置多帧采集模式功能 Baumer工业相机…
Unity(第十六部)声音和视频
声音
1、听声音 创建相机的时候,相机自带Audio Listener 多个相机的时候,我们只保留一个Audio Listener就可以 2、声音源,环境音 添加Audio Source就行中文叫声音源 3、脚本执行的声音
using System.Collections;
using System.Collection…
python+realsense
单目相机(RGB影像):分辨率:320180,320240,424240,640360,640480,848480,960540,1280720,19201080;帧率:6,15,30,60
按照博文Python实战之Realsense_realsense python-CSDN博客的代码显示如下(我更改了分辨率和帧率,大…
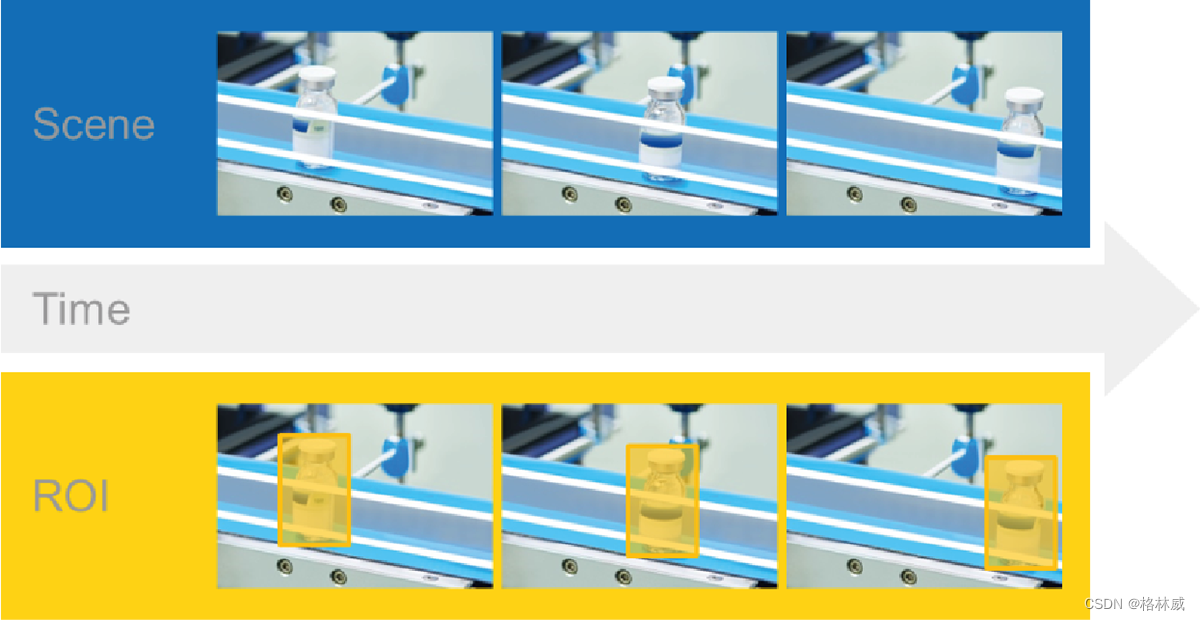
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现根据每次触发信号移动感兴趣区域ROI(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现根据每次触发信号移动感兴趣区域ROI(C) Baumer工业相机Baumer工业相机定序器功能的技术背景Baumer工业相机通过NEOAPI SDK使用定序器功能预期的相机动作测试的图像效果 Baumer工业相机通过NEOAPI SDK使…

相机拍照与摄影学基础
1.相机拍照
相机可能形状和大小不同,但基本功能相同,包括快门速度、光圈和感光度,这些是摄影的通用概念。即使是一次性相机也是基于这三个理念工作的。不同类型相机在这三个概念上的唯一区别是你可以控制这些功能的程度。这三个参数被称为相…
【三维重建】【slam】【分块重建】LocalRF:逐步优化的局部辐射场的鲁棒视图合成
项目地址:https://localrf.github.io/ 题目:Progressively Optimized Local Radiance Fields for Robust View Synthesis 来源:KAIST、National Taiwan University、Meta 、University of Maryland, College Park
提示:文章用了s…
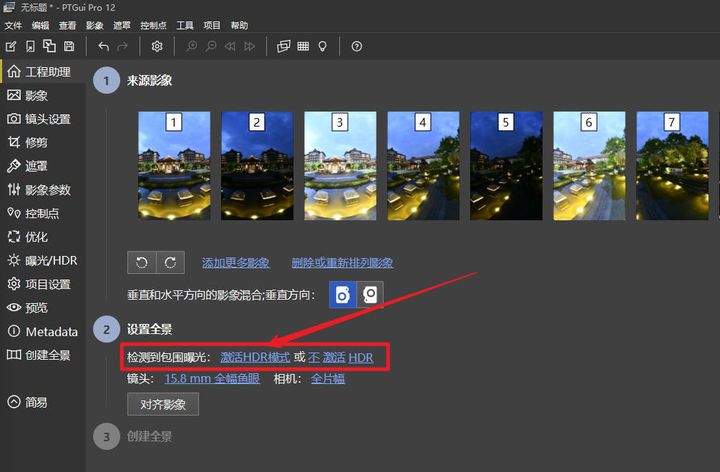
VR全景HDR拍摄教程
什么是HDR? HDR可以用在哪里?
书面解释:HDR(高动态范围 High Dynamic Range)摄影,是摄影领域广泛使用的一种技术。
是不是有点懵? 我们来看一个实际的拍摄现场环境,你就懂了
我们…
