tcp/ip
毕业设计
redis
集群模式
图像处理
皮卡丘
zookeeper
正射矫正
OData
度中心性
CRM
文档协作
运维实战
哈夫曼树
网页设计与制作
YOLOX
图像分类
Error
laravel
Gerber
移动机器人
2024/4/12 0:33:05
基于模糊神经网络的移动机器人路径规划matlab仿真
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
4.1 移动机器人路径规划问题概述
4.2 模糊系统与模糊逻辑
5.完整程序 1.程序功能描述
基于模糊神经网络的移动机器人路径规划
1.环境地图中的障碍物为静态、未知障碍物,可以随…
动力学约束下的运动规划算法——Hybrid A*算法(附程序实现及详细解释)
前言(推荐读一下) 本文主要介绍动力学约束下的运动规划算法中非常经典的Hybrid A*算法,大致分为三部分,第一部分是在传统A * 算法的基础上,对Hybrid A * 算法的原理、流程进行理论介绍。第二部分是详细分析 MotionPl…
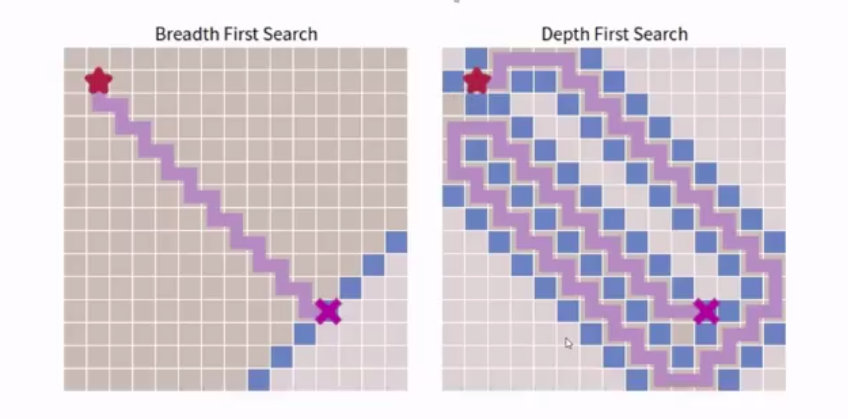
移动机器人运动规划---基于图搜索的基础知识---广度优先遍历与深度优先遍历
移动机器人运动规划---基于图搜索的基础知识---广度优先遍历与深度优先遍历 广度优先搜索(BFS)深度优先搜索(DFS)BFS vs DFS 图搜索优化的方向就是: 按照什么规则去访问节点,按照什么规则弹出节点ÿ…
基于ZYNQ的移动机器人控制器设计(一)
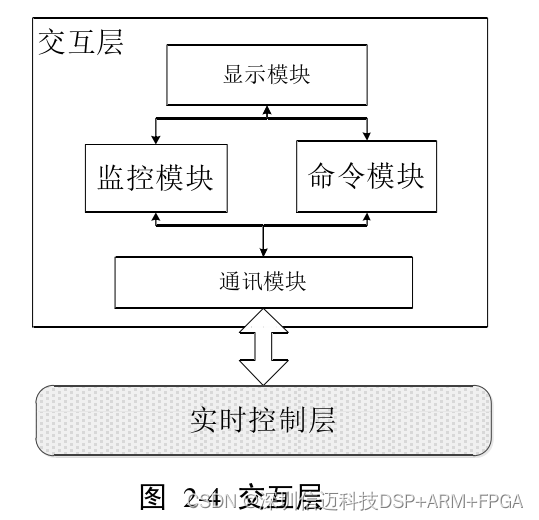
移动机器人的设计是一个集软件、硬件、机械知识于一体的工作,因此,一套完整 方案的提出,则要展示其在机械结构、硬件架构、软件层次上的关键技术。
2.1应用场景描述和需求分析 本节首先对论文提出的移动机器人控制器方案的应用场景进行描述…

base_lcoal_planner的LocalPlannerUtil类中getLocalPlan函数详解
本文主要介绍base_lcoal_planner功能包中LocalPlannerUtil类的getLocalPlan函数,以及其调用的transformGlobalPlan函数、prunePlan函数的相关内容 一、getLocalPlan函数 getLocalPlan函数的源码如下:
bool LocalPlannerUtil::getLocalPlan(const geomet…