Android下载到本地 系统相机扫描到本地相册问题处理
1、申请文件读写权限(可自己写,可使用第三方) 2、在指定目录下创建一个.nomedia文件,注:是文件,不是文件夹 3、.nodedia文件创建好之后需要重启一下系统,之后再进相册就不会显示出该目录下的图片…

Python——添加照片边框
原图: 添加边框后:
添加边框会读取照片的exif信息如时间、相机型号、品牌以及快门焦段等信息,将他们显示在下面的边框中。
获取当前py文件路径
import os
#get path that py file located
def Get_Currentpath():file_path os.path.abspa…
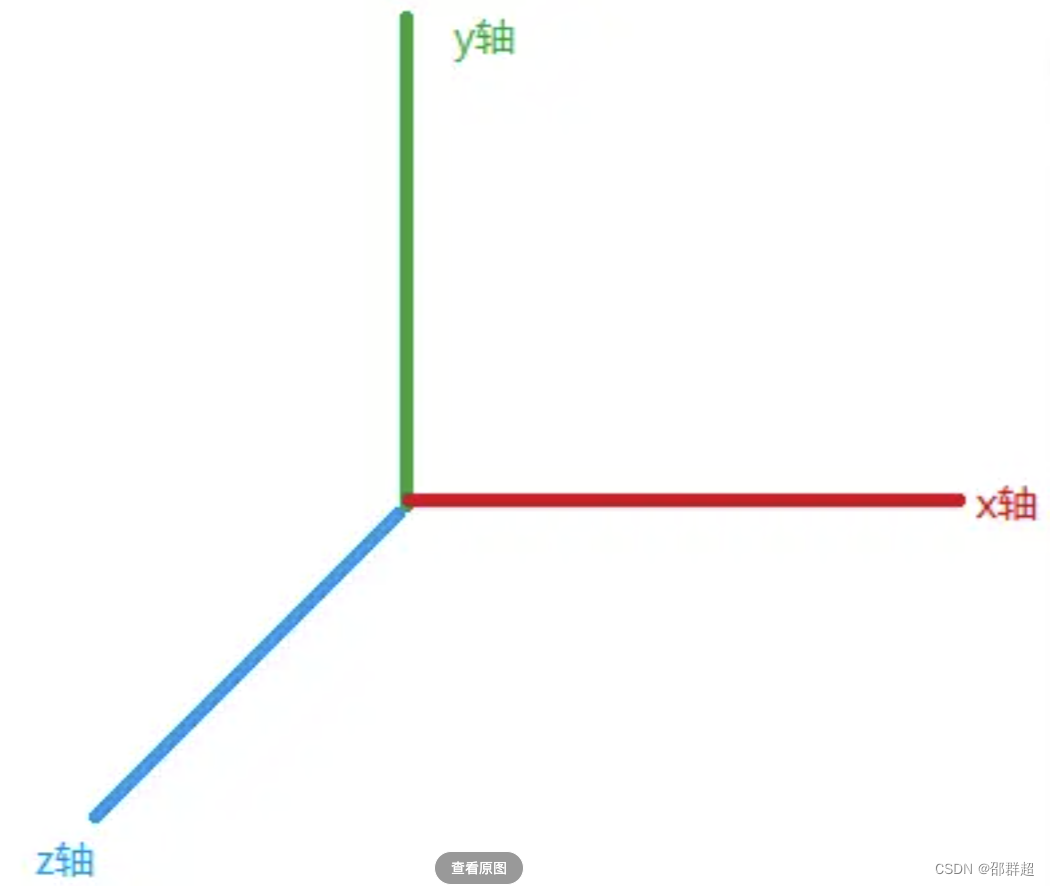
《一》在Vue中搭建Three.js环境(超详细、保姆级),创建场景、相机、渲染器
目录 Three.js简介创建vue项目引入Three.js实际操作环节文件目录创建初始化场景、相机 Three.js简介
Three.js 是一款基于 WebGL的 JavaScript 3D 库,它封装了 WebGL API,为开发者提供了简单易用的 API 来在 Web 浏览器中展示 3D 图形。Three.js 提供了…

3d放上模型为什么渲染不出来---模大狮模型网
如果在3D软件中放置模型后无法正确渲染出来,可能有几个常见的原因导致这种情况发生: 材质设置问题:确保所放置的模型具有正确的材质和纹理,并且材质设置正确。如果材质设置有误,可能会导致模型无法正确显示。
光照设置…
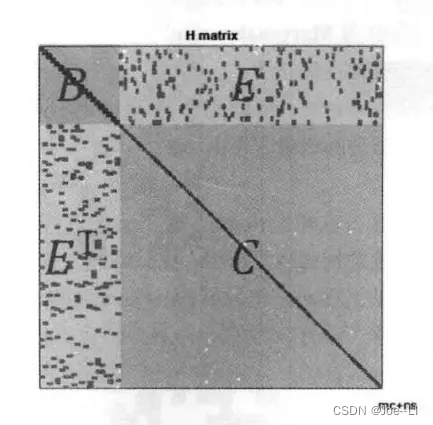

【探讨】光场相机三维重建研究进展与展望
摘要:光场相机利用二维影像同时记录空间中光线的位置和方向信息,能够恢复相机内部的光场,为三维重建提供了新的解决思路。围绕光场相机的三维重建问题,本文综述了光场数据获取手段,梳理和讨论了针对光场相机的标定算法…
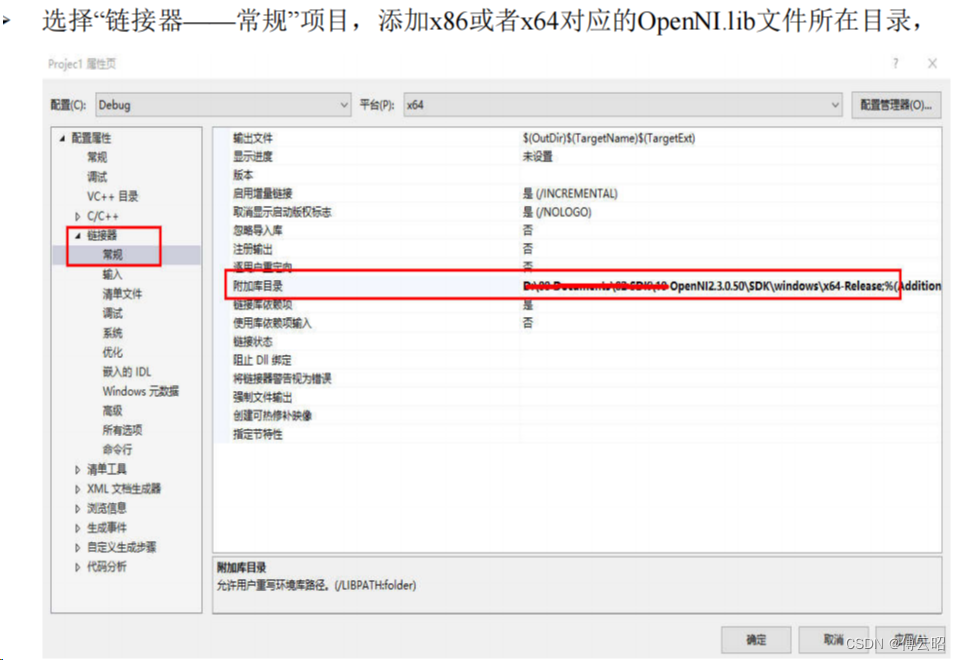
奥比中光Astra SDK相机SDK openni相机成像原理
目录
1.1 成像原理简介
1.1.1 结构光
1.1.2 双目视觉
1.1.3 光飞行时间TOF
2.使用手册
参考网址
2.1 产品集成设计
2.2 SDK介绍与使用
2.3 常用API介绍
OPENNI API
2 OpenNI类(OpenNI.h) 1.1 成像原理简介
1.1.1 结构光
结构光࿰…
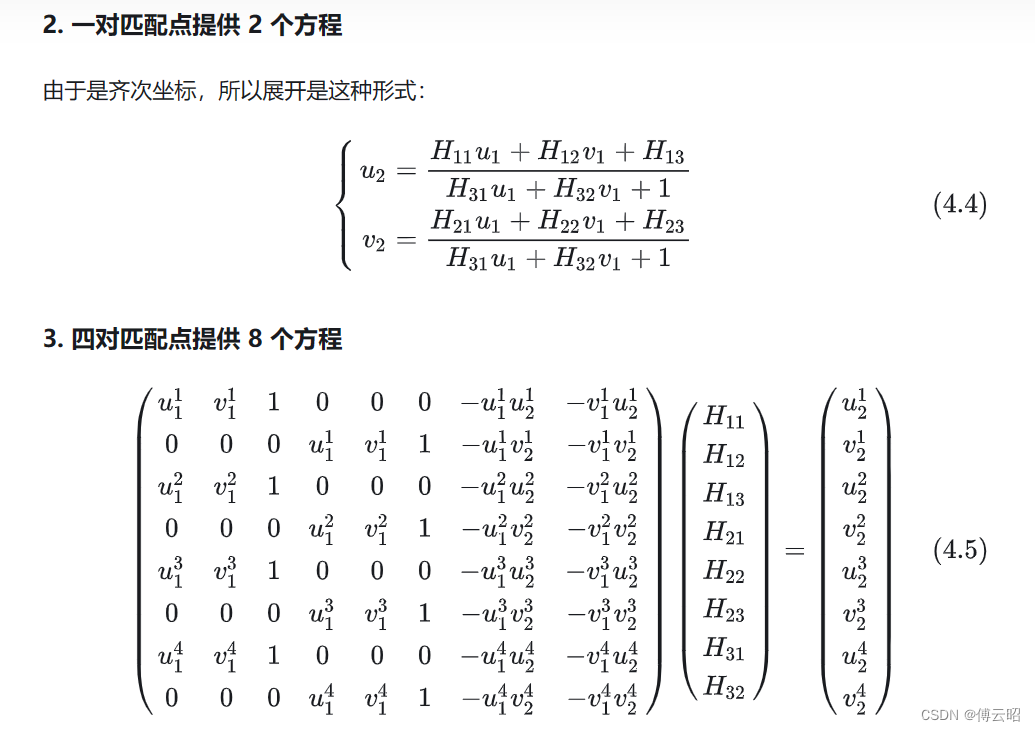
Threejs学习03——实现随机多个三角形随机位置随机颜色展示效果
实现随机多个三角形随机位置随机颜色展示效果
这是一个非常简单基础的threejs的学习应用!本节主要介绍的是随机,随机位置以及随机颜色,我们使用的物体是三角形,通过一个三角形三个顶点每一个顶点通过xyz坐标来确定,则…

《计算机视觉中的多视图几何》笔记(9)
现在进入本书的part 2了,标题是Two-View Geometry。第9-14章都隶属于part 2,这一部分涵盖了两个透视图的几何形状知识,这些视图可以像在立体设备中同时获取,或者例如通过相对于场景移动的相机顺序获取。这两种情况在几何上是等价的…
threejs案例,与静态三角形网格的基本碰撞, 鼠标环顾四周并投球游戏
创建一个时钟对象:
const clock new THREE.Clock();这行代码创建了一个新的THREE.Clock对象,它用于跟踪经过的时间。这在动画和物理模拟中很有用。 2. 创建场景:
const scene new THREE.Scene();这行代码创建了一个新的3D场景。所有的物体(如模型、灯…

Python对接海康威视机器视觉工业相机
一、下载MVS客户端
海康机器人-机器视觉-下载中心 二、解压并安装MVS客户端 三、找到MVS示例代码(代码在MVS的安装位置)
工业相机只允许单条连接,也就是说MVS如果连接了相机,python代码就无法获取数据,此时必须退出M…
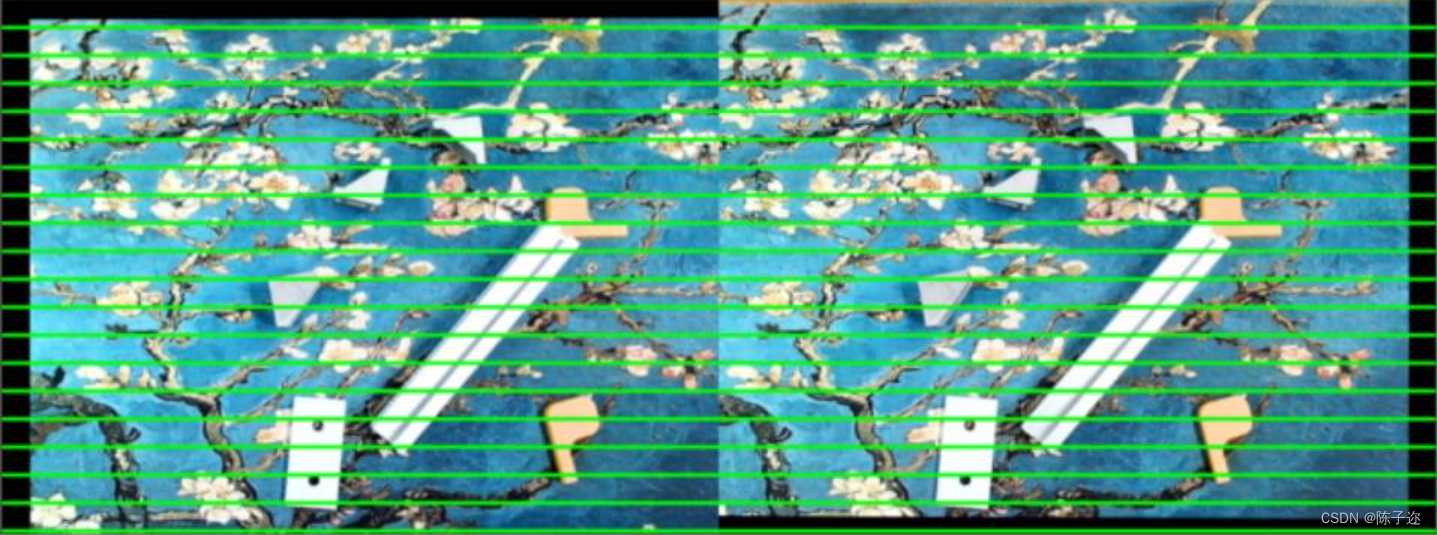
双目项目实战---测距(获取三维坐标和深度信息)
目录 1.简介
2.模块讲解
2.1 立体校正
2.1.1 校正目的
2.1.2 校正方法
2.2 立体匹配和视差计算
2.3 深度计算
3.完整代码 1.简介
双目视觉是一种通过两个摄像机(或者两个镜头)同时拍摄到同一个场景,再通过计算机算法来获取该场景深度…

机器视觉尺寸测量仪 助力打造智能工厂!
摘要:机器视觉系统基本的特点就是提高生产的灵活性和自动化程度,目前机器视觉技术在蓬勃发展中,机器视觉尺寸测量仪是基于机器视觉原理制造而成的在线几何尺寸精密仪器。本文系统介绍一下该类测量设备。 机器视觉是什么? 简单来讲…

树莓派夜视摄像头拍摄红外LED灯
NoIR相机是一种特殊类型的红外摄像头,其名称来源于"No Infrared"的缩写。与普通的彩色摄像头不同,NoIR相机具备红外摄影和低光条件下摄影的能力。 一般摄像头能够感知可见光,并用于普通摄影和视频拍摄。而NoIR相机则在设计上去除了…
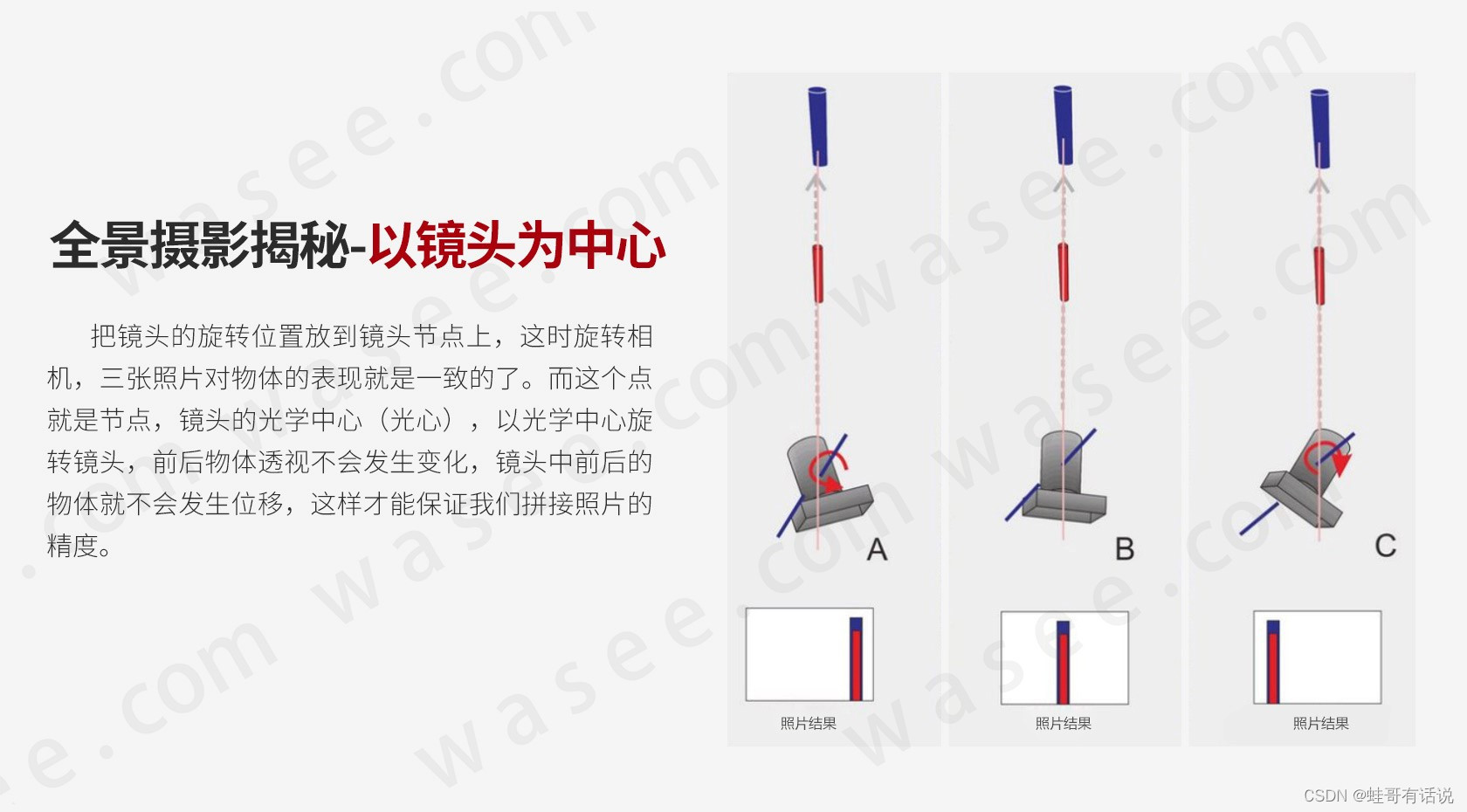
0基础学习VR全景平台篇第134篇:720VR全景,云台调整节点
相机、云台和脚架全套设备组装完成后需要进行调校才能开始拍摄。这一节,我们将主要介绍云台调整的两个内容:对中心靶、调三点一线。(后附调校原理) 云台部件名称
一、调节准备
(一)对于安装好的云台
1.检…
unity学习(68)——相机/模型的旋转/位置计算