“移动机器人课程群实践创新的困境与突围”素材
以下是一篇应用型本科教研论文“移动机器人课程群实践创新的困境与突围”的大纲。您可以根据这个大纲展开您的论文写作: 一、引言
移动机器人技术的发展和应用价值移动机器人课程群在应用型本科教育中的重要性论文目的和研究问题:解析移动机器人课程群实…

Chapter4:机器人仿真
ROS1{\rm ROS1}ROS1的基础及应用,基于古月的课,各位可以去看,基于hawkbot{\rm hawkbot}hawkbot机器人进行实际操作。 ROS{\rm ROS}ROS版本:ROS1{\rm ROS1}ROS1的Melodic{\rm Melodic}Melodic;实际机器人:Ha…

ROS2 学习(一)ROS2 简介与基本使用
参考引用 动手学 ROS2 1. ROS2 介绍与安装
1.1 ROS2 的历史
ROS(Robot Operating System,机器人操作系统),但 ROS 本身并不是一个操作系统,而是可以安装在现在已有的操作系统上(Linux、Windows、Mac&…

应试教育导致学生迷信标准答案惯性导致思维僵化-移动机器人
移动机器人课程群实践创新的困境与突围 一、引言
随着科技的快速发展,工程教育变得越来越重要。然而,传统的应试教育模式往往侧重于理论知识的传授,忽视了学生的实践能力和创新精神的培养。这在移动机器人课程群的教学中表现得尤为明显。本文…
移动机器人运动规划---基于图搜索的基础知识---配置空间
配置空间
机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为C-space
机器人配置:表示对机器人上面所以点的位置的描述机器人自由度:规划的时候用最少的坐标数量去表示机器人配置,例如无人机…
计算机视觉与深度学习 | 视觉里程计(Visual Odometry,VO)研究现状
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545
===================================================== 视觉里程计(Visual Odometry,VO) 研究背景及意义视觉里程计国内外研…

reeds_sheep运动规划算法Python源码分析
本文用于记录Python版本zhm-real / PathPlanning运动规划库中reeds_sheep算法的源码分析 关于reeds sheep算法的原理介绍前文已经介绍过了,链接如下所示: 《Reeds-Shepp曲线学习笔记及相关思考》 《Reeds-Shepp曲线基础运动公式推导过程》 正文ÿ…
中国大学MOOC移动机器人技术基础1答案
本文转载自 众课帮 公众号 1、热气球飞行主要靠( )原理 A、浮力原理 B、反作用力原理 C、牛顿原理 D、伯努利原理 答案:浮力原理 2、火箭飞行主要靠( )原理 A、浮力原理 B、伯努利原理 C、燃烧动力 D、反作用力原理 答…
ROS部署到机器人小车并实现底层电机控制过程中遇到的问题
任务:在实验室原有的基于can总线控制的移动机器人平台上应用ROS步骤:1.ROS推荐系统为ubuntu,首先需要重装机器人的操作系统。 2.下载并安装ROS。 3.原can卡不支持linux系统,须更换机器人的usbcan设备。 …

移动机器人设计与实践课程大纲
MiR移动机器人参考资料:图一 西北工业大学-课程平台图二 清华大学出版社-移动机器人目前,基本都是双一流大学开设此类课程,并且都是至少3-4学分,16学时/学分,48-64学时。(⊙﹏⊙),难办了。咱这只有…
移动机器人运动规划 --- 基于图搜索的Dijkstra算法
移动机器人运动规划 --- 基于图搜索的Dijkstra算法 Dijkstra 算法Dijkstra 算法 伪代码流程Dijkstra 算法步骤示例Dijkstra算法的优劣分析 Dijkstra 算法
Dijkstra 算法与BFS算法的区别就是 : 从容器中弹出接下来要访问的节点的规则不同
BFS 弹出: 层级最浅的原则,…
在ros的类中使用message_filters订阅2个topic数据
在ros的类中使用message_filters订阅2个topic的图像数据
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include <future>class ImageSubsc…