这个比想象中要难,而且需要自己写。
1.相机可以转xy两个位置,可以点头和转圈。注意这里有一个if判断(后面返回来发现了这些问题) 2.角色不能点头,只能转圈。 难得是移动方向,因为移动方向(位置)和转向是相…
LightGlue-OpenCV 实现实时相机图片特征点匹配
LightGlue-OpenCV 文章目录 LightGlue-OpenCVStep 1: 创建虚拟环境Step 2: 安装 LightGlue-OpenCV 并运行Step3: 运行 demo_camera.py效果 原理 LightGlue 是一种新的基于深度神经网络,用来匹配图像中的局部特征的深度匹配器。是 SuperGlue 的加强版本。相比于 Supe…
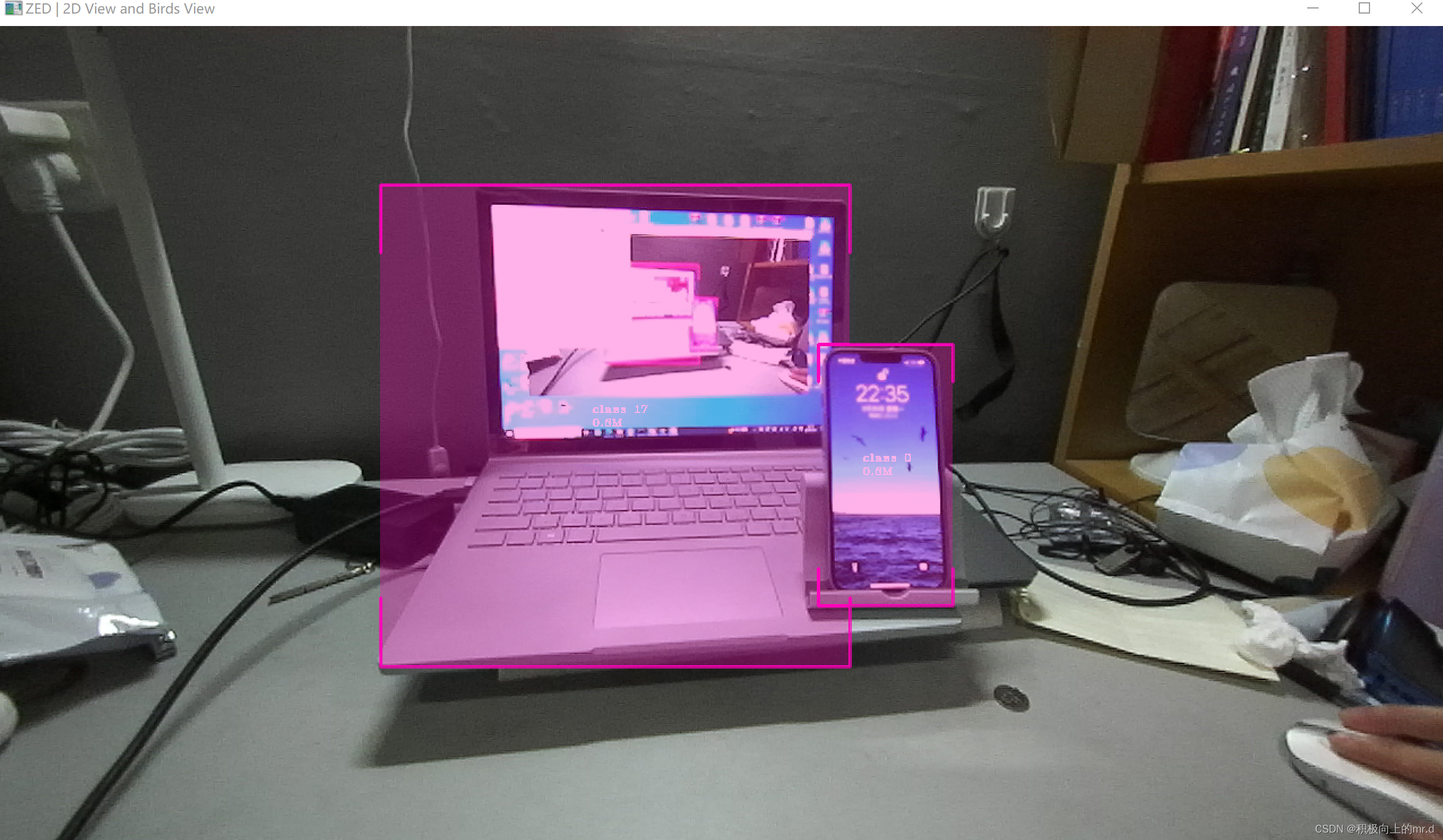
yolov8直接调用zed相机实现三维测距(python)
yolov8直接调用zed相机实现三维测距(python) 1. 相关配置2. 相关代码3. 实验结果 相关链接 此项目直接调用zed相机实现三维测距,无需标定,相关内容如下: 1.yolov5直接调用zed相机实现三维测距(python&#…
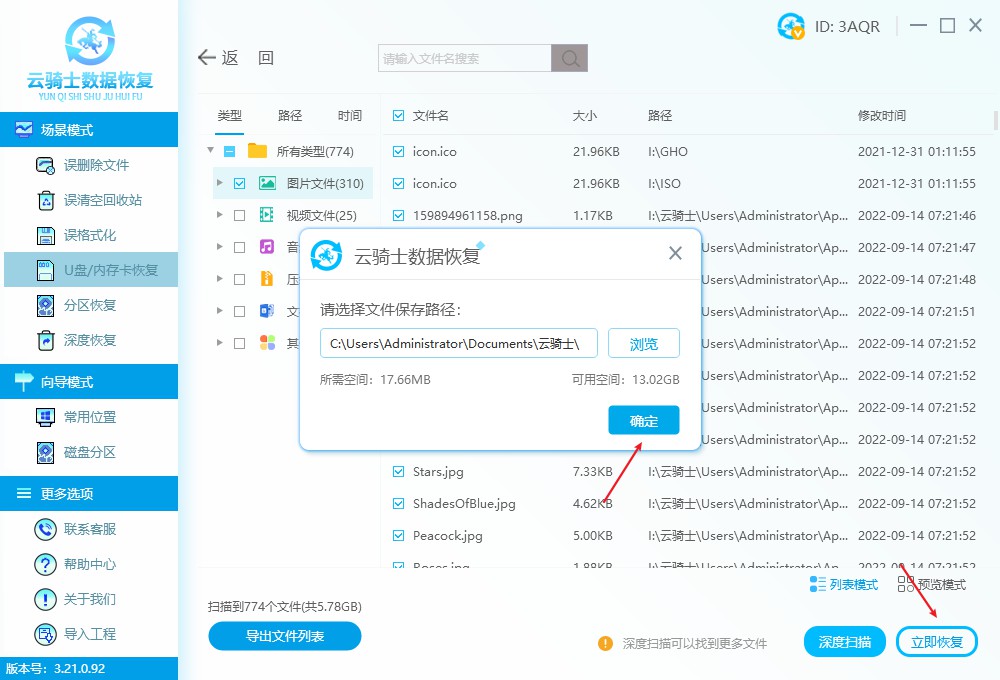
相机显示储存卡未格式化怎么回事?怎么办
在摄影的学习和实践中,相机是我们记录美好瞬间的得力助手。然而,当相机突然提示储存卡未格式化时,这往往会让我们感到困惑和焦虑。本文将探讨相机显示储存卡未格式化的可能原因,并提供相应的解决方案。 图片来源于网络,…
维修欧姆龙OMRON视觉控制器 FZ4-L350 传感器
欧姆龙OMRON视觉控制器 FZ4-L350 传感器
*1. 当同时连接多台不同类型的摄像机时,图像记录容量会发生变化。 *2. 连接每个控制器支持的最大摄像机数量时的电流消耗。 如果将频闪控制器型号连接到灯,则电流消耗与 连接智能小型相机时一样高…
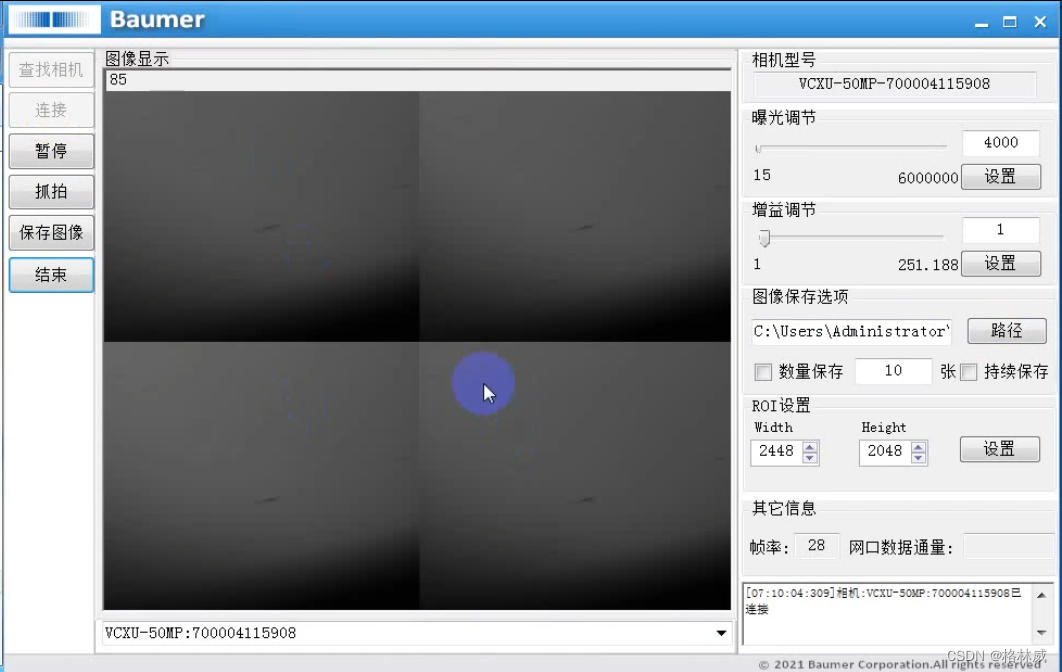
Baumer工业相机堡盟工业相机如何联合GAPI SDK和OpenCV实现相机图像将图像转换为Mat格式再转为Bitmap图像进行显示(C++)
Baumer工业相机堡盟工业相机如何联合GAPI SDK和OpenCV实现相机图像将图像转换为Mat图像格式再转为Bitmap图像进行显示(C) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景代码分析第一步:先引用对应的OpenCV的DLL文件第二…

HarmonyOS NEXT应用开发之Web获取相机拍照图片案例
介绍
本示例介绍如何在HTML页面中拉起原生相机进行拍照,并获取返回的图片。
效果预览图 使用说明
点击HTML页面中的选择文件按钮,拉起原生相机进行拍照。完成拍照后,将图片在HTML的img标签中显示。
实现思路
添加Web组件,设置…
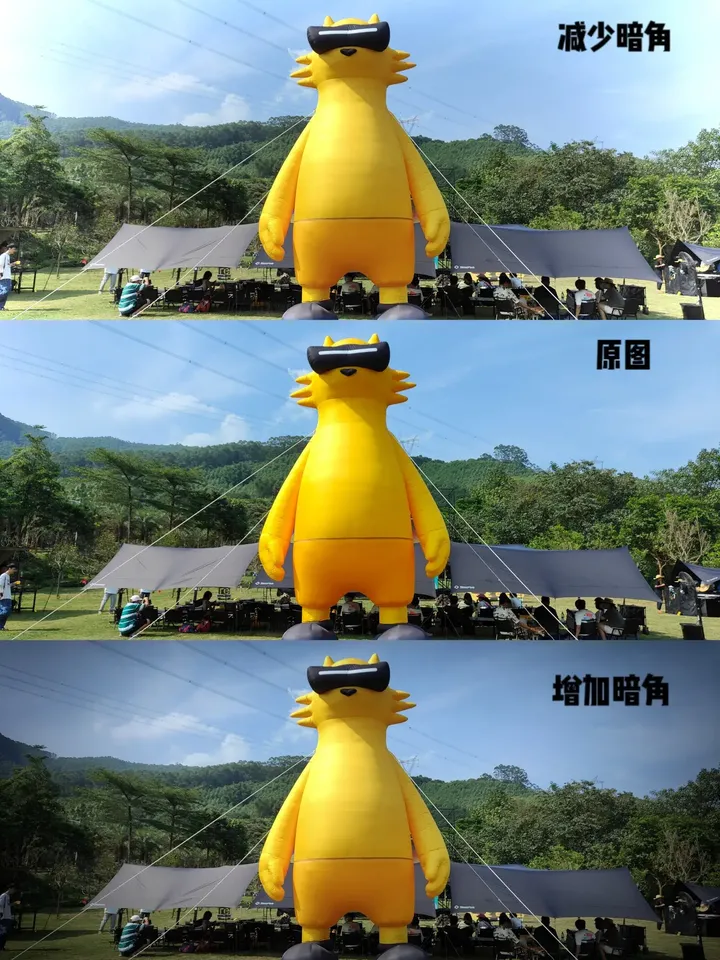
【生活】相机/图像各参数
文章目录 专业模式图片编辑-滤镜实体滤镜软件模拟滤镜 图片编辑-增强曝光亮度对比度饱和度自然饱和度色温色调高光阴影HSL色调分离褪色颗粒锐化晕影清晰度暗角 参考 专业模式 第一个参数WB是白平衡,调节色彩的。 第二个是对焦F,近距离拍摄物体…
vue实现相机拍摄,可录视频、拍照片、前置后置切换(简单小demo)
内容比较简单,不做过多赘述,只做分享,测试demo,功能有些缺陷,希望路过的大佬多多指正
/(*/ω\*)
<script setup>
import { showToast, showSuccessToast, showFailToast, showLoadingToast } from …
基于HALCON的汽车牌照识别研究
基于HALCON的汽车牌照识别研究是智能交通系统和安防监控领域的一个重要方向。HALCON作为一款先进的机器视觉软件,因其强大的图像处理和分析功能,在车牌识别系统的研究和开发中得到了广泛应用。下面将详细介绍基于HALCON的汽车牌照识别技术的研究内容&…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置显示彩色相机和黑白相机的图像(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置显示彩色相机和黑白相机的图像(C)Baumer工业相机Baumer工业相机的彩色和黑白成像的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示图像彩色工业相机在BufferEvent显示图像黑白工业相机在BufferEve…
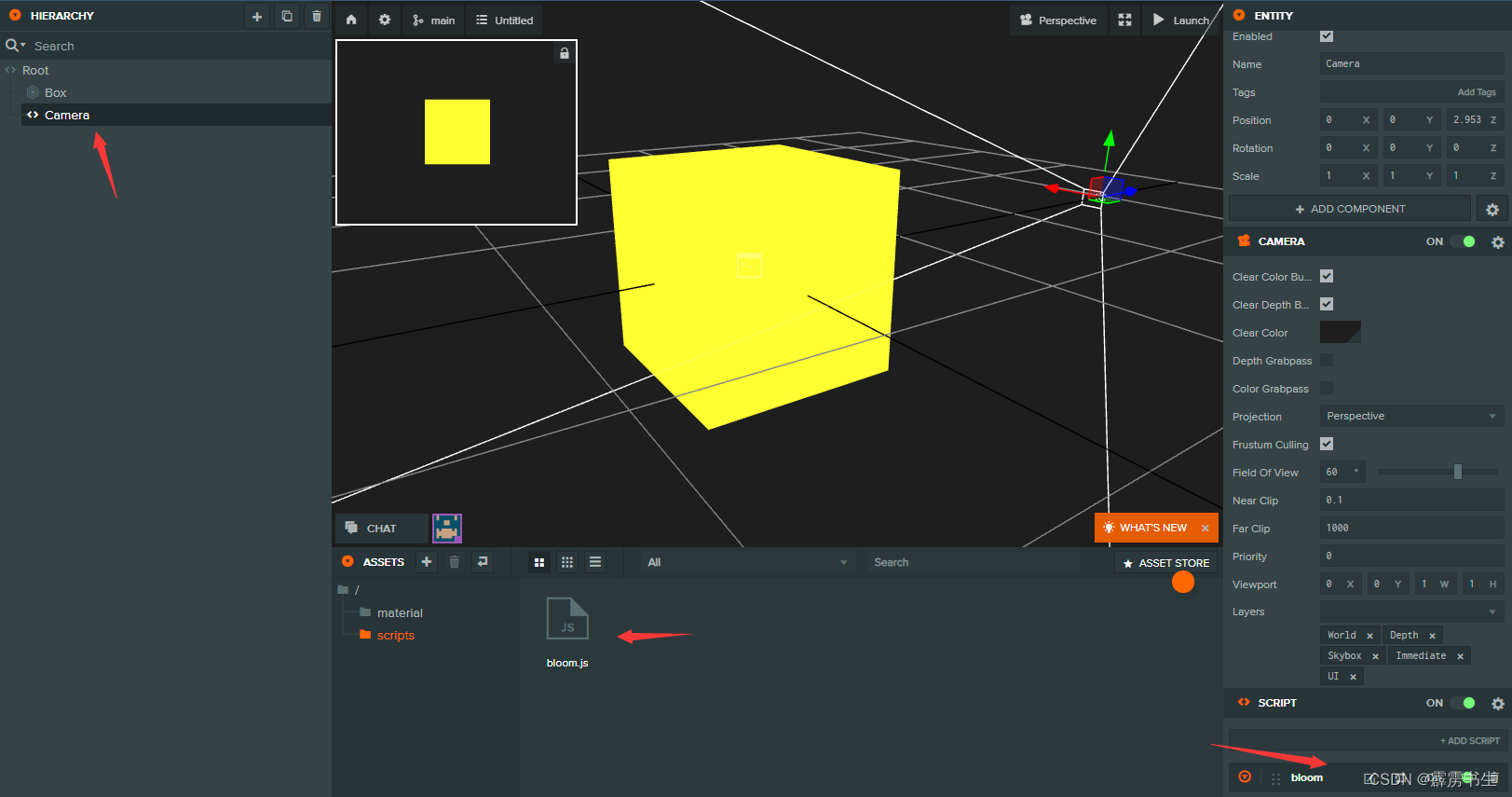
Playcanvas后处理-辉光bloom
(一)Bloom介绍
Bloom(辉光、光晕、泛光)是一种常见的摄像机后处理(PostProcessing)效果,用于再现真实世界相机的成像伪影。这种效果会产生从图像中明亮区域边界延伸的光条纹(或羽毛…

Camera API1 简叙述
目录
一、开启相机
1.1创建项目
1.2注册权限
1.3配置相机特性要求
1.4 获取摄像头的个数
1.5 根据 ID 获取 CameraInfo
facing
1.6 开启相机
1.7 关闭相机
二、预览
2.1认识 Parameters
2.2 设置预览尺寸
2.3添加预览 Surface
2.4 开启和关闭预览
2.5 校正预览画…

零基础学VR全景制作,新手制作流程有哪些?
VR全景技术可以应用于旅游、房地产、教育、娱乐等多个领域,可以为观众提供更加真实、更具沉浸感的体验。可以说,VR全景技术已经逐渐深入到各个领域中,那么对于新手来说,该如何制作VR全景呢? VR全景制作也是需要一定的技…

搜维尔科技:工作室选择 OptiTrack 进行新的虚拟制作舞台
35North Studios 成立于 2020 年,是一家最先进的制作工作室。他们的全方位服务方法可帮助电影制片人和企业在一个设备齐全且先进的地点规划、拍摄、编辑、评分和完成项目。该工作室位于爱荷华州克利尔湖,为创作者提供了一个安静的空间,让他们…
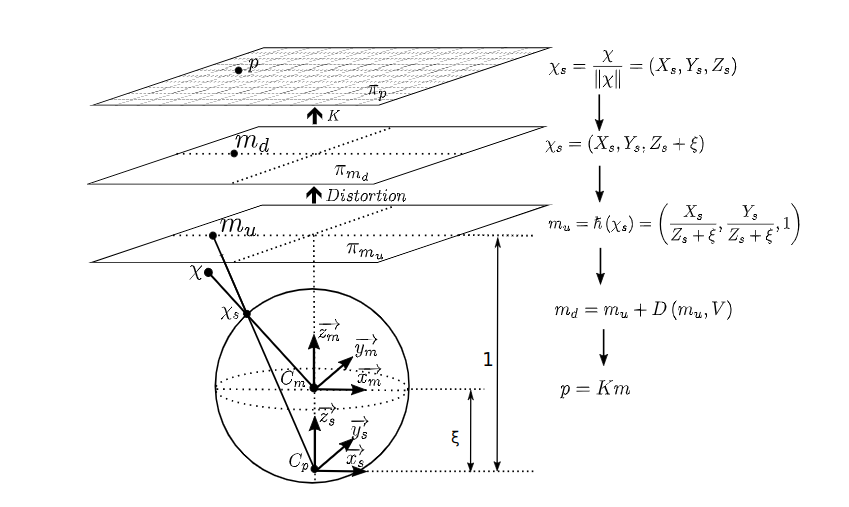
相机与相机模型(针孔/鱼眼/全景相机)
本文旨在较为直观地介绍相机成像背后的数学模型,主要的章节组织如下: 第1章用最简单的针孔投影模型为例讲解一个三维点是如何映射到图像中的一个像素 第2章介绍除了针孔投影模型外其他一些经典投影模型,旨在让读者建立不同投影模型之间的建模…
机器视觉系统选型-选型标定通信
必问镜头:光学放大倍率CCD芯片/视野 (长宽同等方向)
计算镜头选型焦距公式CCD芯片尺寸/视野尺寸*物距
曝光单位是毫秒 1秒1000毫秒
物距:物体到透镜表面的距离
为什么要 标定旋转中心:机械手要抓取物料,…
关于相机与镜头的选型
文章目录 根据检测精度要求选相机分辨率镜头选型计算相机的视野范围和镜头的视场角 根据检测精度要求选相机分辨率
案例:
待测物体大小:10mm 7mm 检测精度:0.01mm 视野范围:12mm 9mm
相机最小分辨率: (…
搜维尔科技:【周刊】适用于虚拟现实VR中的OptiTrack
适用于 VR 的 OptiTrack
我们通过优化对虚拟现实跟踪最重要的性能指标,打造世界上最准确、最易于使用的广域 VR 跟踪器。其结果是为任何头戴式显示器 (HMD) 或洞穴自动沉浸式环境提供超低延迟、极其流畅的跟踪。 OptiTrack 主动式
OptiTrack 世界领先的跟踪精度和…
机械臂手眼标定ZED相机——眼在手外python、matlab
目录
1.眼在手外原理
2.附上眼在手外求得手眼矩阵的python代码
3.眼在手外标定步骤
1)打印棋盘格
2)得到hand数据
3)得到camera数据
4.运行python得到手眼矩阵 1.眼在手外原理 眼在手外所求的手眼矩阵是基坐标到相机的转换矩阵
2.附上…

十五.镜头知识之景深(Depth of Field)
十五.镜头知识之景深(Depth of Field) 文章目录 十五.镜头知识之景深(Depth of Field)15.1 概述15.2 景深(depth of field)定义15.3 景深原理15.3.1 弥散圆(circle of confusion) 15.4 景深总结 15.1 概述
先看两个例子,拍摄花、昆虫等照片时,背景拍的比…
raw图片处理推荐 DxO PhotoLab 6 for Mac中文最新
DxO PhotoLab 6是一款专业的RAW图片处理软件,适用于Mac操作系统。它具有先进的图像处理技术和直观易用的界面,可帮助用户轻松地将RAW格式的照片转换为高质量的JPEG或TIFF图像。以下是对DxO PhotoLab 6软件的详细介绍:
RAW图像处理࿱…
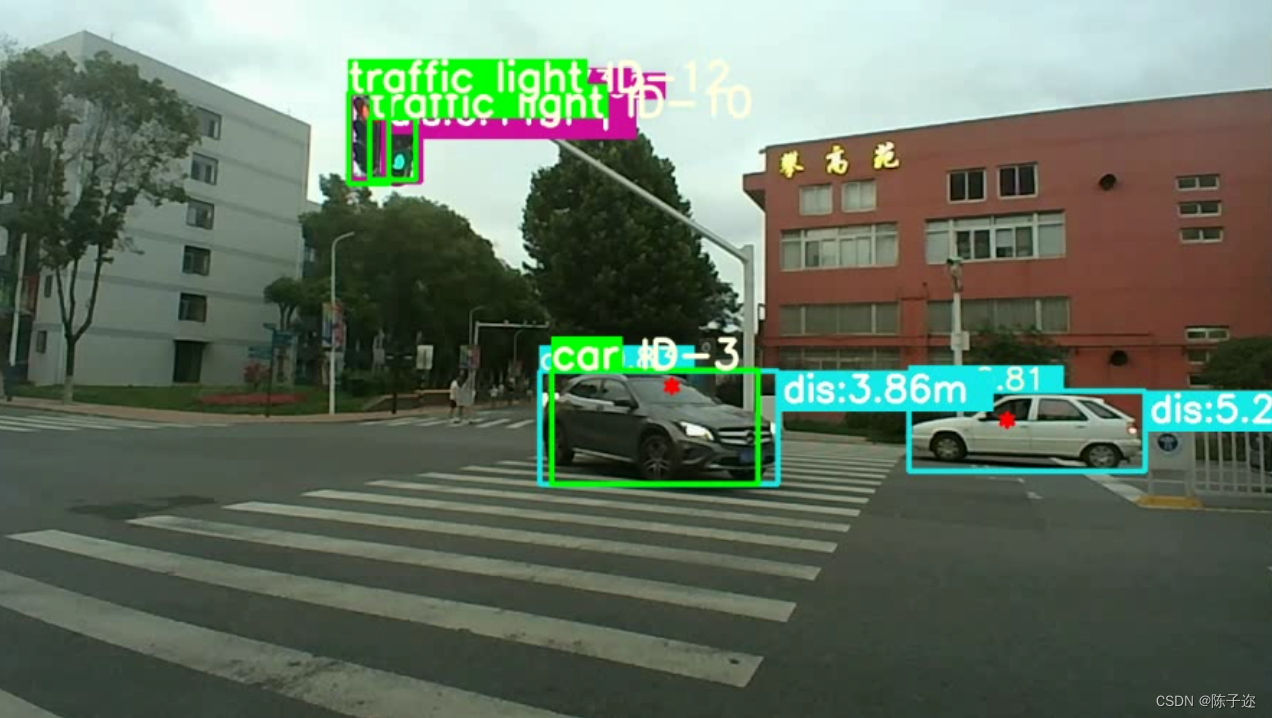
基于yolov5的目标检测和双目测距
目录
一.简介
1.双目视觉
2 YOLOv5
二.双目准备
1双目矫正
2.测距部分代码和函数
三.yolov5部分代码代码展示 效果展示 一.简介
1.双目视觉
双目视觉是通过两个摄像机同时拍摄同一场景,通过计算两幅图像的差异来获取深度信息的一种计算机视觉技术。在双目视…
线扫相机MindVision迈德威视-相机平场矫正详细步骤
现场要求 (1)采集卡连续采集相机图像,并正常显示。 (2) 光源控制在正常工作亮度,使画面亮度不要过低也不要饱和。 (3) 调整相机使画面偏离成像位置,形成虚焦。 (4) 相机拍摄物面使用白纸,调节曝光时间使整个物面亮度均匀ÿ…
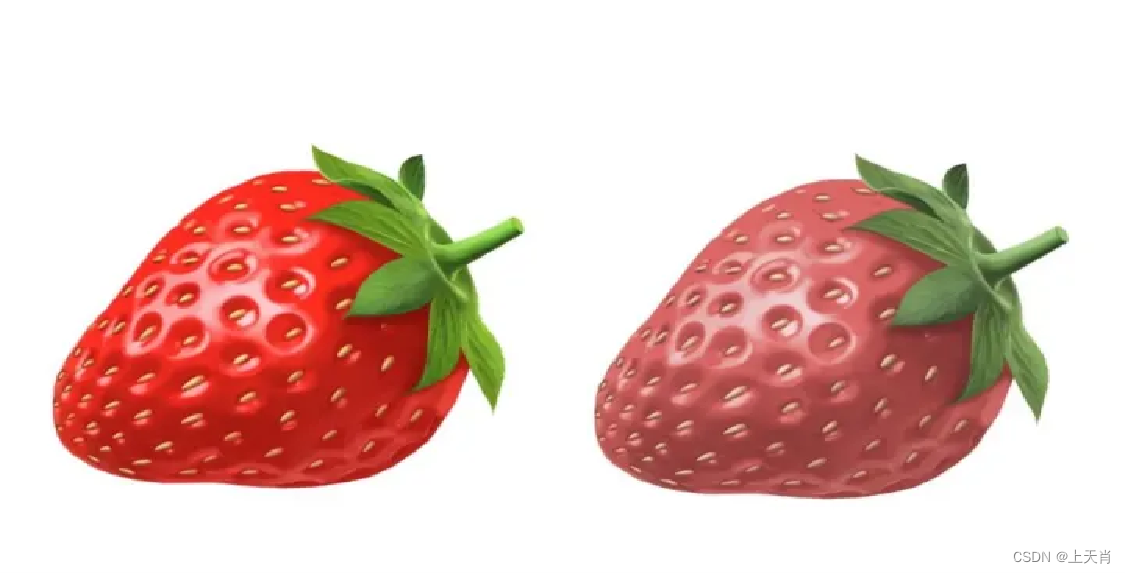
相机图像质量研究(40)常见问题总结:显示器对成像的影响--画面泛白
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成…
抗辐射相机行业深度分析及投资机会探讨
一、市场趋势
抗辐射相机作为特种设备,主要用于军事侦察、核工业检测、太空探索等高辐射环境下的成像需求。随着全球核能和太空探索活动的增加,对高性能抗辐射相机的需求呈现上升趋势。此外,国家安全防护级别的提升也为该行业带来了新的增长…
在基于Android相机预览的CV应用程序中使用 OpenCL
查看:OpenCV系列文章目录(持续更新中......)
上一篇:OpenCV4.9.0在Android 开发简介
下一篇:在 MacOS 中安装 本指南旨在帮助您在基于 Android 相机预览的 CV 应用程序中使用 OpenCL ™。教程是为 Android Studio 20…
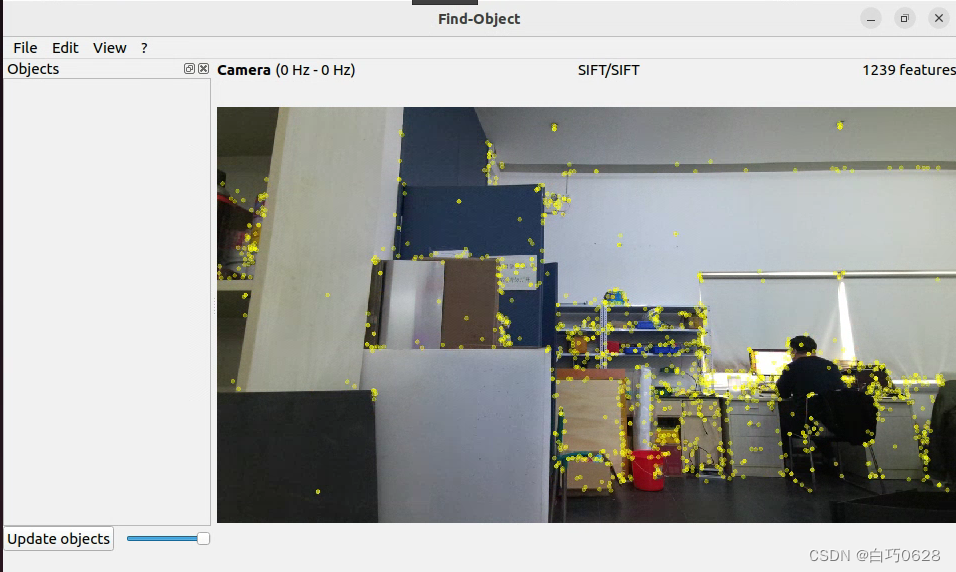
ubuntu22.04配置Azure Kinect DK深度相机
一.安装SDK 今天我来配置一下微软公司的Azure Kinect DK深度相机,以前在ubuntu18.04上配置过,因为官方说唯一支持linux版本是18.04,所以在18.04中配置还算顺利 but这不代表不可以在更高版本的ubuntu中使用,只不过需要自己…
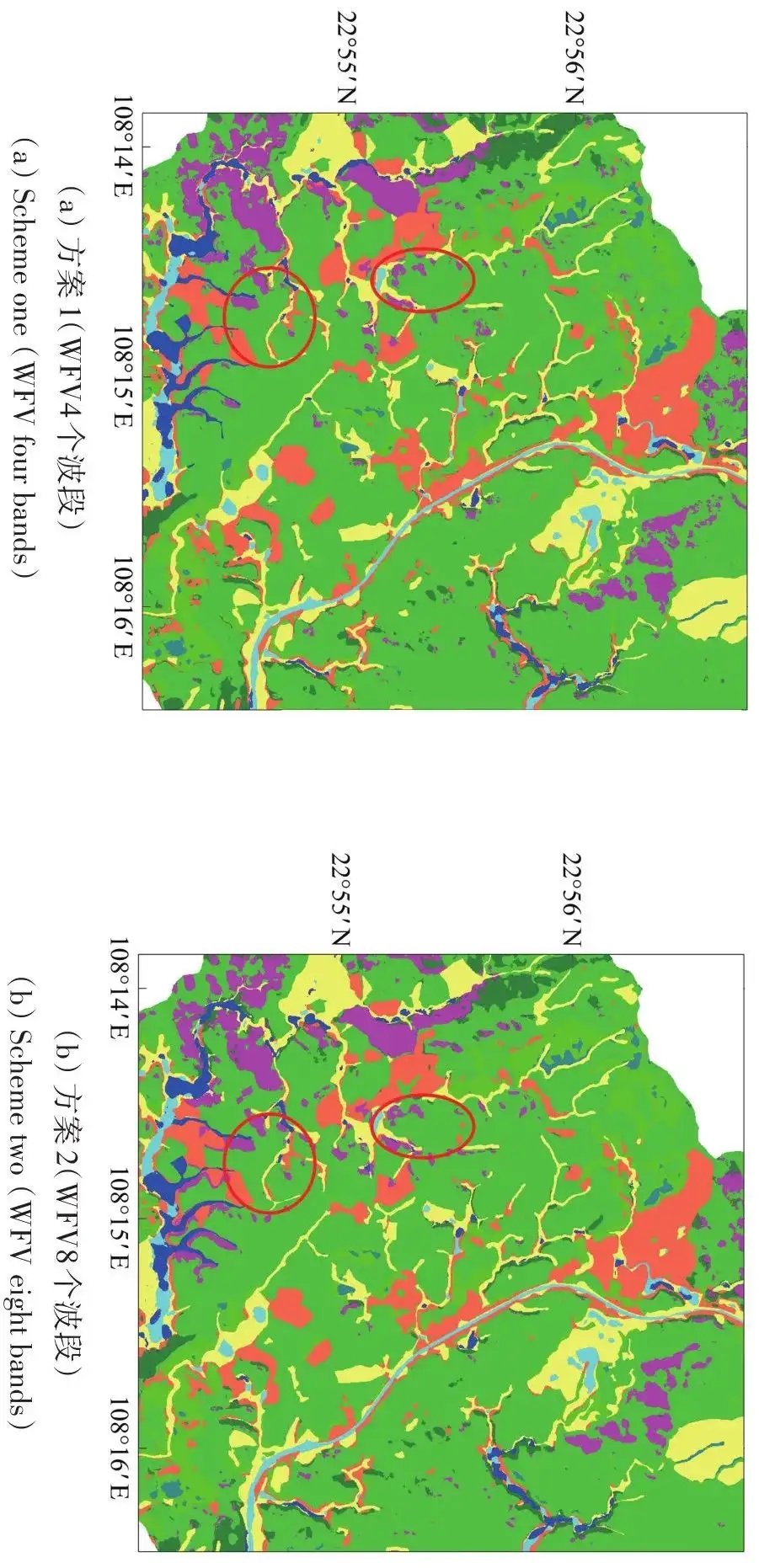
【卫星家族】 | 高分六号卫星影像及获取
1. 卫星简介
高分六号卫星(GF-6)于2018年6月2日在酒泉卫星发射中心成功发射,是高分专项中的一颗低轨光学遥感卫星,也是我国首颗精准农业观测的高分卫星,具有高分辨率、宽覆盖、高质量成像、高效能成像、国产化率高等特…
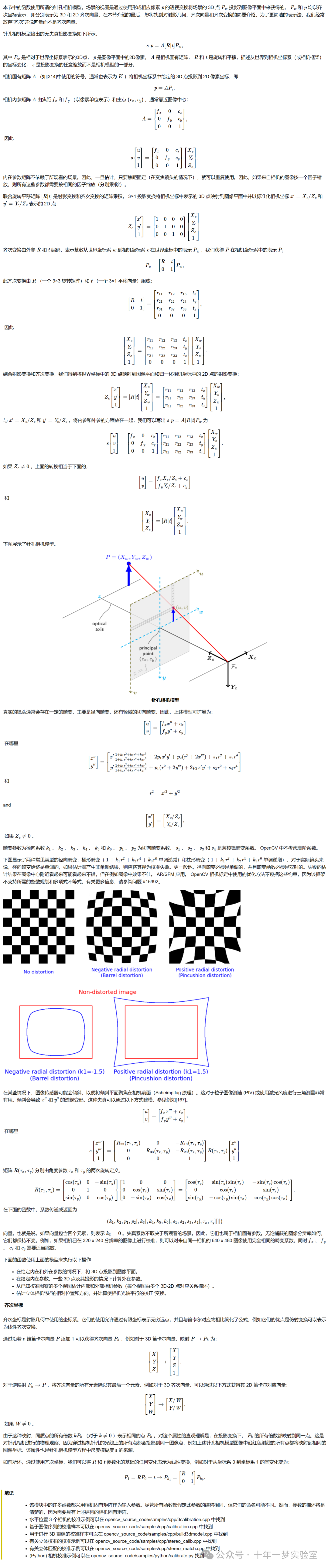
【opencv】示例 3calibration.cpp 利用OpenCV库进行三路相机校准
此代码是一个利用OpenCV库进行三路相机校准的C程序。这个示例程序主要用于校准水平摆放的三台相机。 以下是关键函数及其功能的简要总结: help(char** argv): 显示程序的使用方法。calcChessboardCorners(Size boardSize, float squareSize, vector<Point3f>&…
tinker CAD入门操作
入门 - 导航和菜单 欢迎来到设计世界! 设计是发现所有尚未完成的东西的艺术。它是学习和教学,打破和制造,看到和展示的平等部分。 设计就是分享! Tinkercad是一款功能强大且易于使用的工具,用于创建数字设计࿰…
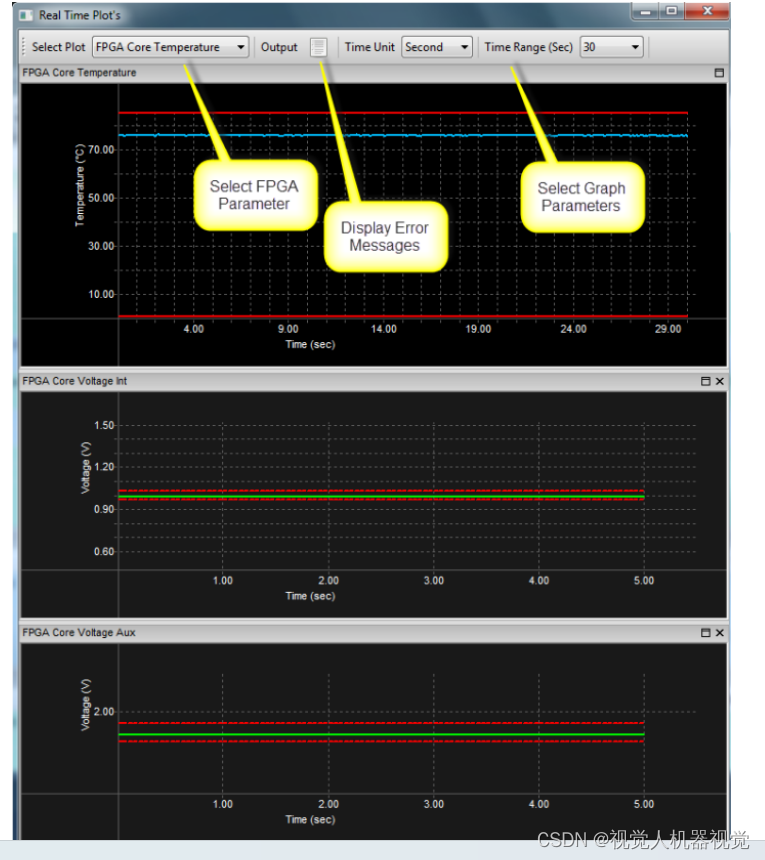
线扫相机DALSA软件开发套件有哪些
Win10和Win7系统完整SDK目录截图:
Sapera Configuration 缓存与内存管理,以及通信端口配置工具,部分功能等效于Detection(查找相机)内的Settings。 Sapera Log Viewer 打开Log Viewer后会显示之前发生过的所有与Sapera LT软件有关的运行信息…

项目设计:YOLOv5目标检测+机构光相机(intel d455和d435i)测距
1.介绍
1.1 Intel D455
Intel D455 是一款基于结构光(Structured Light)技术的深度相机。
与ToF相机不同,结构光相机使用另一种方法来获取物体的深度信息。它通过投射可视光谱中的红外结构光图案,然后从被拍摄物体表面反射回来…